西门子电源6SL3130-6AE15-0AB1详细说明
均在Step7Template.mwp中编写,CPU类型选西门子S7—200系列226CN。
先说程序,测低速(每分钟1000转以下):LDI0.0
LDM20.1
CTUC0,+5000//设定增计数器上限
L***0.0
AM20.0
TONT37,+30//立即接通,延时三秒断开
L***0.0
OM20.0#p#分页标题#e#
ANT37
=M20.0//设定T37定时器复位信号
LDM20.0
LDM20.1
CTUC1,+20//设定增计数器C1上限
LDC1
MOVWC0,VW200
=M20.2
LDM20.2=M20.1//设定增计数器C1的复位信号
外围电路下面介绍,先讲程序。由I0.0作输入口,T37延时三秒后给C1一个信号,C1计1,T37被复位,再延时,3秒后C1计2,…
直到C1计到20。20个三秒就是一分钟,期间I0.0口的脉冲信号由C0计数器计数,计满一分钟就把结果移到VW200中。脉冲信号由外围电路得到。
以上程序能测一千以下的转速,实验时上限是一千四百多吧。由于该程序用的是低速计数器,转速较高时,受PLC时钟周期影响,在一分钟时转速还未记好,C0就被清零,会有上限。我们用PLC内部不受时钟周期影响的高速计数器来测高速(一千转以上):
L***0.1
CALLSBR_0//调用高速计数器初始化子程序
L***0.0
AM20.0
TONT37,+100//设定计时器值,延时10秒
L***0.0
OM20.0ANT37
=M20.0//立即接通延时十秒断开
LDT37
MOVDHC0,VD100//I0.0为高速计数器HC0输入口,计数结果移入VD100
MOVDVD100,VD200
MUL+6,VD200//计数结果乘以6,放入VD200
LDT37
CALLSBR_0//T37计时到,调用高速计数器初始化子程序
SBR_0//高速计数器初始化子程序#p#分页标题#e#
L***0.0
MOVB16#F8,SMB37//设置控制位:增计数;已使能;
MOVD+0,SMD38//装载CV
MOVD+0,SMD42//装载PV
HDEF0,0
HSC0
以上程序测速范围为1000转以上,实验时测得zui高为2500+,因实验条件有限,上限未知。有人会有疑问:你怎么采用的是测10秒,将计数结果乘以6当做一分钟的转速,而不直接测一分钟的转速呢?因为转速结果zui后要用数码管显示出来,对观察者来说,10秒以后显示与一分钟后显示相比,前者更好一些。zui后我们采用的是6乘以10的策略。
zui后来说说外围电路吧。外围电路把转速转换成脉冲信号输入PLC,上面两段程序用的都是I0.0口。信号的转换和采集用霍尔传感器,

接法如图:VCC接24V,GND接电源负极,A接信号输入端I0.0,A端和24V间接电阻。接好后将霍尔元件平的一面朝被测物体固定好,如一个轮子,在轮子面上霍尔对应位置安装霍尔磁体。测速原理:轮子每转一圈,磁体和霍尔元件接触一次(其实是接近),它们接触时带来A端电压的降低,由此给PLC一个脉冲信号。磁体和霍尔之间间距3至5mm。安装时注意磁体的正反面。
好了,测转速就先说这么多。经过以上这些,测得的数据只是放在PLC的内存里,我们可以在软件里监测PLC运行情况,看到这些数据。是不是有点麻烦,有没有更好的方法能看到这些数据?当然,可以用LED数码管来把数据显示出来
3.在TIA 博途中添加库文件,并将库中的Easy_SINA_Pos功能块拖拽到左侧"程序块"中

4.在OB1中调用Easy_SINA_Pos功能块,为功能块各参数添加变量:

注意:对功能块参数HWI DSTW及HWI DSZW的赋值可以通过点击参数,在下拉菜单中选择对应的西门子报文111选项。
也可以参看下图,在设备视图的报文属性中查询硬件标识符的数值:

