西门子驱动6SL3120-1TE21-0AD0详细说明
MC指令称为主控指令,又名公共串联触点的连接指令,用于表示主控区的开始,该指令的操作元件为Y 、M(不包括特殊辅助继电器)。
MCR指令称为主控复位指令,又名公共串联触点的清除指令,用于表示主控区的结束,该指令的操作元件为主控指令的使用次数N(N0~N7)。 如图12-3所示。当X0接通时,执行MC到MCR的指令,当X0断开时,累积定时器、计数器、用置位/复位指令驱动的软元件保持当时的状态,非累积定时器、计数器、用OUT指令驱动的软元件变为断开状态。
在MC指令内使用MC指令称为嵌套,在有嵌套结构时,嵌套层数N的编号从N0~N7依次增大。在没有嵌套结构时,可使用N0编制程序,N0的使用次数无限。

西门子S7-1200 PLC在当前的市场中有着广泛的应用,作为常与变频器共同使用的PLC,其与西门子MM440 变频器的USS通信一直在市场上有着非常广泛的应用。本文将主要介绍如何使用USS通信协议来实现S7-1200与MM440变频器的通信。
1. USS通信介绍
1.1. USS协议特点
USS (Universal Serial Interface, 即通用串行通信接口) 是西门子专为驱动装置开发的通信协议。USS 协议的基本特点如下:
? 支持多点通信(可以应用在 RS 485 等网络上)
? 采用单主站的“主-从"访问机制
? 每个网络上多可以有 32 个节点(多 31 个从站)
