西门子电机6SL3120-1TE23-0AA4详细说明
西门子V90伺服驱动器产品亮点:
一、高性价比
作为西门子发布的一款标准型产品,西门子V90伺服驱动器驱动器将多种控制模式集于一体,支持外部脉冲位置控制、内部设定值位置控制、速度和扭矩控制,适用于多样化的应用场合。全功率驱动器(0.4-7kW)还标配内置制动电阻。西门子V90伺服驱动器丰富且高度集成的模式,使其具有更高的性价比。
二、伺服性能优化
通过实时参数自动优化和自动谐振抑制功能,西门子V90伺服驱动器能够兼顾设备平滑运行和高动态性能。它还支1MHz脉冲输入和20位高分辨率值编码器,充分保证了高精度定位,降低低速脉动。伺服电机的3倍过载能力,以及驱动器与电机的匹配,保证了更为优化的伺服性能,提高机器生产率和稳定性。
三、操作简便
西门子V90伺服驱动器在设计上充分考虑了产品易用性,采用直观简洁的SinamicsV-Assistant调试工具,方便快捷地实现参数设定、试运行、排障和监控等功能。西门子V90伺服驱动器提供丰富全面的接口,能满足多种应用需求;双通道脉冲接口可以便捷地实现驱动器与PLC或运动控制器的连接;端子在提供默认参数分配的基础上支持接口自定义,保证标准应用方便性的也为特殊应用提供了灵活性。
四、运行可靠
西门子V90伺服驱动器采用高品质的PCB涂层,与之配套的SimoticsS-1FL6电机具有IP65防护等级,电机轴伸端标配油封。电缆连接口采用坚固的金属接头,确保驱动系统在严苛环境中也能稳定可靠地平稳运行。集成安全扭矩停止功能(STO)能更好的确保机器和操作人员的安全。
伺服系统:是一个闭环控制系统。变频器通常工作于开环控制,从速度还是精度上,变频器都无法和伺服相比。变频电机只是伺服电机的一个部分,伺服电机是在变频电机的基础上进行闭环的控制从而达到更理想的效果。 西门子公司不同类型的变频,传动,伺服,西门子备件产品用户可以根据自己的实际工艺要求和运用场合选择的型号订货。
是销量较大的控制器。应用范围。S7-200、S7-200CN、S7-200Smart、S7-300、S7-400、S7-1200触摸屏、变频器、伺服电机、数控系统、开关电源,在*一个实例中,SIMATIC S7-用于制造工艺中的创新性系统解决方案。特别是用于汽车工业,一般机械工程,特别是特殊机械制造和机器的连续生产 (OEM),以及塑料加工、包装行业、食品和饮料工业和加工工程,作为一种多用的自动化系统。S7-是那些需要灵活的设计以实现集中和本地组态的应用的理想解决方案。对于由于环境条件限制需要特殊的坚固性的应用。
脉冲输出方式
和FB41不同,FB58中集成有脉宽调制输出的功能,通过将PID的运算结果换算成对应的脉冲占空比来达到加热/冷却的控制。
在FB58的脉冲输出环节中涉及到的关键参数有:
PULSE_ON:脉冲输出使能;
PER_TM:输出脉冲的周期时间;
CYCLE_P:脉冲输出的刷新时间,推荐PER_TM/CYCLE_P>50,即将周期时间分为时间长度为CYCLE_P的“片",在每个CYCLE_P时间间隔里,脉冲输出单元运算一次以判断下一个CYCLE_P中应该输出高电平还是低电平,PER_TM和CYCLE_P的比值越大,说明输出脉冲的精度就也高;
P_B_TM:小脉冲/小断开时间。例如当PID的计算输出接近于100.0时,那么输出的脉冲中低电平时间接近于0,针对执行机构而言,其需要在极短的时间里关断,再打开,这会严重缩短设备的工作寿命,为此,通过设置小脉冲断开/脉冲时间就可以避免此问题。当需要输出的高电平时间小于P_B_TM时,则不会输出这个高电平;当需要输出的高电平时间大于周期时间PER_TM-P_B_TM时,则整个周期都输出高电平。P_B_TM设置的过长,可以降低对执行机构的冲击,但会影响输出脉冲和整个回路的控制精度;设置的过短,则对执行机构不利。

图11 脉冲输出
