汕尾西门子专业授权代理商
主站和每个从站都有一个发送和一个接收数据块 (Send_DB 和 Receive_DB)。通过 TCON 块,主站将一个 TCP/IP 连接请求 发送到**个从站。要确认连接已建立,通信对端也要执行 TCON 块。当存在同步作业时,主站读取系统时间,并通过 TSEND 通信块将此时间和用户数据发送到从站。对于 TRCV 接收块,该块在 Receive_DB 数据块中接收数据 。从站使用从主站中接收到的日时钟数据来同步它自己的系统时间。从站 1 通过 TSEND 块 将它的用户数据发送到主站。在主站一侧,使用 TRCV 块将从站 1 的用户数据存储到接收数据块中的*位置。随后,主站使用 TDISCON 块断开到从站 1 的连接 。对后续从站重复执行此过程。在主站与**后一个从站交换数据完成之后,主站重新与从站 1 进行数据交换。一旦在从站侧建立一个连接,该连接将一直保持。仅须在初始化时调用 TCON。
为了便于启动,我们为用户提供了带有测试代码和测试参数的软件实例,以供下载,这些软件实例帮助用户理解组态实例的一些起始步骤,及对组态实例的测试。这样用户便可以快速测试组态实例中描述的产品的硬件和软件接口。
西门子S7-1200 紧凑型PLC在当前的市场中有着广泛的应用,作为经常与SENTRON PAC3200系列仪表共同使用的PLC,其Modbus通信协议的使用一直在市场上有着非常广泛的应用。本文将主要介绍如何使用Modbus 通信协议来实现S7-1200与SENTRON PAC3200仪表的通信。

编码器的厂家生产的系列都很全,一般都是的,如电梯型编码器、机床编码器、伺服电机型编码器等,并且编码器都是智能型的,有各种并行接口可以与其它设备通讯。编码器是把角位移或直线位移转换成电信号的一种装置。前者成为码盘,后者称码尺.按照读出方式编码器可以分为接触式和非接触式两种.接触式采用电刷输出,一电刷接触导电区或绝缘区来表示代码的状态是“1"还是“0";非接触式的接受敏感元件是光敏元件或磁敏元件,采用光敏元件时以透光区和不透光区来表示代码的状态是“1"还是“0"。按照工作原理编码器可分为增量式和式两类。
增量式编码器是将位移转换成周期性的电信号,再把这个电信号转变成计数脉冲,用脉冲的个数表示位移的大小。式编码器的每一个位置对应一个确定的数字码,它的示值只与测量的起始和终止位置有关,而与测量的中间过程无关。旋转增量式编码器以转动时输出脉冲,通过计数设备来知道其位置,当编码器不动或停电时,依靠计数设备的内部记忆来记住位置。这样,当停电后,编码器不能有任何的移动,当来电工作时,编码器输出脉冲过程中,也不能有干扰而丢失脉冲,不然,计数设备记忆的零点就会偏移,这种偏移的量是无从知道的,只有错误的生产结果出现后才能知道。解决的方法是增加参考点,编码器每经过参考点,将参考位置修正进计数设备的记忆位置。在参考点以前,是不能保证位置的准确的。为此,在工控中就有每次操作先找参考点,开机找零等方法。这样的编码器是由码盘的机械位置决定的,它不受停电、干扰的影响。
编码器由机械位置决定的每个位置的性,它无需记忆,无需找参考点,不用一直计数,什么时候需要知道位置,什么时候就去读取它的位置。这样,编码器的抗干扰特性、数据的可靠性大大提高了。
由于编码器在定位方面明显地优于增量式编码器,已经越来越多地应用于工控定位中。型编码器因其高精度,输出位数较多,如仍用并行输出,其每一位输出信号必须确保连接很好,对于较复杂工况还要隔离,连接电缆芯数多,由此带来诸多不便和降低可靠性,编码器在多位数输出型,一般均选用串行输出或总线型输出,德国生产的型编码器串行输出常用的是SSI(同步串行输出)。
多圈式编码器。
编码器生产厂家运用钟表齿轮机械的原理,当中心码盘旋转时,通过齿轮传动另一组码盘(或多组齿轮,多组码盘),在单圈编码的基础上再增加圈数的编码,以扩大编码器的测量范围,这样的编码器就称为多圈式编码器,它同样是由机械位置确定编码,每个位置编码不重复,而无需记忆。多圈编码器另一个优点是由于测量范围大,实际使用往往富裕较多,这样在安装时不必要费劲找零点,将某一中间位置作为起始点就可以了,而大大简化了安装调试难度。多圈式编码器在长度定位方面的优势明显,已经越来越多地应用于工控定位中

