西门子S120电机驱动模块6SL3120-2TE15-0AD0
西门子模块的发展趋势:PLC从控制规模上来讲,向小型化和大型化两个方向发展,大型化主要用于满足大规模高性能控制系统,可带I/O点数可达到上万,小型化就是在保持甚至减少现有PLC的体积的情况下,程度的提高PLC的性能。PLC的性能分为CPU性能和I/O性能两个方面,而CPU性能又可以分为基本性能,逻辑运算能力和数据处理能力三个方面。而I/O性能有分为过程I/O,功能模块与系统接口三个部分,我们主要介绍I/O性能中的功能模块和系统接口。
功能模块体现的是PLC的功能扩展能力,功能模块是为满足各种不同控制要求的智能PLC控制模块,常见的智能模块有温度测量,温度调节,位置控制,通信模块,模糊逻辑控制模块,高速计数等功能模块,其以微处理器为核心,与PLC的CPU并行工作。而系统接口反映了PLC的集中控制与网络连接能力,表示的是与其他PLC或者计算机以及其他数字设备的通信能力,一般PLC都具备其自己的专有通信接口(比如西门子的PPI通信接口),还有就是通用的自由通信接口(比如RS-485通信接口以及以太网通信接口)。
综合来讲,PLC的发展趋势有四个方向:1,发展智能模块,上文所述,针对不同控制要求开发出各种智能模块,与PLC的CPU并行工作。2,高可靠性,现在PLC发展冗余容错技术以及模块的热插拔技术,采用自诊断技术,及时向客户提供故障分析的信息方便维护,保证PLC能够长时间无差错运行。3.编程软件标准化,西门子模块厂家各自为战,相互封闭,软硬件相互之间不兼容,客户在使用上非常不方便,IEC制定出IEC1131标准,引导PLC向标准化发展,大多数厂家都退出了符合IEC 1131-3标准的软件系统。4.网络化,随着现场总线技术的应用,多个PLC之间通信以及人机界面,编程设相互连接的网络,与工业计算机以及工业以太网构成工业自动化控制系统,PLC的控制网络主要有I/O网,设备内部网以及系统网,I/O网是PLC与远程I/O模块之间的联网,实质上是PLC的I/O连接范围的扩展和延伸,可以节省大量的连接线缆及导线,又称之为“省配线网”(大多I/O网的连接是采用现场总线技术,比如RS-485总线),在此有点类似于控制系统中的现场设备层,设备内部网是指PLC与变频器,现场控制设备,伺服驱动器以及温湿度控制装置之间的连接网络都属于设备内部网,在此其有点类似于控制系统中的过程监控层,(设备内部网的连接采用现场总线以及工业以太网作为通信线路)。系统网指的是现场多台设备,多个控制装置的互联,通过通信手段对现场的多个独立的设备以及控制装置(包括PLC)进行集中统一管理,构成FMC(柔性制造单元),FMS(柔性制造系统),CIMS(计算机现代集成制造系统)等工厂自动化控制系统。
附录I:通用十条标准 该标准奠定了PLC的各方面特点,以后的PLC基本上都是遵循以下特点设计生产:1. 编程方便,现场可修改程序。2.维修方便,采用模块化结构,**是插件式。3.可靠性高于继电器控制装置。4.体积小于继电器控制装置。5.数据可直接送入计算机。6.成本可与继电器控制装置竞争。7.在扩展时,原系统只要很小变更。8.用户程序存储器容量能扩展,至少要扩展至4KB。9.输入可以是交流115V。10.输出驱动能力为交流115V,2A以上,能直接驱动电磁阀,接触器等。