? 简单可靠的报文格式,使数据传输灵活高效
? 容易实现,成本较低
USS 的工作机制是,通信总是由主站发起,USS 主站不断循环轮询各个从站,从站根据收到的指令,决定是否以及如何响应。从站永远不会主动发送数据。从站在以下条件满足时应答:
-- 接收到的主站报文没有错误,并且
-- 本从站在接收到主站报文中被寻址
上述条件不满足,或者主站发出的是广播报文,从站不会做任何响应。对于主站来说,从站必须在接收到主站报文之后的一定时间内发回响应。否则主站将视为出错。
USS 的字符传输格式符合 UART 规范,用串行异步传输方式。USS 在串行数据总线上的字符传输帧为 11 位长度,如表1所示:

表1:USS字符帧
USS 协议的报文简洁可靠,高效灵活。报文由一连串的字符组成,协议中定义了它们的特
定功能,表2所示:

表2:USS报文结构
每小格代表一个字符(字节)。其中:
STX: 起始字符,总是 02 h
LGE: 报文长度
ADR:从站地址及报文类型
BCC: BCC 校验符
净数据区由 PKW 区和 PZD 区组成,如表3所示:

表3:USS净数据区
PKW: 此区域用于读写参数值、参数定义或参数描述文本,并可修改和报告参数的改变 。其中:
PKE: 参数 ID。包括代表主站指令和从站响应的信息,以及参数号等
IND: 参数索引,主要用于与 PKE 配合定位参数
PWEm:参数值数据
PZD: 此区域用于在主站和从站之间传递控制和过程数据。控制参数按设定好的固定格式在主、从站之间对应往返。如:
PZD1:主站发给从站的控制字/从站返回主站的状态字
PZD2: 主站发给从站的给定/从站返回主站的实际反馈
根据传输的数据类型和驱动装置的不同,PKW 和 PZD 区的数据长度都不是固定的,它们可以灵活改变以适应具体的需要。在用于与控制器通信的自动控制任务时,网络上的所有节点都要按相同的设定工作,并且在整个工作过程中不能随意改变。
注意:
对于不同的驱动装置和工作模式,PKW 和 PZD 的长度可以按一定规律定义。 一旦确定就不能在运行中随意改变 ;
PKW 可以访问所有对 USS 通信开放的参数;而 PZD 仅能访问特定的控制和过程数据;
PKW 在许多驱动装置中是作为后台任务处理,PZD 的实时性要比 PKW 好。
1.2. S7-1200 USS通信简介
CM 1241 RS485 模块通过 RS485 端口与MM440进行通信。 可使用 USS 库控制MM440和读/写MM440参数。该库提供 1 个 FB 和 3 个 FC 来支持 USS 协议。 每个 CM1241 RS485 通信模块多支持 16 个MM440。连接到一个 CM 1241 RS485 的所有MM440(多 16 个)是同一 USS 网络的一部分。连接到另一 CM 1241 RS485 的所有MM440是另一 USS 网络的一部分。 因为 S7-1200多支持三个 CM 1241 RS485 设备,用户多可建立三个 USS 网络,每个网络多 16 个MM440,总共支持 48 个 USS MM440。