5. FB38002功能块输入输出参数说明
| ModePos | INT | 运行模式: 1 = 相对定位 2 = 定位 4 = 主动回零 7 = 按速度点动 |
| EnableAxis | BOOL | 伺服运行命令: 0 = 停止(OFF1) 1 = 启动 |
| Jog1 | BOOL | 点动信号1 |
| Jog2 | BOOL | 点动信号2 |
| MDIPosition | DINT | MDI运行模式下的位置设定值[LU] |
| MDIVelocity | DINT | MDI运行模式时的速度设定值[1000LU/min] |
| ExecuteMode | BOOL | 激活请求的模式 |
| RefCamInput | BOOL | 回零开关信号 |
| RefDirection | BOOL | 选择回零开始的方向: 0 = 正向寻零 1 = 反方向寻零 |
| AckError | BOOL | 故障复位 |
| HWLimitEnable | BOOL | 激活硬件限位开关: 1 = 激活 |
| SWLimitEnable | BOOL | 激活软件限位开关: 1 = 激活 |
| HWIDSTW | HW_IO | 符号名或SIMATIC S7-1x00设定值槽的HW ID |
| HWIDSTW | HW_IO | 符号名或SIMATIC S7-1x00设定值槽的HW ID |
S7-1500PLC的常用模块,S7-1500PLC是模块化结构设计的PLC,各个单独模块之间可以进行广泛组合和扩展,它的主要组成部分有电源模块(PM/PS)、*处理器模块(CPU)、导轨(RACK)、信号模块(SM)、通信模块(CP/CM)和工艺模块(TM)等。
(1)、电源模块(PM/PS)
用于向CPU以及其扩展模块提供+24V DC电源。
PM:无背板总线、不占用槽位,无固件版本(类似PS307)PS:有背板总线,占用槽位,有固件版本(类似PS407)
(2)、*处理器模块(CPU)
主要包括以下几种
标准CPU(比如:CPU1511-1PN)紧凑型CPU(比如:CPU1512C-1PN)分布式模块CPU(比如:CPU1510SP-1PN工艺型CPU(比如:CPU1511T-1PN)故障安全CPU模块(比如:CPU1511F-1PN)通过标红的字母可以区分是什么类型的CPU
(3)、导轨(RACK)
是安装S7-1500各类模块的机架,是特制的异形板,标准长度为160/245...2000,可以根据实际选用。S7-300/1200/1500的导轨上无背板总线。但S7-400有背板总线,*。
(4)、存储卡(SD)
用于存储PLC程序,可由PC直接读取,不支持热插拔。50万次读取寿命,大32GB
注:S7-300的MMC,PC不能直接读取需用准用读卡器设备。
(5)、信号模块(SM)
是数字量I/O模块和模拟量I/O模块的总称。信号模块主要有SM521(数字量输入)、SM522(数字量输出)、混合模块SM523、SM531(模拟量输入)、SM532(模拟量输出)和混合模块SM534。
基本型:BA标准型:ST高性能:HF(6)、工艺模块(TM)
主要用于对实时性和存储量要求高的控制任务。
计数模块(高速输入):TM Count2位置检测模块(高速输入):TM Poslnput2PTO模块(高速输出):TM PTO(7)、通信模块(CP/CM)
用于PLC之间、PLC与计算机和其他智能设备之间的通信,可将PLC接入以太网、PROFIBUS和AS-I网络,或用于串行通信。它可以减轻CPU处理通信的负担,并减少对通信功能的编程工作。
主要有两大类:
PRIFIBUS:CM 1542-5、CP1542-5PROFINET:CM 1542-1、CP1543-1(8)ET-200分布式外围设备模块
是西门子基于PRIFIBUS或PROFINET的分布式控制模块,应用很广。
1、ET200SP:是一种多功能的按位模块化的分布式I/O系统,体积比较小,要安装在控制柜里。
2、ET200MP:是一种多通道的分布式I/O系统,可以使用S7-1500的模块,要安装在控制柜内,使用广泛。
西门子6ES7522-1BL10-0AA0
变频器与软启动器的区别和联系变频器和软启动器其实是俩种*不同用途的产品。变频器主要用在电机调速的地方,变频器拥有软启动器以及其他启动器的性能的在启动特性上较其他的启动器装置也有很大的优势。西门子PLC维修方法有哪些。由于这些控制和监视的要求,使PLC发展成了取代继电器线路和进行顺序控制为主的产品。PLC厂家在原来CPU模板上逐渐增加了各种通讯接口,现场总线技术及以太网技术也同步发展,使PLC的应用范围越来越广泛。

西门子在制造工业中存在大量的开关量为主的开环的顺序控制,它按照逻辑条件进行顺序动作号按照时序动作;还有与顺序、时序无关的按照逻辑关系进行连锁保护动作的控制;以及大量的开关量、脉冲量、计时、计数器、模拟量的越限报警等状态量为主的-离散量的数据采集监视
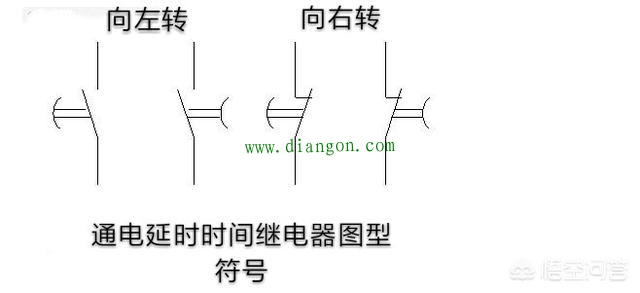
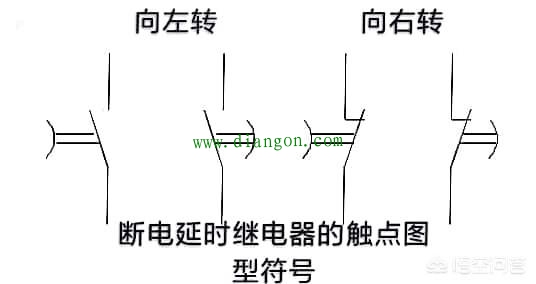
| 断电延时时间继电器的触点,是在继电器通电工作后触点动作,继电器断电后,延时时间到达预置设定的时间触点恢复原始状态。 通电延时时间继电器的触点,在继电器通电工作后,延时时间到达设定的时间触点动作。继电器断电后触点恢复原始状态。
|