PPI协议是S7-200CPU基本的通信,通过原来自身的端口(PORT0或PORT1)就可以实现通信,是S7-200 CPU默认的通信。
二、RS485串口通讯
第三方设备大部分支持,西门子S7 PLC可以通过选择口通信控制串口通信。的情况是只用发送指令(XMT)向打印机或者变频器等第三方设备发送信息。不管任何情况,都通过S7 PLC编写程序实现。
当选择了口,用户可以通过发送指令(XMT)、接收指令(RCV)、发送中断、接收中断来控制通信口的操作。
三、MPI通讯
MPI通信是一种比较简单的通信,MPI网络通信的速率是19.2Kbit/s~12Mbit/s,MPI网络多支持连接32个节点,大通信距离为50M。通信距远,还可以通过中继器扩展通信距离,但中继器也占用节点。
MPI网络节点通常可以挂S7-200、人机介面、编程设备、智能型ET200S及RS485中继器等网络元器件。
西门子PLC与PLC之间的MPI通信一般有3种通信:
1、全局数据包通信
2、无组态连接通信
3、 硬件滤波及软件抗如果措施
由于电磁干扰的复杂性,要根本消除迎接干扰影响是不可能的,在PLC控制系统的软件设计和组态时,还应在软件方面进行抗干扰处理,提高系统的可靠性。常用的一些措施:数字滤波和工频整形采样,可有效消除周期性干扰;定时校正参考点电位,并采用动态零点,可有效防止电位漂移;采用信息冗余技术,设计相应的软件标志位;采用间接跳转,设置软件陷阱等提高软件结构可靠性。
信号在接入计算机前,在信号线与地间并接电容,以减少共模干扰;在信号两极间加装滤波器可减少差模干扰。
对干较低信噪比的模拟量信号.常因现场瞬时干扰而产生较大波动,若仅用瞬时采样植进行控制计算会产生较大误差,为此可采用数字滤波方法。
现场模拟量信号经A/D转换后变成离散的数字信号,将形成的数据按时间序列存入PLC内存。再利用数字滤波程序对其进行处理,滤去噪声部分获得单纯信号, 可对输入信号用m次采样值的平均值来代替当前值,但井不是通常的每采样。次求一次平均值,而是每采样一次就与近的m-l次历史采样值相加,此方法反应速度快,具有很好的实时性,输入信号经过处理后用干信号显示或回路调节,有效地抑制了噪声干扰。
由干工业环境恶劣,干扰信号较多, I/ O信号传送距离较长,常常会使传送的信号有误。为提高系统运行的可靠性,使PLC在信号出错倩况下能及时发现错误,并能排除错误的影响继续工作,在程序编制中可采用软件容错技术。
4、正确选择接地点,完善接地系统
接地的目的通常有两个,其一为了安全,其二是为了抑制干扰。完善的接地系统是PLC控制系统抗电磁干扰的重要措施之一。
系统接地方式有:浮地方式、直接接地方式和电容接地三种方式。对PLC控制系统而言,它属高速低电平控制装置,应采用直接接地方式。由于信号电缆分布电容和输入装置滤波等的影响,装置之间的信号交换频率一般都低于1MHz,PLC控制系统接地线采用一点接地和串联一点接地方式。集中布置的PLC系统适于并联一点接地方式,各装置的柜体中心接地点以单独的接地线引向接地极。如果装置间距较大,应采用串联一点接地方式。用一根大截面铜母线(或绝缘电缆)连接各装置的柜体中心接地点,将接地母线直接连接接地极。接地线采用截面大于22 mm2的铜导线,总母线使用截面大于60mm2的铜排。接地极的接地电阻小于2Ω,接地在距建筑物10 ~ 15m远处(或与控制器间不大于50m),PLC系统接地点必须与强电设备接地点相距10m以上。