各 USS 网络使用各自的数据块进行管理(使用三个 CM 1241 RS485 设备建立三个 USS网络需要三个数据块)。 同一USS 网络相关的所有指令必须共享该数据块。 这包括用于控制网络上所有MM440的 USS_DRV、USS_PORT、USS_RPM 和USS_WPM 指令。
2. 硬件需求及接线
2.1. 硬件需求
S7-1200 PLC目前有3种类型的CPU:
1)S7-1211C CPU。
2)S7-1212C CPU。
3)S7-1214C CPU。
这三种类型的CPU都可以使用USS通信协议通过通信模块CM1241 RS485来实现S7-1200与MM440变频器的通信。
本例中使用的PLC硬件为:
1) S7-1214C ( 6ES7 214 -1BE30 -0XB0 )
2) CM1241 RS485 ( 6ES7 241 -1Cspan0 -0XB0 )
3) CSM 1277 ( 6GK7 277 -1AA00 - 0AA0)
本例中使用的MM440变频器硬件为:
1) MM440 ( 6SE6440 - 2AB11 - 2AA1 )
2) MICROMASTER 4 ENCODER MODULE ( 6SE6400 - 0EN00 - 0AA0 )
3) SIEMENS MOTOR ( 1LA7060 - 4AB10 - Z )
