SMART模块西门子数字量模块SMART模块西门子数字量模块
SIMATIC S7-200 SMART
西门子,供应商,模块,CPU,PLC模块,SIMATIC西门子触摸屏代理商,西门子西门子电源模块代理,西门子通讯电缆SIMATIC代理商
荆门西门子触摸屏代理商,上海西门子变频器代理商,北京西门子交换机供应商,江苏CPU模块代理商,浙江西门子S7-200,S7-300,S7-1500,S7-1200系列代理商,
| 6ES7511-1AK02-0AB0 | CPU 1511-1 PN,150 KB 程序,1 MB 数据;60 ns;集成 2x PN 接口 |
 IST指令有3个操作数,如下图21-1所示,其中源址S是多种工作方式的选择开关输入位元件起始地址,终址D1、D2分别为程序中一般状态继电器的最小编号和最大编号。其中源址的选取和外部接线息息相关。
IST指令有3个操作数,如下图21-1所示,其中源址S是多种工作方式的选择开关输入位元件起始地址,终址D1、D2分别为程序中一般状态继电器的最小编号和最大编号。其中源址的选取和外部接线息息相关。
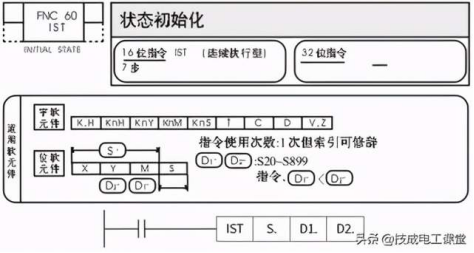
图21-1
一、IST指令的PLC外部接线
源址S是选择开关输入位元件起始地址,指的就是X输入口地址,占用连续的8个点,即S~S 7。这8个输入口功能分配有着相关的规定,如下图21-2所示。其中S~S4的开关功能恰好对应上篇文章所讲的各种工作方式。

图21-2
为了便于讲解外部接线,我们结合例子说明,如执行指令IST X0 S20 S40,此时PLC用于IST指令的输入口有X0~X7。显然,各种工作方式不可能执行,X0~X4不能接通,外部接线应选择旋转开关(选择开关)。手动工作方式应能单独控制各个负载设备的单独工作。



基于以上说明,我们就可以很快画出PLC的外部接线啦,如下图21-3所示。除了IST指令所指定的X0~X7输入口,手动操作工作方式下对各个负载设备的控制也用到了其他地址的输入口。当然,对于其他输入口的使用,没有相关规定,可以自由选择。但一旦选好这些输入口,梯形图的编写就得按这些输入口地址来。
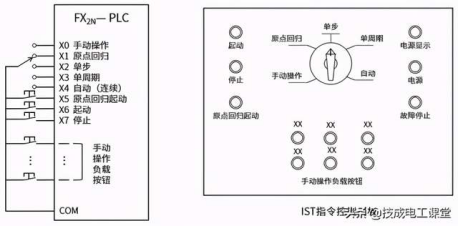
图21-3
IST指令的PLC外部接线与控制面板如图21-3所示,其几个工作内容如下:
(1)把旋转开关打到“原点回归”工作方式下,按下“原点回归起动”按钮,使系统做原点回归工作。
(2)把旋转开关打到“单步”工作方式下,按下“起动”按钮,每按一次该按钮,系统顺序前进一个工步(状态步)。
(3)把旋转开关打到“单周期”工作方式下,按下“起动”按钮,每按一次该按钮,系统完成一次顺序控制流程并回到原点停下。
(4)把旋转开关打到“自动”工作方式下,按下“起动”按钮,系统自动连续(循环)执行顺序控制流程,直到按下“停止”按钮,系统运行完最后一个周期并回到原点停下。
(5)把旋转开关打到“手动操作”工作方式下,按下手动操作负载按钮的各个XX按钮,就可以手动控制各个设备单独运行,例如控制电机的正转、控制电机的反转等。
(6)按下“电源”按钮,接通PLC;按下“停止”,断开PLC电源。
知道了IST指令的外部接线后,我们接着学习IST指令的SFC与梯形图。

