西门子驱动6SL3120-1TE21-0AA4
CPU 的工作模式
CPU 有以下三种工作模式:STOP 模式、STARTUP 模式和 RUN 模式。CPU 前面的状态 LED 指示当前工作模式。
在 STOP 模式下,CPU 不执行程序。您可以下载项目。
在 STARTUP 模式下,执行一次启动 OB(如果存在)。在启动模式下,CPU 不会处理中断事件。
在 RUN 模式,程序循环 OB 重复执行。可能发生中断事件,并在 RUN 模式中的任意点执行相应的中断事件 OB。可在 RUN 模式下下载项目的某些部分。
CPU 支持通过暖启动进入 RUN 模式。暖启动不包括储存器复位。执行暖启动时,CPU 会初始化所有的非保持性系统和用户数据,并保留所有保持性用户数据值。
存储器复位将清除所有工作存储器、保持性及非保持性存储区、将装载存储器复制到工作存储器并将输出设置为组态的“对 CPU STOP 的响应”(Reaction to CPU STOP)。存储器复位不会清除诊断缓冲区,也不会清除保存的 IP 地址值。
可组态 CPU 中“上电后启动”(startup after POWER ON) 设置。该组态项出现在 CPU“设备组态”(Device Configuration) 的“启动”(Startup) 下。通电后,CPU 将执行一系列上电诊断检查和系统初始化操作。在系统初始化过程中,CPU 将删除所有非保持性位 (M) 存储器,并将所有非保持性 DB 的内容复位为装载存储器的初始值。CPU 将保留保持性位 (M) 存储器和保持性 DB 的内容,进入相应的工作模式。检测到的某些错误会阻止 CPU 进入 RUN 模式。CPU 支持以下组态选项:
不重新启动(保持为 STOP 模式)
暖启动 - RUN 模式
暖启动 - 断电前的模式
注意 可修复故障可使 CPU 进入 STOP 模式。 CPU 因可修复故障或临时故障可能会进入 STOP 模式,前者如可替换信号模块故障,后者如电力线干扰或不稳定上电事件。这种情况可导致财产损失。 如果已将 CPU 组态为“暖启动 - 断电前的模式”(Warm restart - mode prior to POWER OFF),CPU 则在掉电或发生故障前进入工作模式。如果在发生掉电或故障时,CPU 处于 STOP 模式,则 CPU 将在上电时进入 STOP 模式并保持 STOP 模式,直至收到进入 RUN 模式的命令。如果在发生掉电或故障时,CPU 处于 RUN 模式,则在未检测到可禁止 CPU 进入 RUN 模式的条件下,CPU 将在下次上电时进入 RUN 模式。 要使 CPU 在下一次循环上电时返回到 RUN 模式,可将欲独立于 STEP 7 连接而运行的 CPU 组态为“暖启动 - RUN”(Warm restart - RUN)。 |
可以使用编程软件在线工具中的“STOP”或“RUN”命令更改当前工作模式。也可在程序中包含 STP 指令,以使 CPU 切换到 STOP 模式。这样就可以根据程序逻辑停止程序的执行。
在 STOP 模式下,CPU 处理所有通信请求(如果适用)并执行自诊断。CPU 不执行用户程序,过程映像也不会自动更新。
在 STARTUP 和 RUN 模式下,CPU 执行下图所示的任务:
| STARTUP | RUN | ||
| A | 清除 I(映像)存储区 | ① | 将 Q 存储器写入物理输出 |
| B | 根据组态情况将 Q 输出(映像)存储区初始化为零、上一值或替换值,并将 PB、PN 和 AS-i 输出设为零 | ② | 将物理输入的状态复制到 I 存储器 |
| C | 将非保持性 M 存储器和数据块初始化为其初始值,并启用组态的循环中断事件和时钟事件。 执行启动 OB。 | ③ | 执行程序循环 OB |
| D | 将物理输入的状态复制到 I 存储器 | ④ | 执行自检诊断 |
| E | 将所有中断事件存储到要在进入 RUN 模式后处理的队列中 | ⑤ | 在扫描周期的任何阶段处理中断和通信 |
| F | 启用 Q 存储器到物理输出的写入操作 | ||
启动过程
只要工作模式从 STOP 切换到 RUN,CPU 就会清除过程映像输入、初始化过程映像输出并处理启动 OB。通过“启动 OB”中的指令对过程映像输入进行任何的读访问,都只会读取零值,而不是读取当前物理输入值。要在启动模式下读取物理输入的当前状态,必须执行立即读取操作。接着再执行启动 OB 以及任何相关的 FC 和 FB。如果存在多个启动 OB,则按照 OB 编号依次执行各启动 OB,OB 编号小的先执行。
每个启动 OB 都包含帮助您确定保持性数据和时钟有效性的启动信息。可以在启动 OB 中编写指令,以检查这些启动值,从而采取适当的措施。启动 OB 支持以下启动位置:
PROFIBUS DP系统组态可分为带DP口的主站系统,采用通讯模板CP的主站系统以及带智能从站的DP系统。三种DP系统中带DP口的主站系统,采用通讯模板CP的主站系统在硬件组态时基本相同。
1. PROFIBUS DP系统之一:带DP口的主/从系统
带DP口的主/从系统设计十分灵活,它允许用CPU中不同的数据区域来储存DP过程数据。对数据区域的选择取决于CPU的类型和应用。过程映像区,位存储器以及数据块都可用于DP输入,输出数据。
过程映像是标准的数据分配。在CPU的过程映像中须有充分的空间为DP保留一个连续的输入区域和一个连续的输出区域。这可能受中央配置中过程映像大小和信号模块数量的限制。
位存储器与过程映像相同,这个区域适合于DP信号的全局存储。例如,如果过程映像可利用的空间(没有被中央信号模块占据的空间)不够用,则可以使用位存储区。
数据块也可以用来存储DP信号有关的DP数据区只被一个程序调用时使用这种存储。
F
F 在PROFIBUS总线上添加ET-200 从站:
主站/从站的I/O地址不能重复,它是由系统软件分配的。如果用户需要对地址进行修改,可以通过模板特性对话框重新设置。
2.PROFIBUS DP系统之二:带通讯模板CP的主站系统。
采用通讯模板CP的主站/从站系统,则主站/从站的I/O地址可以重复,因为此时的PLC系统相当于两个CPU。用户可以通过模板特性对话框任意设置I/O地址,只是主站或从站内的I/O地址不能重复。
当配置CP时,必须设定操作模式。(Operating Mode)
CP342-5 DP总是需要DP-SEND和DP-RECV。这些组块通过底板总线在CPU和CP之间转移数据.
CP342-5的数据总是连续地传输。主站大数据长度是240字节,从站大数据长度是86字节。
DP-SEND(发送)将CPU中的的DP数据区的数据发送到PROFIBUS CP的发送缓冲器,以便传送给DP从站;DP-RECV(接收)从DP从站中读出数据,将PROFIBUSCP接收缓冲区的数据放入CPU的DP数据区中。