4) USS 通信电缆 ( 6XV1830 - 0EH10 )
2.2. 接线
建议使用西门子的网络插头和PROFIBUS电缆。在 S7-1200 CPU 通信口上使用西门子网络插头。
PROFIBUS 电缆的红色导线B 即 RS 485 信号 +,此信号应当连接到 MM 440 通信端口的 P+;绿色导线A 即 RS 485 信号 -,此信号应当连接到 MM 440 通信端口的 N-。
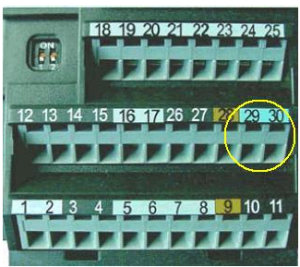

图1: MM440接线端子 表4:MM440端子定义
因为MM 440 通信口是端子连接,PROFIBUS 电缆不需要网络插头,而是剥出线头直接压在端子上。如果还要连接下一个驱动装置,则两条电缆的同色芯线可以压在同一个端子内。PROFIBUS 电缆的红色芯线应当压入端子 29;绿色芯线应当连接到端子 30,如图1、表4所示。完整接线图如图2所示。

图2:
条件跳转指令CJ用于跳过顺序程序中的某一部分,以缩短运算周期、控制程序的流程。其指令的助记符为CJ,指令代码是FNC00,操作元件为P0~P127,其程序步情况是,CJ 为3步、标号P为1步。

在图12-2中,当X0为ON时,则程序跳转到指针P8处,若X0为OFF,则按顺序执行程序,不执行跳转。当X0为ON时,Y0、M0、S0的状态不会随它们的驱动接点X1、X2、X3的状态变化而变化。