随着技术的沉淀,无人机已经显现出其巨大的生产力功能。无人机应用领域日渐广泛,扩展到了农业、应急救援、消防、能源、测绘与城市管理等多个垂直领域,助力细分行业的升级迭代。

精灵 4 RTK 内置厘米级导航和定位系统,具有支持 RTK 和 PPK 双解决方案的高性能成像系统。为了提供可直接交付的成像,精灵 4 RTK 将经过工厂校准的镜头参数与位置、高度等多维度数据一起记录到每张照片上。在移动网络覆盖较差的区域,精灵 4 RTK 也可连接 D-RTK 2 高精度 GNSS 移动站进行作业。
在测绘等领域,无人机的定位精度直接影响其作业质量。
对于大疆精灵4RTK的使用,
很多行业用户可能并不十分了解,心中有许多疑问,赛尔无人机科技为大家详细列举下大疆精灵4RTK相机的使用方法及软件说明(限收藏)。
1. 大疆精灵4RTK相机参数设置
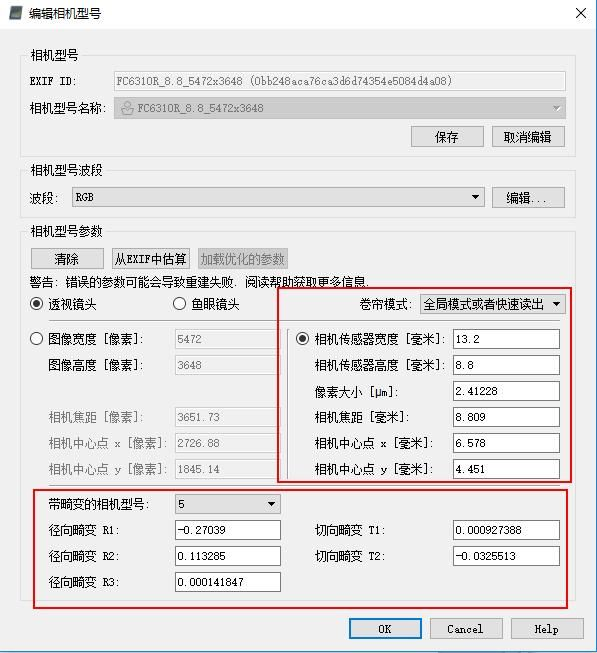
相机型号:FC6310R
传感器尺寸:13.2mm*8.8mm
像幅尺寸:5472*3648
像元大小:2.41微米,13.2mm/5472=2.41228微米
相机焦距:8.8mm

其他说明:
大疆精灵4RTK均已经做过出厂畸变校正,在照片内部已经记录了相应的检校后相机参数,下例所示为赛尔无人机自动精灵4RTK测试机参数,分析可以看出相机畸变特别小。
查看方法:使用word打开照片,搜索相机内方位元素

解义如下:
l 焦距F=(3655.62+3648.68)/2=3652.15像素,转换为毫米3652*2.41=8.809mm
l 像主点偏移(影像中心为原点)X0= -6.65像素,转换为像主点偏移(影像左上角像素中心为原点)X0= 5472/2-6.65-0.5=2729.35像素,转换为毫米2729.35*2.41=6.578mm
l 像主点偏移(影像中心为原点)Y0= 22.79像素,转换为像主点偏移(影像左上角像素中心为原点)Y0= 3648/2+22.79-0.5=1846.79像素,转换为毫米1846.79*2.41=4.451mm
l 径向畸变参数K(pix4d为R):K1=-0.27039 K2=0.113285 K3=0.000141847
l 切向畸变参数P(pix4d为T):P1=0.000927388 P2=-0.0325513
以对应pix4d软件设置相机参数截图如下:
2. 输入图像坐标系设置:
大疆精灵4RTK自带实时差分有两种坐标系设置,WGS84和CGCS2000,两者所获取的都是相应的大地高(椭球高),并非基于国家85高程基准的正常高,也非全球范围通用的EGM高程基准(正高)。
设置如下:

3. 地理定位精度设置:
大疆精灵4RTK自带实时差分,已经对相机定位做了优化,水平/高程精度应设置为0.1m以下,设置如下:

因为JPG照片存储GPS数据为度分秒格式,为避免数据转换错误,也可以直接使用Timestamp.MRK文件中的GPS,单位为度。文件中经纬度高程均为CMOS中心的实时GPS,精度为厘米级。

如果客户需要投影坐标XYZ文件,可以借助第三方软件进行投影变换,导入pix4d软件处理。
大疆精灵4RTK自带实时差分,已经对相机定位做了优化,pix4d初始化处理z可以使用照片写入的POS信息作为先验参数对空三结果进行优化设置如下:
内方位元素优化:默认或全部
外方位元素优化:无

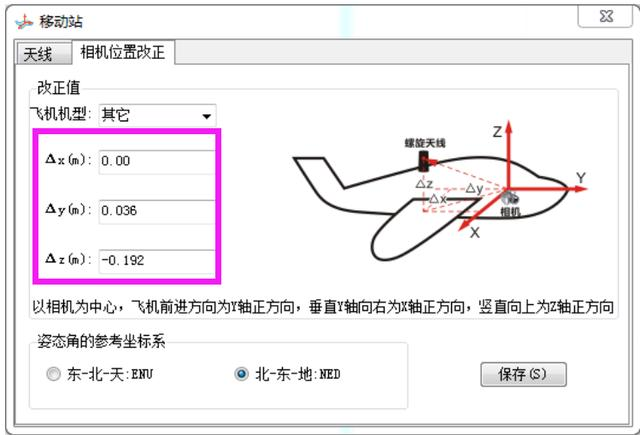
5. 精灵4RTK相位中心到相机CMOS的位置补偿
大疆精灵4RTK自带实时差分,有很多客户可能使用第三方基站进行后差分POS解算,飞机相位中心到相机CMOS的位置补偿机头方向为36mm,高度方向为192mm,和机头方向垂直为0,如下图所示: