常德西门子一级代理商
参数请求及参数应答的结构
参数请求包括三部分:请求标题、参数地址及参数值。
表1.参数请求格式
表2.参数应答格式
表3.参数请求及应答描述
表4.在DPV1参数应答中的错误值描述
3. S7-300/400PLC通过PROFINET IO非周期性通讯方式读取驱动器参数。
请注意:PLC读取驱动器参数时必须使用两个功能块SFB52 / SFB53
举例如下:
(1) 使用标志位M0.0及功能块SFB53将读请求(数据集RECORD DB11)(图16)发送至驱动器。
将M0.0设定为数值1启动读请求,当读请求完成后必须将该请求置0,结束该请求。ERROR = 1: 表示执行此功能块时有错误产生,而STATUS 指示功能块执行状态或错误信息 。
(2) 使用标志位M1.0及功能块SFB52读取参数的请求响应(响应块DB22)(参见图17) 。
将M1.0设定为数值1读取参数请求响应,完成后必须将该位置0,结束该请求。ERROR = 1: 表示执行此功能块时有错误产生,而STATUS 指示功能块执行状态或错误信息 。
图15 PROFINET IO读参数请求
图16 PROFINET IO读参数响应
图17 PROFINET IO读参数变量表
4. S7-300/400PLC通过PROFINET IO非周期性通讯方式修改驱动器参数P1216。
举例如下:
PLC写参数时只需使用SFB53,在本项目的Network 2中发送写请求DB33 (参见图19) 到驱动器; PLC读“写参数"响应时需使用SFB52,在本项目中读取驱动器返回的参数值数据块为DB22 (参见图20) 。
(1) 将M0.2设定为数值1启动写请求,当写请求完成后必须将该请求置0,结束该请求。ERROR = 1: 表示执行此功能块时有错误产生,而STATUS 指示功能块执行状态或错误信息 。
(2) 将M1.0设定为数值1读请求,完成后必须将该请求置0,结束该请求。ERROR = 1: 表示执行此功能块时有错误产生,而STATUS 指示功能块执行状态或错误信息
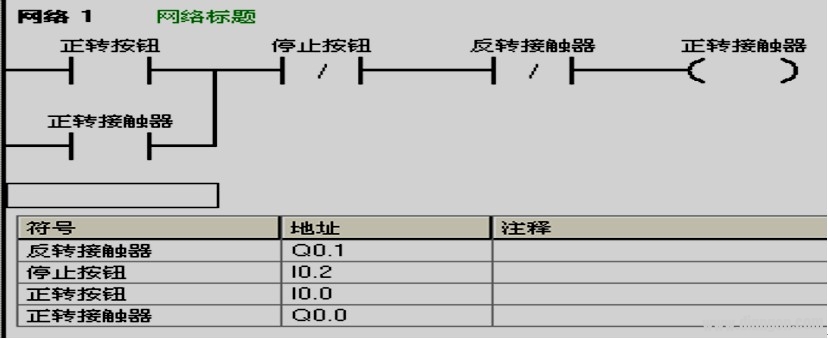
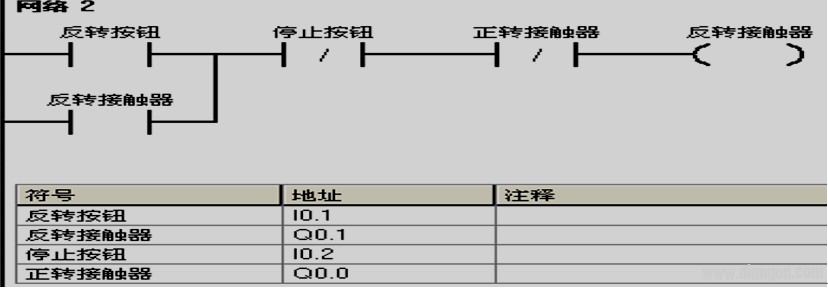
用西门子plc控制电动机正反转的编程