定时器和计数器如果被CJ指令跳过,跳步期间它们的当前值被冻结,如果在跳步开始时定时器和计数器正在工作,在跳步期间,它们将停止计时和计数,在CJ指令的条件变为不满足时继续工作。高速计数器的处理独立于主程序,其工作不受跳步影响。如果用M8000的动合触点驱动CJ指令,则条件跳转变为无条件跳转
添加S7-1200 CPU1214C
? 添加PROFIBUS主站模块CM1243-5:1)将硬件目录中“通信模块 -> CM1243-5 -> 6GK7 243-5DX30-0XE0 "模块拖拽到CPU左侧个槽位中;2)单击CM1243-5 PROFIBUS接口图标;3)设备属性对话框下点击“PROFIBUS地址"项;4)点击“添加新子网"按钮,创建PROFIBUS_1网络;5)使用默认PROFIBUS地址2。
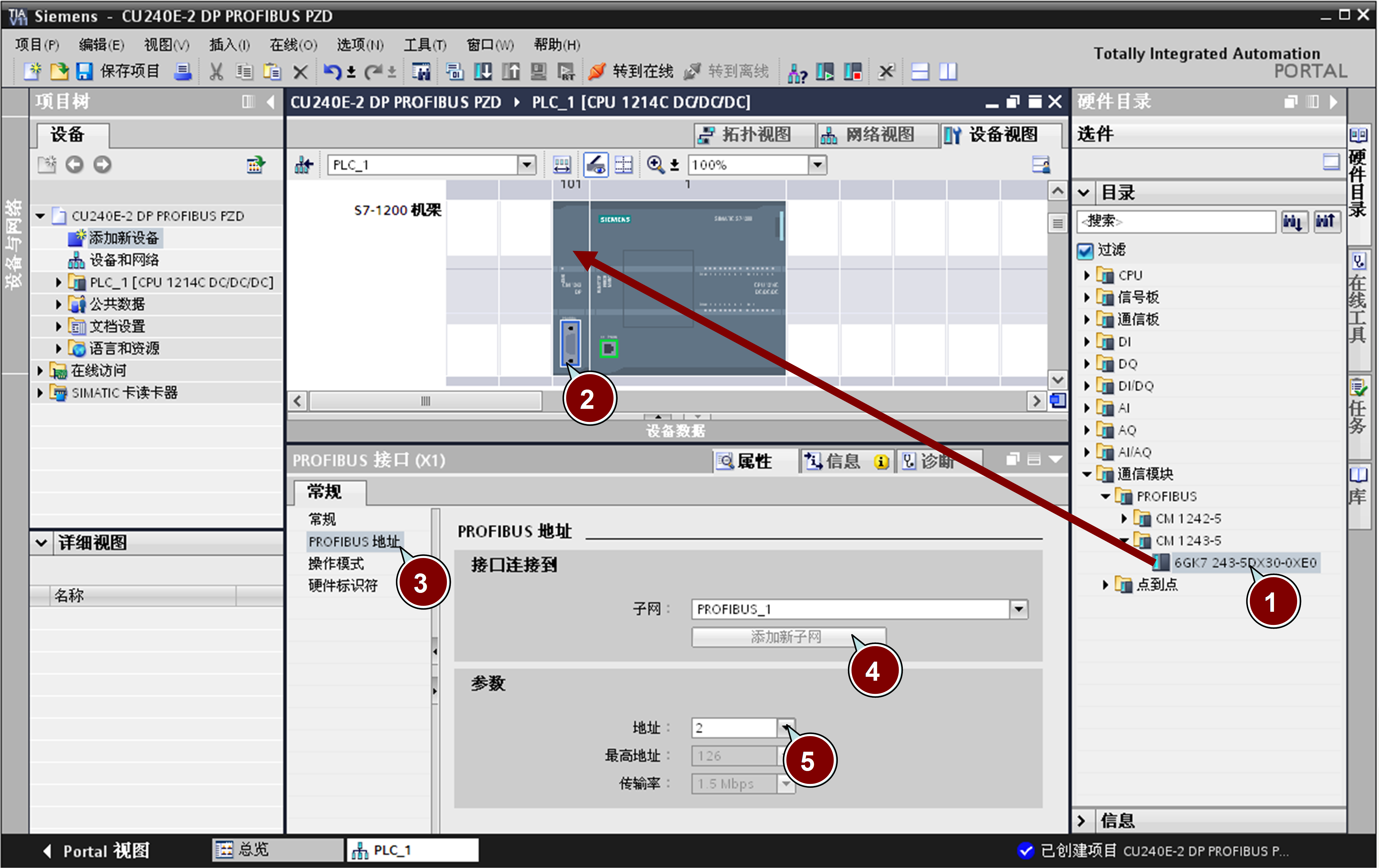
图2-4添加PROFIBUS主站模块CM1243-5
? 添加CU240E-2 DP F从站:1)点击网络视图按钮进入网络视图页面;2)将硬件目录中“其它现场设备 -> PROFIBUS DP -> 驱动器 -> Siemens AG -> SINAMICS -> SINAMICS G120 CU240x-2 DP(F)V4.4 -> 6SL3 244-0BBxx-1PA1 "模块拖拽到网络视图空白处;3)点击以插入站点蓝色“未分配"提示,选择主站“PLC_1.CM1243-5 PROFIBUS接口(X1)",完成与主站网络连接。
