永州西门子专业授权代理商
梯形图的结构分析
采用一般编程方法还是采用顺序功能图编程方法;采用顺序功能图的单序列结构还是选择序列结构、并行序列结构,使用启/保/停电路、步进顺控指令进行编程还是用置位/复位指令进行编程。这部分内容见第四章和第五章。
梯形图的分解由操作主令电路(如按钮)开始,查线追踪到主电路控制电器(如接触器)动作,中间要经过许多编程元件及电路,查找起来比较困难。
无论多么复杂的梯形图,都是由一些基本单元构成的。按主电路的构成情况,利用逆读溯源法,把梯形图和指令语句表分解成与主电路的用电器(如电动机)相对应的几个基本单元,一个环节、一个环节地分析,后再利用顺读跟踪法把各环节串起来。
(1) 按钮、行程开关、转换开关的配置情况及作用
在PLC的I/O接线图中有许多行程开关和转换开关,以及压力继电器、温度继电器等,这些电器元件没有吸引线圈,它们的触点的动作是依靠外力或其他因素实现的,必须先把引起这些触点动作的外力或因素找到。其中行程开关由机械联动机构来触压或松开,而转换开关一般由手工操作,从而使这些行程开关、转换开关的触点在设备运行过程中便处于不同的工作状态,即触点的闭合、断开情况不同,以满足不同的控制要求,这是看图过程中的一个关键。
这些行程开关、转换开关的触点的不同工作状态单凭看电路图难以搞清楚,必须结合设备说明书、电器元件明细表,明确该行程开关、转换开关的用途,操纵行程开关的机械联动机构,触点在不同的闭合或断开状态下电路的工作状态等。
(2) 采用逆读溯源法将多负载(如多电动机电路)分解为单负载(如单电动机)电路
根据主电路中控制负载的控制电器的主触点文字符号,在PLC的I/O接线图中找出控制该负载的接触器线圈的输出继电器,再在梯形图和指令语句表中找出控制该输出继电器的线圈及其相关电路,这就是控制该负载的局部电路。
在梯形图和指令语句表中,很容易找到该输出继电器的线圈电路及其得电、失电条件,但引起该线圈的得电、失电及其相关电路就不容易找到,可采用逆读溯源法去寻找:
1) 在输出继电器线圈电路中串、并联的其他编程元件触点的闭合、断开就是该输出继电器得电、失电的条件。
2) 由这些触点再找出它们的线圈电路及其相关电路,在这些线圈电路中还会有其他接触器、继电器的触点……
3) 如此找下去,直到找到输入继电器(主令电器)为止。
当某编程元件得电吸合或失电释放后,应该把该编程元件的所有触点所带动的前、后级编程元件的作用状态全部找出,不得遗漏
PID_Compact 会生成可设定的输出值来对错误做出响应:
● 零(未激活)
PID_Compact 针对所有错误都输出 0.0 作为输出值,切换到“未激活"模式。只能
通过 Reset 的下降沿或 ModeActivate 的上升沿重新激活控制器。
● 错误未决时的当前值
如果在 自动模式下发生以下错误,则只要这些错误不再处于未决状态,PID_Compact
便会返回自动模式。
如果发生一个或多个下列错误,则 PID_Compact 停留在
自动模式下:
– 0001h:参数“Input"超出了过程值限值的范围。
– 0800h:采样时间错误
– 40000h:Disturbance 参数的值无效。
如果在 自动模式下发生一个或多个下列错误,PID_Compact 将切换到“带错误监视的替
代输出值"模式并输出*后一个有效输出值:
– 0002h:Input_PER 参数的值无效。
– 0200h:Input 参数的值无效。
– 0400h:输出值计算失败。
– 1000h:Setpoint 参数的值无效。
如果在 手动模式下发生错误,PID_Compact 将继续使用手动值作为输出值。如果手动
值无效,则使用替代输出值。如果手动值无效和替代输出值都无效,则使用输出值下
限。
如果在 预调节或**调节期间出现下列错误,PID_Compact 将保持激活模式。
– 0020h:**调节期间不允许预调节。
