西门子AI/AO模块代理商西门子PLC模块代理商西门子电缆代理商
西门子AI模块6ES7531-7NF10-0AB0
西门子AI模块6ES7531-7QD00-0AB0
西门子AI模块6ES7531-7KF00-0AB0
西门子AI/AO模块6ES7534-7QE00-0AB0
西门子扩展模块6ES7532-5HF00-0AB0
西门子扩展模块6ES7532-5NB00-0AB0
(1) 西门子S7-200SMART系列PLC,CPU型号为ST20。
(2) XYZ轴平台一套,该平台有三个步进驱动器,三套电机配合丝杆,在本例子因ST20型号的CPU只支持2轴高速脉冲输出,只驱动X轴和Y轴。实验平台如下图所示:
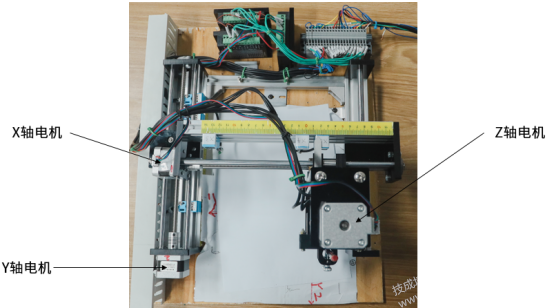
注:定义往电机方向移动为正方向,丝杆的逻辑为4mm,步进驱动的细分设置为3200个脉冲一转。
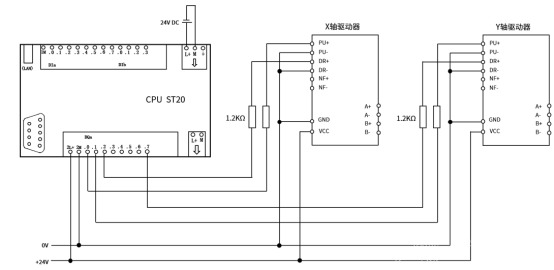
CPU输出端Q0.0和Q0.2分半为X轴的脉冲和方向信号,Q0.1和Q0.7位Y轴的脉冲和放信号,步进驱动器有PLC的接线图如下所示:
 二、 直线插补算法说明
二、 直线插补算法说明
如下图所示,原点,1#点,2#点,三点构成了一个三角形,若需要使用S7-200SMART系列PLC驱动前面所描述的XY轴实验平台画出来,则需要用到XY轴运动来实现走直线的功能,但S7-200SMART系列PLC没有直线插补功能,只能考虑自编程序来实现。
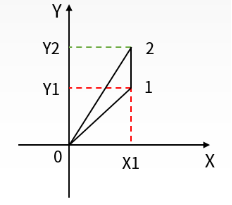
如上图所示,X轴和Y轴要从原点启动到1#点位置,则X轴和Y轴所移动的时间是相同的,已知目标位置的坐标及一个轴的速度(主站速度),根据已知的轴的位置和速度计算出时间后再去计算出一个轴的速度。根据此原则则可得到如下公式:

三、三角形移动程序设计说明
根据分析,对S7-200SMART系列PLC的驱动XY轴平台实现三角形运动的程序设计主要分为“运动向导的组态配置”、“初始化与回原点程序”、“速度换算程序”、“取juedui值程序”、“开始运行程序”几部分组成。



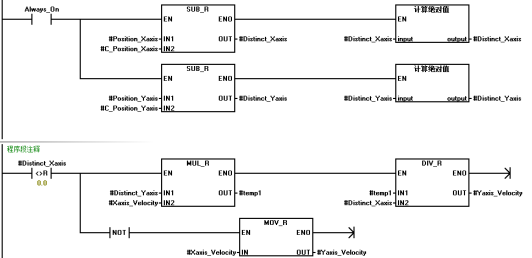
(1)速度换算程序
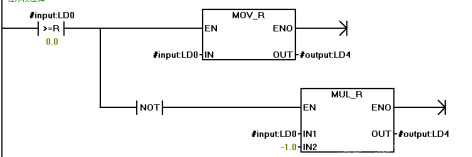
速度换算程序,根据给定的X轴的速度,计算出Y轴的速度,在输的计算中为了保证计算得到的速度值为正数,对目标位置减去当前位置后得到的结果去juedui值运算,还需要编写取juedui值的子程序。如下图所示,第一段程序为取juedui值运算的子程序,第二段为速度换算的子程序。
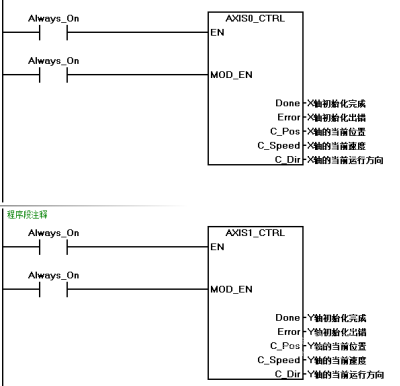
(2)初始化和回原点程序设计
对X轴和Y轴分别进行初始化,初始化程序如下图所示
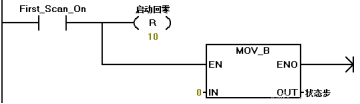
对X轴和Y轴分别心回原点操作,使画笔移动到原点位置
(3)编写走三角形运行程序
西门子AI/AO模块代理商西门子PLC模块代理商西门子电缆代理商西门子AI/AO模块代理商西门子PLC模块代理商西门子电缆代理商西门子AI/AO模块代理商西门子PLC模块代理商西门子电缆代理商
| 6ES7131-6BF01-0BA0 |
| 6ES7811-1CC05-0YA5 |
| 6ES7810-4CC08-0YA5 |
| 6AV2124-0QC02-0AX1 |
| 6ES7513-1AL02-0AB0 |
| 6GK5208-0BA00-2AB2 |
| 6ES7195-1GF30-0XA0 |
| 6ES7416-3FS06-0AB0 |