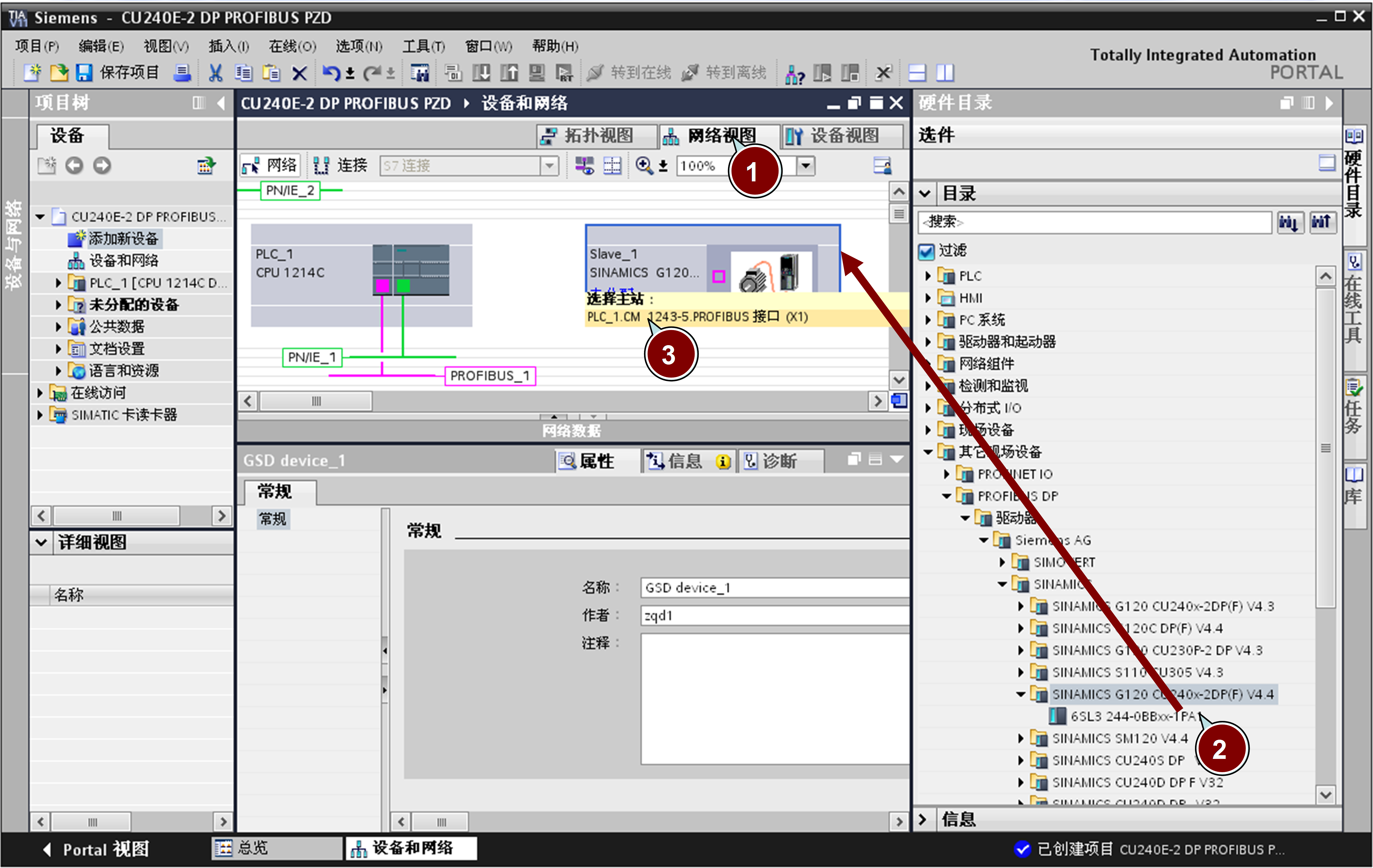
图2-5添加CU240E-2 DP F从站
? 分配CU240E-2 DP F从站地址:1)鼠标单击添加的CU240E-2 DP F从站;2)设备属性对话框下点击“PROFIBUS地址"项;3)选择“PROFIBUS_1"网络;4)设置PROFIBUS地址为10。
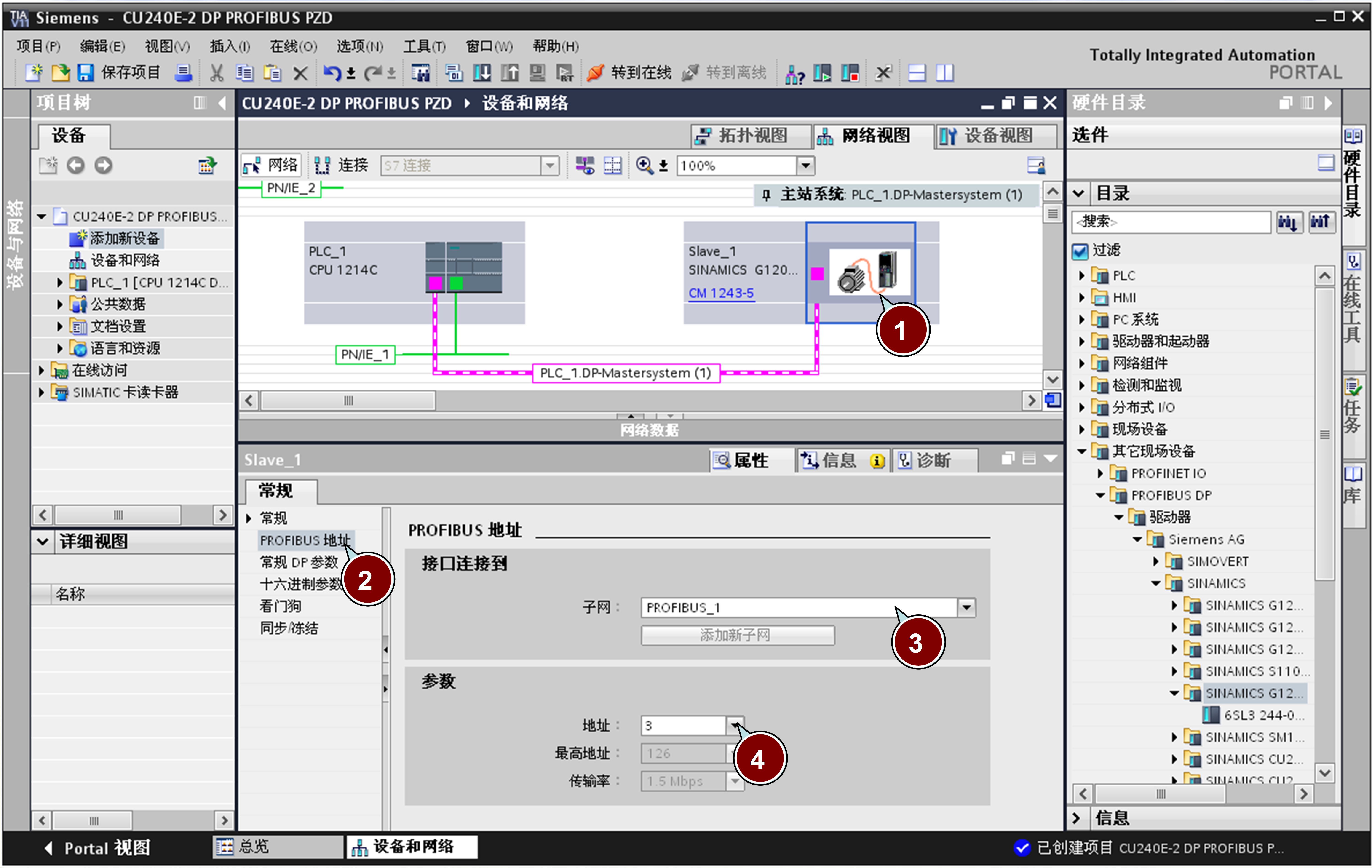
图2-6分配CU240E-2 DP F从站地址
? 组态与CU240E-2 DP F通信报文:鼠标双击添加的CU240E-2 DP F从站,打开设备视图; 1)将硬件目录中“Standard telegram1,PZD-2/2 "模块拖拽到“设备概览"视图的第1个插槽中,系统自动分配了输入输出地址,本示例中分配的输入地址IW68、IW70,输出地址QW64、QW66;2)编译项目。
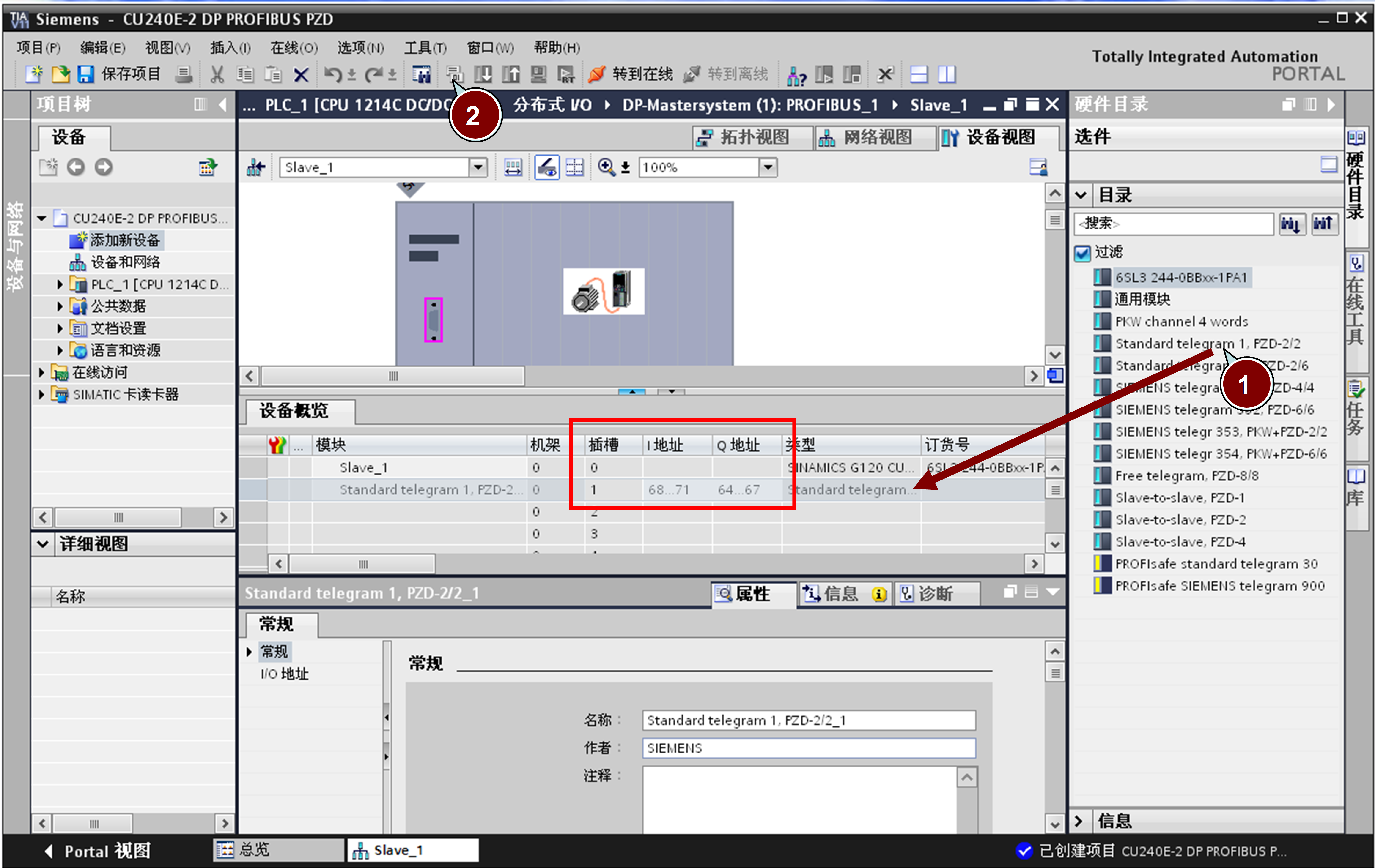
图2-7组态与CU240E-2 DP F通信报文
? 下载硬件配置:1)鼠标单击“PLC_1"选项;2)点击“下载到设备"按钮;3)选择PG/PC接口类型,PG/PC接口,子网的链接;4)点击“下载"按钮。
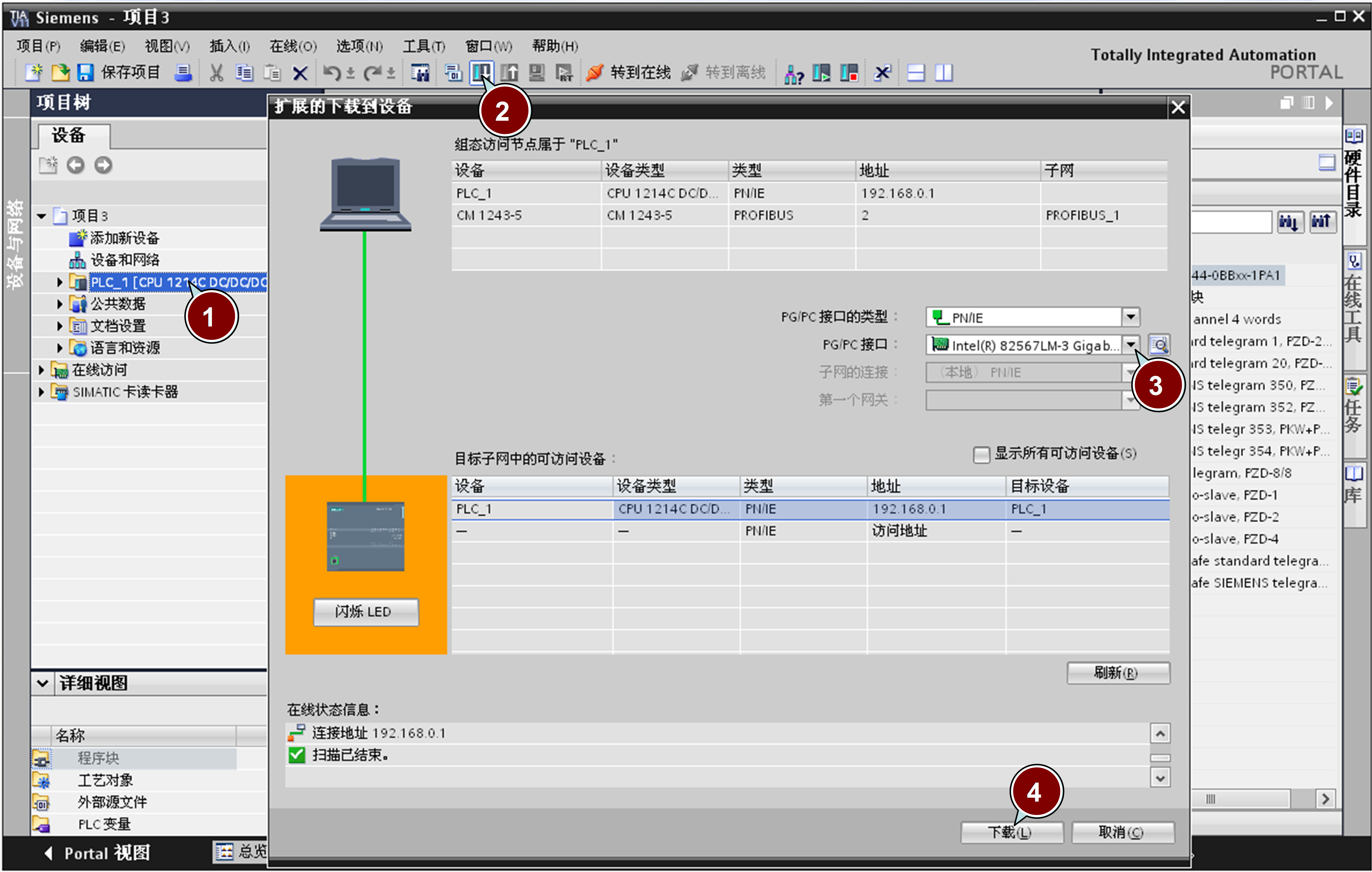
图2-8下载硬件配置
2.4 通过标准报文1控制电机起停及速度