出现其它错误时,PID_Compact 将取消调节并切换到调节开始时的模式。
只要错误不再处于未决状态,PID_Compact 就会返回自动模式
ROI 位置:阅读器处于“编辑"状态时,“跟随步骤 x"(Follow step x) 不会运行
阅读器处于“编辑"状态时,“跟随步骤 x"(Follow step x)
功能不会运行。在此模式下,ROI 位置保持固定。
ROI 位置:“跟随步骤 x"(Follow step x) 功能仅用于参考的结果位置
用作 ROI 位置参考的步骤必须生成结果位置,以确保功能正常运行。
如果参考步骤处理多个代码或多个对象实例,则不会生成结果位置。这种情况下,
差的实例或代码会用作参考位置。此时无法确保功能正常运行
PLC概念
1、PLC的基本概念
可编程控制器(Programmable Controller)是计算机家族中的一员,是为工业控制应用而设计制造的。早期的可编程控制器称作可编程逻辑控制器(Programmable Logic Controller),简称PLC,它主要用来代替继电器实现逻辑控制。随着技术的发展,这种装置的功能已经大大超过了逻辑控制的范围,今天这种装置称作可编程控制器,简称PC。为了避免与个人计算机(Personal Computer)的简称混淆,将可编程控制器简称PLC
2、PLC的基本结构
PLC实质是一种于工业控制的计算机,其硬件结构基本上与微型计算机相同,如图所示:
a. 中央处理单元(CPU)
中央处理单元(CPU)是PLC的控制中枢。它按照PLC系统程序赋予的功能接收并存储从编程器键入的用户程序和数据;检查电源、存储器、I/O以及警戒定时器的状态,并能诊断用户程序中的语法错误。当PLC投入运行时,它以扫描的方式接收现场各输入装置的状态和数据,并分别存入I/O映象区,从用户程序存储器中逐条读取用户程序,经过命令解释后按指令的规定执行逻辑或算数运算的结果送入I/O映象区或数据寄存器内。等所有的用户程序执行完毕之后,后将I/O映象区的各输出状态或输出寄存器内的数据传送到相应的输出装置,如此循环运行,直到停止运行。
为了提高PLC的可*性,近年来对大型PLC还采用双CPU构成冗余系统,或采用三CPU的表决式系统。这样,某个CPU出现故障,整个系统仍能正常运行。
b、存储器
存放系统软件的存储器称为系统程序存储器。
存放应用软件的存储器称为用户程序存储器。
C、电源
PLC的电源在整个系统中起着十分重要得作用。如果没有一个良好的、可*得电源系统是无法正常工作的,PLC的制造商对电源的设计和制造也十分重视。一般交流电压波动在+10%(+15%)范围内,可以不采取其它措施而将PLC直接连接到交流电网上去。
3、PLC的工作原理
一. 扫描技术
当PLC投入运行后,其工作过程一般分为三个阶段,即输入采样、用户程序执行和输出刷新三个阶段。完成上述三个阶段称作一个扫描周期。在整个运行期间,PLC的CPU以一定的扫描速度重复执行上述三个阶段。
(一) 输入采样阶段
在输入采样阶段,PLC以扫描方式依次地读入所有输入状态和数据,并将它们存入I/O映象区中的相应得单元内。输入采样结束后,转入用户程序执行和输出刷新阶段。在这两个阶段中,输入状态和数据发生变化,I/O映象区中的相应单元的状态和数据也不会改变。如果输入是脉冲信号,则该脉冲信号的宽度必须大于一个扫描周期,才能保证在任何情况下,该输入均能被读入。
(二) 用户程序执行阶段
在用户程序执行阶段,PLC总是按由上而下的顺序依次地扫描用户程序(梯形图)。在扫描每一条梯形图时,又总是先扫描梯形图左边的由各触点构成的控制线路,并按先左后右、先上后下的顺序对由触点构成的控制线路进行逻辑运算,根据逻辑运算的结果,刷新该逻辑线圈在系统RAM存储区中对应位的状态;或者刷新该输出线圈在I/O映象区中对应位的状态;或者确定是否要执行该梯形图所规定的特殊功能指令。