设备组态
1. 软件:西门子博途v14 SP1
2. 硬件组态:两台S7-1200系列PLC
(型号:1214C DC/DC/DC,订货号:6ES7 214-1AG-40-0XB0),打开主站PLC_1组态,启用时钟存储器字节,双击主站PLC_1以太网口,新建网络PNIE_1,设定IP地址为192.168.0.1,打开从站PLC_2组态,启用时钟存储器字节双击从站PLC_2以太网口,选择PLC_1已建立的PNIE_1网络,设定IP地址为192.168.0.2,网络视图显示两台PLC已连接。网络组态完毕,下面开始写程序。
3. 程序编写
(1). 主站发送,从站读取数据
打开主站程序块中Main(OB1)主程序块,选择“通讯"指令中的“开放式用户通信"子选项,调用“TSEND_C"(通过以太网发送数据)指令:自动生成背景DB块,点击确定,组态主站发送程序块。点击程序块上的“开始组态"按钮,组态连接参数,选择通讯伙伴为从站PLC_2,连接类型为TCP,连接ID主站从站均为1.,主站从站分别新建“连接数据"主站选中“主动建立连接",其他设置默认。打开从站MAIN(OB1)程序块,选择“通讯"指令中的“开放式用户通信"子选项,调用“TRCV_C"(通过以太网读取数据)指令。

零磁通电流互感器的误差包括容性误差、磁性误差以及检测调整电子电路的灵敏度误差三部分。所谓容性误差,是指各侧线圈本身和线圈之间的容性泄露电流所造成的测量误差。对工频信号来说,当N2电流互感器由于一、二次绕组匝数均很小,容性误差可以不计。检测绕组匝数相对较多,但其电位差动态逼近零,其容性误差仍可忽略。
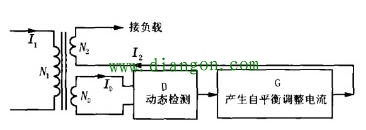
经过电流传感器高速动态调整后,I0——0,铁芯逼近零磁通,磁性误差很小。但事实上,完全的零磁通状态是达不到的,铁芯中必须有一点微弱的磁通才能使G输出I2,这就使磁性误差仍然存在。从电流互感器磁势平衡方程可见,磁性误差主要由两部分组成:一是由I0带来的参与磁势引起的误差,另一部分是由检测绕组ID带来的附加磁势引起的误差,即:
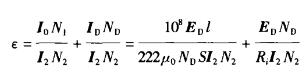
其中:ED为ND的感应电势,l为磁路长度,S为铁芯截面积,u0为铁芯初始磁导率,Ri为检测单元输入阻抗。降低磁性误差一是应当选择u0值较高的铁芯和合适的检测绕组匝数,本传感器选择了u0为6*10^4的超微晶铁芯,ND为100~500匝;二是要有较大的检测单元输入阻抗,ED和I2可通过有源动态平衡网络控制在所需范围内。还可以使用高导电、高导磁材料做屏蔽以消除电磁场的干扰,亦可用超微晶合金作此屏蔽材料。
图所示零磁通电流传感器的原始框图。其中,ND为检测绕组,D为动态检测单元,C为产生二次电流的有源网络。本回路的磁势平衡方程为:
|