S7-1200通过PROFIBUS PZD通信方式将控制字1(STW1)和主设定值(NSOLL_A)周期性的发送至变频器,变频器将状态字1(ZSW1)和实际转速(NIST_A_GLATT)发送到S7-1200.
控制字:常用控制字如下,有关控制字1(STW1)详细定义请参考“3 PROFIBUS报文结构及控制字和状态字"章节。
? 047E(16进制) - OFF1停车
? 047F(16进制) - 正转启动
? 0C7F(16进制) - 反转启动
? 04FE(16进制) - 故障复位
主设定值:速度设定值要经过标准化,变频器接收十进制有符号整数16384(4000H十六进制)对应于的速度,接收的速度为32767(200%)。参数P2000中设置对应的参考转速。
反馈状态字详细定义请参考“3 PROFIBUS报文结构及控制字和状态字"章节。
反馈实际转速同样需要经过标准化,方法同主设定值。
示例:通过TIA PORTAL软件“监控表"模拟控制变频器起停、调速和监控变频器运行状态。
表2-2 PLC I/O地址与变频器过程值
启动变频器
启动变频器需将控制字1(STW1)16#047E写入QW64使变频器运行准备就绪,将16#047F写入QW64启动变频器。
停止变频器
将16#047E写入QW64停止变频器;
调整电机转速
将主设定值(NSOLL_A)十进制16384写入QW66,设定电机转速为1500rpm。
读取IW68和IW70分别可以监视变频器状态和电机实际转速。

图2-8监控表