即,在用户程序执行过程中,只有输入点在I/O映象区内的状态和数据不会发生变化,而其他输出点和软设备在I/O映象区或系统RAM存储区内的状态和数据都有可能发生变化,排在上面的梯形图,其程序执行结果会对排在下面的凡是用到这些线圈或数据的梯形图起作用;排在下面的梯形图,其被刷新的逻辑线圈的状态或数据只能到下一个扫描周期才能对排在其上面的程序起作用。
(三) 输出刷新阶段
当扫描用户程序结束后,PLC就进入输出刷新阶段。在此期间,CPU按照I/O映象区内对应的状态和数据刷新所有的输出锁存电路,再经输出电路驱动相应的外设。这时,才是PLC的真正输出。
比较下二个程序的异同:
程序1:
程序2:
这两段程序执行的结果*一样,但在PLC中执行的过程却不一样。
※ 程序1只用一次扫描周期,就可完成对%M4的刷新;
※ 程序2要用四次扫描周期,才能完成对%M4的刷新。
这两个例子说明:同样的若干条梯形图,其排列次序不同,执行的结果也不同。也可以看到:采用扫描用户程序的运行结果与继电器控制装置的硬逻辑并行运行的结果有所区别。当然,如果扫描周期所占用的时间对整个运行来说可以忽略,那么二者之间就没有什么区别了。
一般来说,PLC的扫描周期包括自诊断、通讯等,如下图所示,即一个扫描周期等于自诊断、通讯、输入采样、用户程序执行、输出刷新等所有时间的总和
PLC控制系统梯形图的特点
(1) PLC控制系统的输入信号和输出负载
继电器电路图中的交流接触器和电磁阀等执行机构用PLC的输出继电器来控制,它们的线圈接在PLC的输出端。按钮、控制开关、限位开关、接近开关等用来给PLC提供控制命令和反馈信号,它们的触点接在PLC的输入端。
(2) 继电器电路图中的中间继电器和时间继电器的处理
继电器电路图中的中间继电器和时间继电器的功能用PLC内部的辅助继电器和定时器来完成,它们与PLC的输入继电器和输出继电器无关。
(3) 设置中间单元
在梯形图中,若多个线圈都受某一触点串/并联电路的控制,为了简化电路,在梯形图中可设置用该电路控制的辅助继电器,辅助继电器类似于继电器电路中的中间继电器。
(4) 时间继电器瞬动触点的处理
时间继电器除了延时动作的触点外,还有在线圈得电或失电时立即动作的瞬动触点。对于有瞬动触点的时间继电器,可以在梯形图中对应的定时器的线圈两端并联辅助继电器,后者的触点相当于时间继电器的瞬动触点。
(5) 外部联锁电路的设立
为了防止控制正/反转的两个接触器动作,造成三相电源短路,除了在梯形图中设置与它们对应的输出继电器的线圈串联的动断触点组成的软互锁电路外,还应在PLC外部设置硬互锁电路
S7-1200 可编程逻辑控制器 (PLC, Programmable Logic Controller) 提供了控制各种设备以满足您自动化需要的灵活性和强大功能。 S7-1200 设计紧凑、组态灵活且具有功能强大的指令集,这些特点的组合使它成为控制各种应用的解决方案。
CPU 将微处理器、集成电源、输入电路和输出电路组合到一个设计紧凑的外壳中以形成功能强大的 PLC。 在您下载用户程序后,CPU 将包含监控应用中的设备所需的逻辑。CPU 根据用户程序逻辑监视输入并更改输出,用户程序可以包含布尔逻辑、计数、定时、复杂数学运算以及与其它智能设备的通信。有多种安全功能可用于保护对 CPU 和控制程序的访问:
● 每个 CPU 都提供密码保护功能,用户通过它可以组态对 CPU 功能的访问。
● 可以使用“专有技术保护"隐藏特定块中的代码。
CPU 提供一个 PROFINET 端口用于通过 PROFINET 网络通信。 还可使用通信模块通过RS485 或 RS232 网络通信
发展到现在,DCS和PLC之间没有一个严格的界线,在大多数人看来,大的系统就是DCS,小的系统就叫PLC。当然,这么说也不是不可以,还不对。现在我们来重新建立这个观念。
DCS和PLC之间有什么不同?