在该控制线路中,KM1 为正转交流接触器,KM2 为反转交流接触器,SB1 为停止按钮、SB2 为正转控制按钮,SB3 为反转控制按钮。KM1、KM2 常闭触点相互闭锁,当按下SB2 正转按钮时,KM1 得电,电机正转;KM1 的常闭触点断开反转控制回路,此时当按下反转按钮,电机运行方式不变;若要电机反转,必须按下SB1停止按钮,正转交流接触器失电,电机停止,再按下反转按钮,电机反转。若要电机正转,也必须先停下来,再来改变运行方式。这样的控制线路的好处在于避免误操作等引起的电源短路故障。
PLC 控制电机正反转I/O 分配及硬件接线1、接线:按照控制线路的要求,将正转按纽、反转按纽和停止按纽接入PLC 的输入端,将正转继电器和反转继电器接入PLC 的输出端。注意正转、反转控制继电器必须有互锁。
2、编程和下载:在个人计算机运行编程软件STEP 7 Micro-WIN4.0,对电机正反转控制程序的I/O 及存储器进行分配和符号表的编辑,实现电机正反转控制程序的编制,并通过编程电缆传送到PLC 中。在STEP 7 Micro-WIN4.0 中,单击“查看”视图中的“符号表”,弹出图所示窗口,在符号栏中输入符号名称,中英文都可以,在地址栏中输入寄存器地址。 3、图符号表定义完符号地址后,在程序块中的主程序内输入如下图程序。注意当菜单“察看”中“√符号寻址”选项选中时,输入地址,程序中自动出现的是符号编址。若选中“查看”菜单的“符号信息表”选项,每一个网络中都有程序中相关符号信息。 4、程序监控与调试:通过个人计算机运行编程软件STEP 7 Micro-WIN4.0,在软件中应用程序监控功能和状态监视功能,监测PLC 中的各按纽的输入状态和继电器的输出状态。
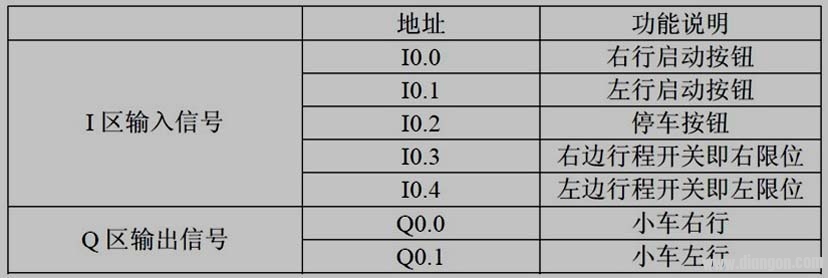
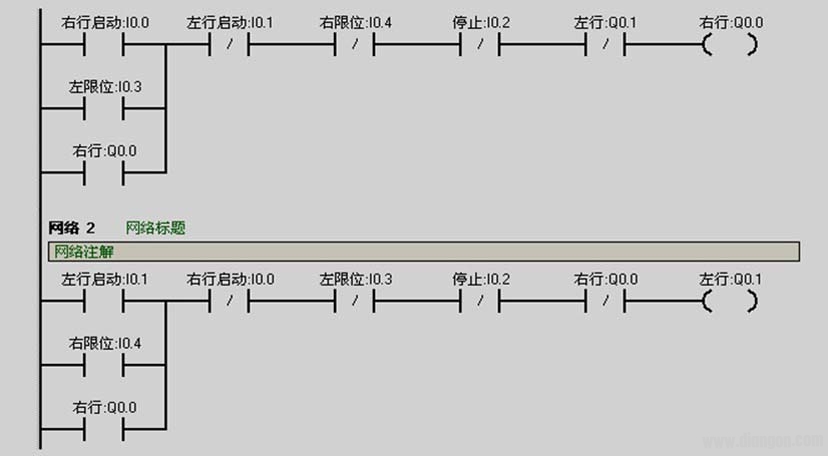
5、电机的正反转控制项目结果分析表:注意在硬件接线中必须实现互锁!在PLC 的梯形图中也应实现互锁。试分析仅在梯形图中实现的互锁能否真正避免电源的短路? 有电机的正反转控制项目的基础,可以用西门子S7-200实现小车往返的自动控制。控制过程为:按下启动按钮,小车从左边往右边(右边往左边运动)当运动到右边(左边)碰到右边(左边)的行程开关后小车自动做返回运动,当碰到另一边的行程开关后又做返回运动。如此的往返运动,直到当按下停车按钮后小车停止运动。 设计思路:可以按照电气接线图中的思路来进行编写程序。即可以利用下一个状态来封闭前一个状态。使其两个线圈不会动作。把行程开关作为一个状态的转换条件。电气接线图如下:
进行程序的编写,要进行 I/O口的分配。
根据要求,I/O口的分配如下表所示。I/O口分配好后可以根据上面的电气接线图进行程序的编写。参考程序如下:
|