西门子变频器基本知识
1、什么是变频器?
变频器是利用电力半导体器件的通断作用将工频电源变换为另一频率的电能控制装置。
2、PWM和PAM的不同点是什么?
PWM是英文Pulse Width Modulation(脉冲宽度调制)缩写,按一定规律改变脉冲列的脉冲宽度,以调节输出量和波形的一种调值方式。
PAM是英文Pulse Amplitude Modulation (脉冲幅度调制) 缩写,是按一定规律改变脉冲列的脉冲幅度,以调节输出量值和波形的一种调制方式。

1.特殊存储器区
它是S7-200PLC为保存自身工作状态数据而建立的一个存储区,用SM表示。特殊存储器区的数据有些是可读可写的,有一些是只读的。特殊存储器区的数据可以是位,也可是字节、字或双字。
(1)按“位”方式:从SM0.0~SM179.7,共有1440点。
(2)按“字节”方式:从SM0~SM179,共有180个字节
(3)按“字”方式:从SMW0~SMW178,共有90个字
(4)按“双字”方式:从SMD0~SMD176,共有45个双字
说明:特殊存储器区的头30个字节为只读区。
2.常用的特殊继电器及其功能
特殊存储器用于CPU与用户之间交换信息,例如SM0.0一直为“1”状态,SM0.1仅在执行用户程序的第1个扫描周期为“1”状态。SM0.4和 SM0.5分别提供周期为1min和1s的时钟脉冲。SM1.0、 SM1.1和 SM1.2分别是零标志、溢出标志和负数标志。

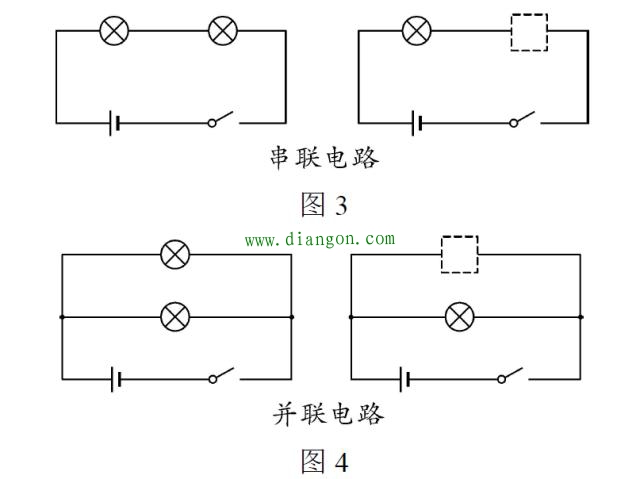
| 初中物理学科中,电学是*简单也是*难的一部分,简单的原因是如果弄明白了电路图,就会做所有的题目,难的原因是没明白电路图,就什么都不会。 解电学的关键就是学会区分串、并联电路,知道串、并联电路的特点,会分析电路图,会将复杂的电路图简化为简单的串、并联电路。 本期就给大家介绍几种串、并联电路的识别方法。一起来学习吧! 串联电路 定义:两个或两个以上的用电器顺次连接到电路中,这种连接方式叫做串联。(用电器“首尾相连”)
|