一、从发展的方面来说
1、DCS从传统的仪表盘监控系统发展而来。DCS从先天性来说较为侧重仪表的控制。
2、PLC从传统的继电器回路发展而来,初的PLC甚至没有模拟量的处理能力,PLC从开始就强调的是逻辑运算能力。
二、从SITOP电源的应用角度来说
1、DCS系统,不管是广泛使用的西门子PCS7系统,还是和利时、浙大中控或者上海新华等,都会配有的电源柜,电源柜里面放置母排,从母排上各个端子上引出220V的交流电给每个机柜、操作台,在机柜里面若干套24VDC直流开关电源,给卡件,安全栅,继电器等进行供电。每组电源都是冗余配置,确保供电的稳定和可靠性。

2、PLC系统,对于SITOP电源来说可以分为以下几类;
1)西门子PLC:西门子PLC模块控制器CPU1217C
系统电源(CPU供电)
如果在SCALANCE X-300中没有C-PLUG,则C-PLUG的状态显示"NOT PRESENT"。
1. 串行通讯模块基本信息介绍
CP340/CP341/CP440/CP441-1/CP441-2模块是西门子S7-300/400系列PLC中的串行通讯模块,这些模块具有1个或2个(CP441-2)串行通讯接口(RS232C、20mA-TTY或RS485/422)。您可以使用这些通讯模块实现S7-300/400系统与其他串行通讯设备的数据交换,例如打印机、扫描仪、智能仪表、第三方MODBUS主从站、Data Highway、变频器,USS站等。
1.1 产品订货信息
下表给出了常用串行通讯模块以及相关产品的订货信息:
产品名称订货号备注通信模块S7-200 CPU参考S7-200样本或手册S7-200CM 1241-RS2326ES7 241-1AH30-0XB0 S7-1200CM 1241-RS4856ES7 241-1CH30-0XB0CPU313C-2PtP6ES7 313-6BF03-0AB0S7-300 CPUCPU314C-2PtP6ES7 314-6BG03-0AB0CP340-RS232C6ES7 340-1AH02-0AE0S7-300 CPCP340-20mA-TTY6ES7 340-1BH02-0AE0CP340-RS422/4856ES7 340-1CH02-0AE0CP341-RS232C6ES7 341-1AH02-0AE0CP341-20mA-TTY6ES7 341-1BH02-0AE0CP341-RS422/4856ES7 341-1CH02-0AE0CP4406ES7 440-1CS00-0YE0S7-400CP441-16ES7 441-1AA04-0AE0CP441-26ES7 441-2AA04-0AE0CP441-2 RS232C接口子模块6ES7 963-1AA00-0AA0CP441-2 20mA TTY接口子模块6ES7 963-2AA00-0AA0CP441-2 RS422/485接口子模块6ES7 963-3AA00-0AA0ET200S ISI 3964/ASCII6ES7 138-4DF01-0AB0ET200SET200S ISI MODBUS/USS6ES7 138-4DF11-0AB0连接电缆
RS232C 接口 5m6ES7 902-1AB00-0AA09针D型孔接头RS232C 接口 10m6ES7 902-1AC00-0AA0RS232C 接口 15m6ES7 902-1AD00-0AA020mA-TTY 接口 5m6ES7 902-2AB00-0AA09针D型针接头20mA-TTY 接口 10m6ES7 902-2AC00-0AA020mA-TTY 接口 50m6ES7 902-2AG00-0AA0RS422/485 接口 5m6ES7 902-3AB00-0AA015针D型针接头RS422/485 接口 10m6ES7 902-3AC00-0AA0RS422/485 接口 50m6ES7 902-3AG00-0AA0加载驱动协议
MODBUS 主站硬件狗Dongle6ES7 870-1AA01-0YA0包括软件、手册光盘MODBUS 主站硬件狗Dongle6ES7 870-1AA01-0YA1不包括软件、手册光盘MODBUS 从站硬件狗Dongle6ES7 870-1AB01-0YA0包括软件、手册光盘MODBUS 从站硬件狗Dongle6ES7 870-1AB01-0YA1不包括软件、手册光盘