如上图所示,LmnN为PID的运算结果,通过和脉冲周期时间PER_TM相乘得到高电平的输出时间:
脉宽=LmnN*PER_TM/100
脉冲输出单元每次执行都累加一个CYCLE_P,通过判断累加值和脉宽,或者和周期与脉宽差值的比较来改变输出点的状态。
3.2.1 脉冲输出和PID运算
在FB58中,脉冲输出和PID计算是两个相对独立的过程,各自有自己的计算周期。对于PID计算来说,CYCLE参数可以看成是PID计算的循环周期时间,例如PID在OB35每次执行过程中都会被调用,而硬件组态过程中OB35的周期时间被设置成了500ms,则CYCLE应该填写为0.5。对于脉冲输出来说,其循环周期时间是CYCLE_P。这两个时间参数可以一样,也可以不一样。PID的计算周期主要由被测量的变化规律决定的,而脉冲输出的CYCLE_P参数由要求的脉冲输出精度决定。
为了协调PID和脉冲输出之间的矛盾,FB58提供了“SELECT"参数,其具体使用如下所示:
根据上表描述,FB58的调用可以有如下三种情况:
(1)SELECT=0,FB58只在周期中断OB(例如OB35)中调用
此时的参数配置应该将CYCLE_P和周期中断OB的中断时间保持一致。因为PID计算的执行条件是CYCLE_P的累计值和CYCLE参数一致,而脉冲输出周期PER_TM则应该CYCLE_P的整数倍,和CYCLE无关。
例如,在OB35中调用FB58,OB35的周期时间为50ms,FB58中的CYCLE_P是0.05s,CYCLE是1.0s,PER_TM是3.0s。
观察参数之间的关系,CYCLE是CYCLE_P的20倍,即OB35每20个周期执行一次FB58里的PID计算,而输出的脉冲周期是3秒钟。
(2)FB58分别在OB1和周期中断OB(例如OB35)中调用
在两个OB块中调用的FB58使用同样的背景数据块和参数,只是SELECT参数有所不同,在OB1中调用,SELECT设置为1;在周期中断OB中调用,SELECT设置为2。为了缩短OB1执行时间,可以通过FB58背景数据块中的“QC_ACT"来选择是否执行FB58,当QC_ACT为TRUE时,执行,否则跳过。
在这种方式下,处理原理同(1)一致,不同的是PID运算总是在OB1中执行罢了。OB1的执行周期对PID运算、脉冲输出均没有影响。
(3)FB58在两个不同周期时间的周期中断OB(例如OB32和OB35)中调用
FB58分别在两个周期中断OB中调用,其中周期时间长的OB中调用的FB58的SELECT参数设置为3,时间短的设置为2。
同前面两种情况不一样,SELECT选择为3时,PID的运算只和调用周期有关。例如OB32定义的周期时间是1000ms,OB35的周期时间是100ms,CYCLE_P是0.02s,PER_TM是1.0s。这样在OB32中定义SELECT参数为3,则每1秒钟就执行一次PID运算,并不是由CYCLE和CYCLE_P的关系来决定。
3.2.2 参数设置的经验法则
前面的描述说明了CYCLE/CYCLE_P/PER_TM之间的关系,对于具体的参数设置,可以有如下几条法则:
(1)CYCLE时间不能超过积分时间TI的10%;
(2)为了保证控制精度,脉冲周期时间PER_TM应该至少是CYCLE_P的50倍;
(3)脉冲周期时间CYCLE不能超过积分时间TI的5%
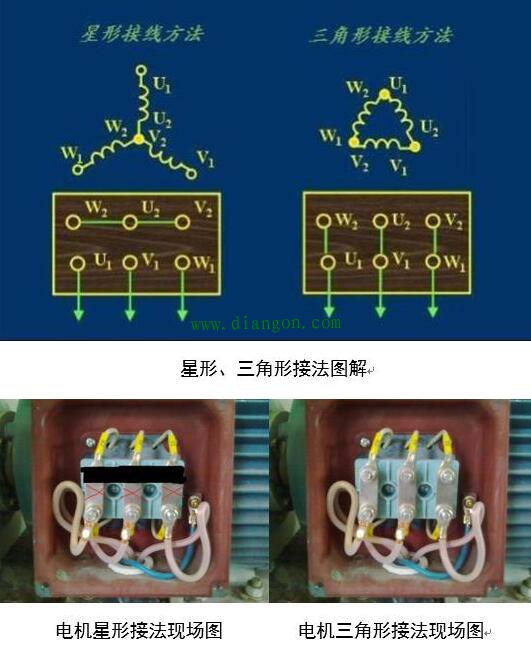
| 普通三相异步电机共有三相绕组,一般标识为“U1-U2”、“V1-V2”、“W1-W2”,异步电机有两种接线方式,一种是星形接法,一种是三角形接法,具体连接方式见下图:
电机采用三角形接法时,线圈电压为380V,运行电流为相电流的根号三倍,较大。 电机从静止起动时,星形接法的起动转矩仅是三角形接法的一半,起动电流仅仅是三角形起动的三分之一左右; 三角形接法起动时起动电流是额定电流的4-7倍,起动转矩大 |