
西门子鞍山PLC模块总代理
plc功能图的基本构成元素是步、有向线段、转移和动作说明。
(1)步和初始步。
步是控制系统中的一个相对不变的性质,它对应于一个稳定的状态。在功能流程图中步通常表示某个执行元件的状态变化。步用矩形框表示,框中的数字是该步的编号,编号可以是该步对应的工步序号,也可以是与该步相对应的编程元件(如PLC内部的位存储器、顺序控制继电器等)。步的图形符号如图1(a)所示。当系统处于某一步所在的阶段时,该步处于活动状态,通常称为“活动步”。
初始步对应于控制系统的初始状态,是系统运行的起点。初始步通常是系统处于等待启动命令的相对静止的状态。一个控制系统至少有一个初始步,初始步用双线框表示,如图1(b)所示。
(2)有向线段和转移。
转移是为了说明从一个步到另一个步的切换条件。两个步之间用一个有向线段表示可以切换,指明了转移的方向(向下的箭头可以省略)。
在两个步之间的有向线段上用一段短横线表示转移。在短横线旁,可以用文字、图形符号或逻辑表达式注明转移条件的具体内容。当邻两步之间的转移条件满足时,两步之间自动的切换得以实现。
有向线段和转移及转移条件如图2所示。
图1 步和初始步
图2 转移
(3)动作说明。
一个步表示控制过程中的稳定状态,它可以对应一个或多个动作。可以在步右边加一个矩形框,在框中用简明的文字说明该步对应的动作,如图7.8所示。
动作可以分为存储型和非存储型两类,非存储型动作是指当动作所对应的步为活动步时,动作被执行;步为非活动步时,动作停止。存储型动作则是指动作所对应的步为活动步时,动作被执行;步为非活动步时,动作继续执行。
图3(a)表示一个步对应一个动作;当一个步对应多个动作时,可以利用图3b)或3(c)中的任意一种表示,图中仅表示步所对应的动作,不隐含动作执行的顺序。
图3 步对应的动作
只有在前面指令的RLO为“1”(能流通过线圈)时,才会执行---( R )(复位线圈)。如果能流通过线圈(RLO为“1”),将把单元的指定<地址>复位为“0”。RLO为“0”(没有能流通过线圈)将不起作用,单元指定地址的状态将保持不变。<地址>也可以是值复位为“0”的定时器(T编号)或值复位为“0”的计数器(C编号)。
MCR (主控继电器)依存关系
只有将复位线圈置于激活的MCR区内时,才会激活MCR依存。在激活的MCR区内,如果MCR处于接通状态并且复位线圈有能流通过,将把寻址位状态复位为“0”。如果MCR处于断开状态,则无论能流状态如何,单元指定地址的当前状态均保持不变。
状态字:
| BR | CC 1 | CC 0 | OV | OS | OR | STA | RLO | /FC | |
| 写: | - | - | - | - | - | 0 | X | - | 0 |
实例:
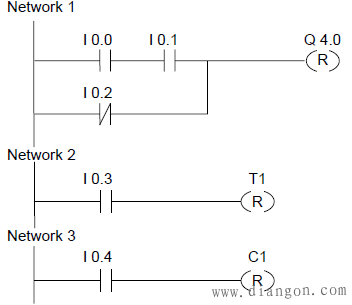
满足下列条件之一时,将把输出端Q4.0的信号状态复位为“0”:
①输入端I0.0和I0.1的信号状态为“1”时
②或输入端I0.2的信号状态为“0”时。
③如果RLO为“0”,输出端Q4.0的信号状态将保持不变。
满足下列条件时才会复位定时器T1的信号状态:输入端I0.3的信号状态为“1”时。
满足下列条件时才会复位计数器C1的信号状态:输入端I0.4的信号状态为“1”时。
如果实例梯级在激活的MCR区之内:
①MCR处于接通状态时,将按以上所述复位Q4.0、T1和C1。
②MCR处于断开状态时,无论RLO的状态(能流状态)如何,Q4.0、T1和C1的状态均保持不变
plc在工业中应用广泛,plc的日常维护和保养成为重点。
一、保养规程、设备定期测试、调整规定
(1)每半年或季度检查PLC柜中接线端子的连接情况,若发现松动的地方及时重新坚固连接;
(2)对柜中给主机供电的电源每月重新测量工作电压;
二、设备定期清扫的规定
(1)每六个月或季度对PLC进行清扫,切断给PLC供电的电源把电源机架、CPU主板及输入/输出板依次拆下,进行吹扫、清扫后再依次原位安装好,将全部连接恢复后送电并启动PLC主机。认真清扫PLC箱内卫生;
(2)每三个月更换电源机架下方过滤网;
三、检修前准备、检修规程
(1)检修前准备好工具;
(2)为保障元件的功能不出故障及模板不损坏,必须用保护装置及认真作防静电准备工作;
(3)检修前与调度和操作工联系好,需挂检修牌处挂好检修牌;
四、设备拆装顺序及方法
(1)停机检修,必须两个人以上监护操作;
(2)把CPU前面板上的方式选择开关从“运行”转到“停”位置;
(3)关闭PLC供电的总电源,关闭其它给模坂供电的电源;
(4)把与电源架相连的电源线记清线号及连接位置后拆下,拆下电源机架与机柜相连的螺丝,电源机架就可拆下;
(5)CPU主板及I/0板可在旋转模板下方的螺丝后拆下;
(6)安装时以顺序进行
plc的DI_BCD指令符号
表1为DI_BCD转换指令说明表。
表1 DLBCD转换指令说明表
参 数 | 数据类型 | 存储器区域 | 说 明 |
EN | BOOL | I、Q、M、L、D | 允许输入 |
ENO | I、Q、M、L、D | 允许输出 | |
IN | DINT | 双整型数 | |
OUT | DWORD | 双整型数的BCD码 |
DI_BCD(将双整型数转换为BCD码)指令,读输入参数IN的内容,是一个双整型数(32位),并转换为7位数BCD码(BCD码数的范围:+/- 9999999),转换的结果由参数OUT输出。如果转换有“溢出”出现(双整型数的值超出+/- 9999999),ENO将置成“0”。
表2为DI_BCD转换指令对状态位的影响。
表2 DI_BCD转换指令对状态位的影响
- | BR | CC1 | CC0 | OV | OS | OR | STA | RLO | /FC |
写状态位 | x | - | 0 | x | 1 |
如图2所示,如果输入I0.0的信号状态为“1”,读作为双整型数的MD8的内容,并转换成7位BCD码。转换结果存放在MD12中。如果有“溢出”出现,或转换没有被执行(I0.0=0),则输出.Q4.0置成“1”。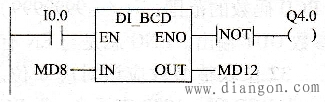
图2 DI_BCD转换指令应用举例