3、组态连接通信
四、以太网通讯
以太网的核心思想是使用共享的公共传输通道,这个思想早在1968年来源于厦威尔大学。 1972年,Metcalfe和Did Boggs(两个都是网络专家)设置了一套网络,这套网络把不同的ALTO计算机连接在一起,还连接了EARS激光打印机。这就是上一个个人计算机局域网,这个网络在1973年5月22日运行。Metcalfe在运行这天写了一段备忘录,备忘录的意思是把该网络改名为以太网(Ethernet),其灵感来自于“电磁辐射是可以通过发光的以太来传播”这一想法。 1979年,DEC、Intel和Xerox共同将网络化。
1984年,出现了细电缆以太网产品,后来陆续出现了粗电缆、双绞线、CATV同轴电缆、光缆及多种媒体的混合以太网产品。 以太网是目前上的拓朴之一,具有传传播速率高、网络资源丰富、功能强、安装简单和使用方便等很多优点。
五、PROFIBUS-DP通讯
PROFIBUS-DP现场总线是一种开放式现场总线,符合欧洲和。PROFIBUS-DP通信的结构非常精简,传输速度很高且,非常适合PLC与现场分散的I/O设备之间的通信。宜昌西门子S7-300DI模块代理商现货供应 中新网扬州8月17日电 (记者 崔佳明)以“科创驱动,智造未来”为主题的“创客”智能制造中小企业创新创业大赛17日在江苏扬州启动,大赛面向智能制造领域的中小企业和创客,即日起至8月31日符合条件的企业和创客通过“创客”大赛报名参赛。 中新网8月22日电 22日,碧桂园控股有限公司(02007.HK)(以下简称“碧桂园”)2019年中期业绩报告,集团于上半年继续录得经营业绩的快速增长。
1 引言 2 PLC实现PID的控制方式 3 PLC-PID控制器的实现
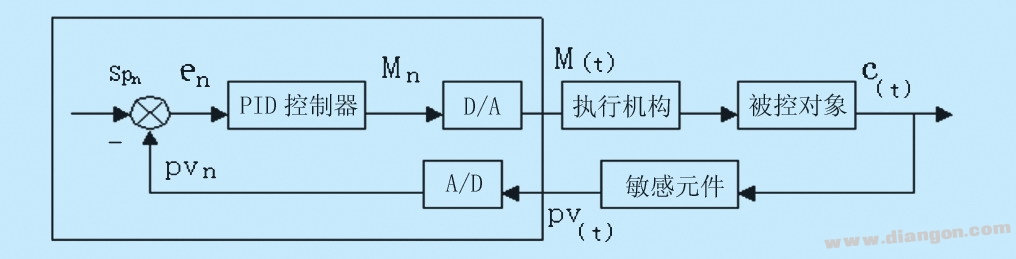
M(t)—控制器的输出量,M0为输出的初始值; e(t)=sp(t)-pv(t)-误差信号; KC比例系数; TI-积分时间常数; TD-微分时间常数。
图1 连续闭环控制系统方框图
式中:
图2 PLC闭环控制系统方框图 在许多控制系统内,可能只需要P、I、D中的一种或两种控制类型。如可能只要求比例控制或比例与积分控制,通过设置参数可对回路进行控制类型进行选择。 3.3 回路输入的转换
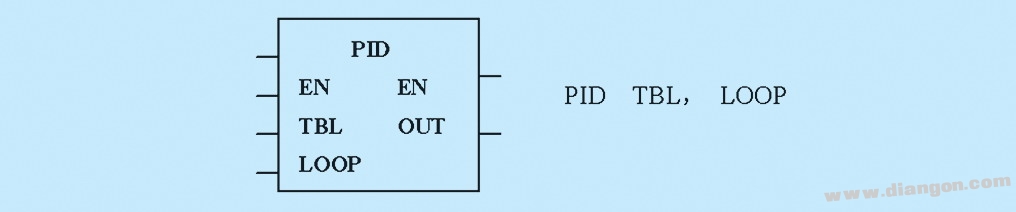
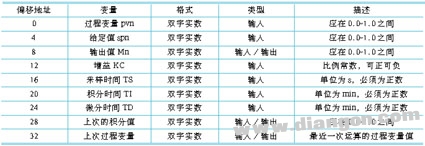
图3 PID指令 指令中TBL是回路表的起始地址,LOOP是回路的编号。编译时如果指令指定的回路表起始地址或回路号超出范围,CPU将生成编译错误(范围错误)仪器编译失败。PID指令对回路表中的某些输入值不进行范围检查,应保证过程变量、给定值等不超限。回路表参见附表。 附表 PID指令的回路表
如果PID指令中的算术运算发生错误,特殊存储器SMI.1(溢出或非法数值)被置1,并将终止PID指令的执行。要想消除错误,在下次执行PID运算之前,应改变引起运算错误的输入值,而不是更新输出值。 4 PID指令编程举例 5 结束语 |