表1 串口通讯模块以及相关产品的订货信息
说明:1、当您要实现MODBUS或Data Highway通讯时,需要在CP341/CP441-2模块上插入相应协议的硬件狗,这里我们所提到的硬件狗、Dongle、协议驱动或Loadable driver指的是同一个东西,如下图:
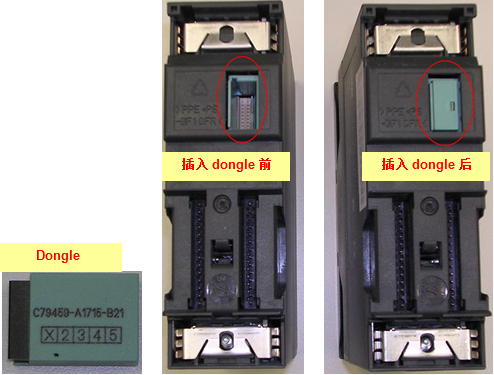
图1
2、MODBUS 是单主站结构的串行通信协议,系统中只能够有一个MODBUS主站,并且只能够实现主站和从站的数据交换,从站之间不能进行数据交换。
3、一般来讲,RS232C接口的通讯大距离为15m,20mA-TTY接口的通讯大距离为100m(主动模式)/ 1000m(被动模式),RS422/485接口的通讯大距离位1200m。
4、Serial CPs模块可以与多台串行通讯设备进行通讯,如连接多个变频器、多个智能仪表等,如果您采用ASCII 通讯方式,需要人为地定义数据帧格式,可以在发送的数据包中包括站号、数据区、读写指令等信息,供Serial CPs 模块所连接的从站设备鉴别数据包是发给哪个站的,以及该数据包是对那个数据区进行的读或写。
5、串行通讯模板只有RS232C、20mA-TTY或RS485/422 三种电气接口类型,如果您想实现串口的光纤通讯,只能在电子市场上购买第三方制造的电气与光缆的转换设备,西门子不提供该类设备。
紧凑型 CPU 1217C 带有:
集成的 24 V 编码器/负载电流源:
用于直接连接传感器和编码器。带有 400 mA 输出电流,它也可用作负载电源。
14 点集成数字量输入,其中:
10 点集成 24 V 直流数字量输入(漏电流/源电流(IEC 1 型漏电流))。
4 点集成数字量 1.5 VDC 差分输入。
10 点集成数字量输出,其中:
10 点集成数字量 24 VDC 输出。
4 点集成数字量 1.5 VDC 差分输出。
2 点集成模拟量输入 0 ~10 V。
2 点集成模拟量输出 0 ~20 mA。
4 点脉冲输出 (PTO),频率高 1 MHz。
脉冲宽度调制输出 (PWM),频率高 100 kHz。
2 个集成以太网接口(TCP/IP native、ISO-on-TCP)。
6 个快速计数器 (大 1 MHz),带有可参数化的使能和复位输入,可以用作带有 2 点单独输入的加减计数器,或用于连接增量型编码器。
通过附加通信接口扩展,例如,RS485、RS232 或 PROFIBUS。
通过信号板使用模拟或数字信号直接在 CPU 上扩展(保持 CPU 安装尺寸)
通过信号模块使用各种模拟量和数字量输入和输出信号扩展。
可选存储器扩展(SIMATIC 存储卡)。
按照 PLCopen 对简单运动进行的运动控制。
PID 控制器,具有自动调谐功能。
集成实时时钟。
口令保护。
中断输入:
对过程信号的上升沿或下降沿作出*速响应
时间中断。
中断输入。
库功能。
在线/离线诊断。
所有模块上均为可拆卸的端子。
仿真器(可选):
用于仿真集成输入和测试用户程序。
丰富的指令集:
运算种类众多,便于编程:
基本操作,如二进制逻辑运算、结果赋值、存储、计数、产生时间、装载、传输、比较、移位、循环移位、产生补码、调用子程序(带局部变量)
集成通信命令(例如,USS 协议、Modbus RTU、S7 通信“T-Send/T-Receive"(T 发送/T 接收)或自由端口模式 (Freeport))
使用简便的功能,如脉冲宽度调制、脉冲序列功能、运算功能、浮点运算功能、PID 闭环控制、跳转功能、环路功能和代码转换
数学函数,例如 SIN、COS、TAN、LN、EXP
计数:
用户友好的计数功能配以集成的计数器和高速计数器指令给用户开辟了新的应用领域。
中断处理:
边沿触发中断(由过程信号的上升沿或下降沿触发)允许对过程中断作出极快的响应。
时间触发中断。
当达到设定值或计数器方向改变时,可触发计数器中断。
通信中断使得能迅速方便地与周围的设备如打印机或条码阅读器交换信息。
口令保护
测试和诊断功能:
易于使用的功能支持测试和诊断,例如,在线/离线诊断。
在测试和诊断过程中“强制"输入和输出:
可不在循环周期内独立设置输入和输出,例如可以检测用户程序。
按照 PLCopen 对简单运动进行的运动控制