二、IST指令的SFC与梯形图
结合上篇文章,在应用IST指令的基础下,多种工作方式编程的程序结构如下图21-4所示。公用程序为几种工作方式共用,手动操作程序为一个SFC,原点回归程序为一个SFC,单步、单周期和自动共为同一个SFC。
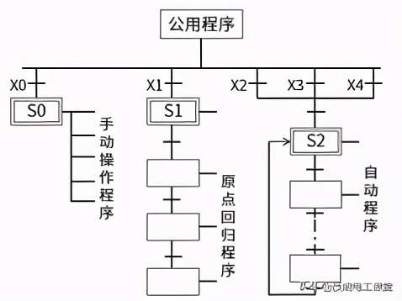
图21-4
基于图21-4,我们可以将整个梯形图分为4部分,每一部分都有着一定的特点,就让我们看看有哪些特点吧!
1、公用程序
如下图21-5所示为公用程序部分,上篇文章已经提过,M8044为原点标志特殊继电器,这段程序是用于判断机器设备是否处在原点位置,并作为自动方式的运行条件。第二行为输入IST指令。
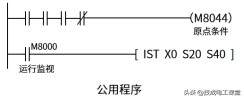
图21-5
2、手动操作程序
手动操作部分的程序也比较简单,其状态步只有初始状态步S0,因为其手动驱动各个负载设备的工作,其触点要和外部输入口地址一一对应。结合上篇文章的机器人跳舞例子,手动操作的SFC如下图21-6所示。
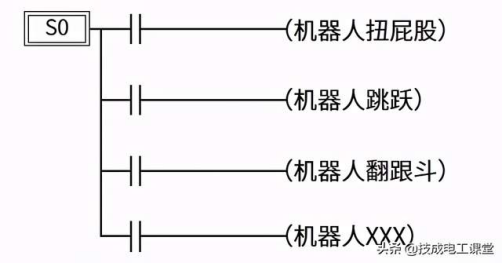
图21-6
3、原点回归程序
原点回归的SFC如下图21-7所示,其原点回归起动触点对应上文的输入口规定地址,如图21-7中的X5,随着IST指令中源址首地址的不同,该触点也不同。
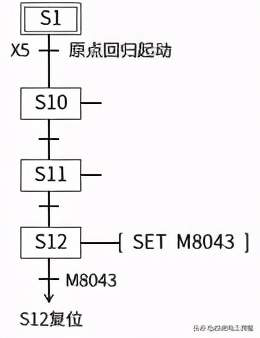
图21-7
结合上篇文章。原点回归程序中的一般状态步必须使用状态继电器S10~S19。在原点回归结束后,需在最后的状态步中驱动特殊继电器M8043(原点回归结束),并对最后的状态步进行复位,如上图21-7中的最后一步为S12,应用M8043对S12复位,即执行指令RST S12。上例中的最后一个状态步程序段如下图21-8所示。
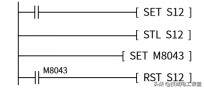
图21-8
如顺序控制流程中没有原点回归方式,图21-7所示的这段程序可以没有,但在自动运行前需要置位一次M8043。
4、自动程序
自动程序结构如下图21-9的(1)所示,其中M8041表示自动方式开始状态转移,M8044表示原点标志,这在上篇文章中已经提过。
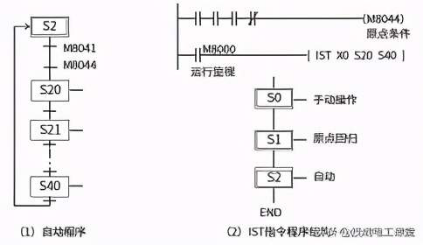
图21-9
所谓“自动程序”,显然是包括的单步、单周期和自动三种工作方式在内的,因为这3种工作方式的SFC相同,区别只在于控制方式上。
综上,IST指令的程序结构,我相信大家也已经比较清楚了,如图21-9所示的(2)为其结构展示。在知道基本机构的情况下,根据控制要求设计、编写完整的程序就会较为简单。
其完整的梯形图示例如下图21-10所示,其中各状态继电器的应用因人而异,但要按规定来选取,如原点回归方式的状态继电器为S10~S19等。
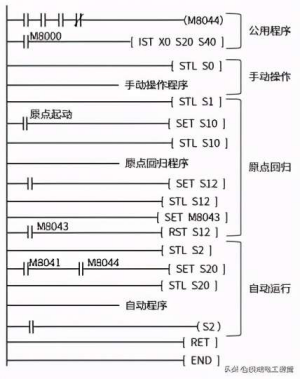
图21-10


三、IST指令使用的注意事项
IST指令在应用时,有几点要注意:
1、不连续地址的应用,其相关规定的编程手册截图如下图21-11所示。
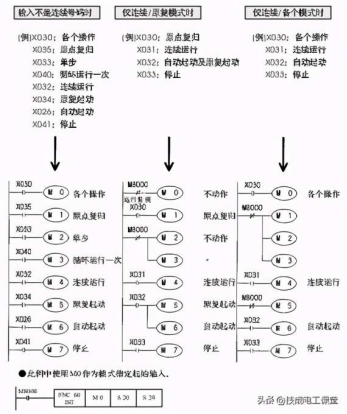
图21-11
如图21-11所示,若输入继电器X的地址不是连续的,可以在IST指令中指定源址S为辅助继电器M,如图中的M0~M7。当然,在指定辅助继电器时,也要注意X和M的对应关系,即和外部接线一一对应。
2、输入口X的占用
IST指令用于五种工作方式的切换,但在实际应用中并不一定全部需要五种方式,例如有的没有原点回归方式、有的没有手动操作方式等。在上文中提到,IST指令占用连续的8个输入口地址。不需要编写五种工作方式的程序,IST指令一旦指定源址S为X首地址,其连续的8个输入口均被占用,不能用于其他用处,例如执行指令IST X10 S20 S38,若此时没有原点回归方式,其X11输入口也被占用。

3、特殊辅助继电器M8043的使用
上文提到过,原点回归程序的结束要驱动特殊辅助继电器M8043为ON,这是必须要做的。若在原点回归结束后不驱动M8043,将会导致在各种工作方式之间切换时所有输出被复位的情况。
若没有原点回归方式,则在自动运行方式开始前需将M8043置ON一次。

4、工作方式的切换
在系统顺序控制的过程中,自动运行方式下单步、单周期、自动三种工作方式可以自由切换。在系统顺序控制的过程中,手动操作、原点回归、自动三种工作方式也可以通过旋转开关进行切换,但由于安全原因,在全部输出复位后,切换后工作方式才起效。
SMART模块西门子数字量模块西门子PLC模块代理商西门子电缆网线代理商西门子CPU模块代理商西门子模块代理商西门子电池代理商西门子内存卡代理商西门子变频器代理商西门子触摸屏代理商西门子电源模块代理商西门子DP电缆代理商