临夏西门子专业授权代理商
按调节理论分类
1.开环伺服系统
开环伺服系统即无位置反馈的系统,其驱动元件主要是功率或液压脉冲马达。这两种驱动元件的工作原理的实质是数字脉冲到角度位移的变换,它不用位置检测元件实现定位,而是靠驱动装置本身,转过的角度正比与指令脉冲的个数;运动速度由进给脉冲的频率决定。

开环伺服系统的结构简单,易于控制,但精度差,低速不平稳,告诉扭矩小。一般用于轻载负载变化不大或经济型上。
2.闭环伺服系统
闭环伺服系统是误差控制随动随动系统。数控机床进给系统的误差,是cnc输出的位置指令和机床工作台(或刀架)实际位置的差值。闭环系统运动执行元件不能反映运动的位置,需要有位置检测装置。该装置测出实际位移量或者实际所处的位置,并将测量值反馈给cnc装置,与指令进行比较,求得误差,依次构成闭环位置控制。

由于闭环伺服系统是反馈控制,反馈测量装置精度很高,系统传动链的误差,环内各元件的误差以及运动中造成的误差都可以得到补偿,从而大大提高了跟随精度和定位精度。
3.半闭环系统
位置检测元件不直接安装在进给坐标的*终运动部件上,而是中间经过机械传动部件的位置转换,称为间接测量。亦即坐标运动的传动链有一部分在位置闭环以外,在环外的传动误差没有得到系统的补偿,这种伺服系统的精度低于闭环系统。

半闭环和闭环系统的控制结构是一致的,不同点只是闭环系统环内包括较多的机械传动部件,传动误差均可被补偿。理论上精度可以达到很高。但由于受机械变形、温度变化、振动以及其它因素的影响,系统稳定性难以调整。机床运行一段时间后,由于机械传动部件的磨损、变形以及其它因素的改变,容易使系统稳定性改变,精度发生变化。目前使用半闭环系统较多。只在具备传动部件紧密度高、性能稳定、使用过程温差变化不大的高精度数控机床上使用全闭环伺服系统。
按使用直流和交流伺服电机分按使用驱动元件分类
1.电液伺服系统
电液伺服系统的执行元件是液压元件,其前一级为元件。驱动元件为液压机和液压缸,常用的有电液脉冲马达和电液伺服马达。数控机床发展的初期,多数采用电液伺服系统。电液伺服系统具有在低速下可以得到很高的输出力矩,以及刚性好、时间常数小、反映快和速度平稳等优点。液压系统需要油箱、油管等供油系统,体积大。还有噪声、漏油等问题,故从20世纪70年代起逐步被电气伺服系统代替。只是具有特殊要求时才采用电液伺服系统。
2.电气伺服系统
电气伺服系统全部采用器件和电机部件,操作维护方便,可靠性高。电气伺服系统中的驱动元件主要有步进电机和交流伺服电机。它们没有液压系统中的噪声、污染和维修费用高等问题,但反应速度和低速力矩不如液压系统高,现在电机的驱动线路、电机本身的结构都得到很大的改善,性能大大提高,已经在更大的范围取代液压伺服系统。
1.直流伺服系统
直流伺服系统常用的伺服电机有小惯量直流伺服电机和永磁直流伺服电机(也称为大惯量宽调速直流伺服电机)。小惯量伺服电机*大限度地减少了电枢的转动惯量,能获得**的快速性。小惯量伺服电机一般都设计成有高的额定转速和低的惯量,应用时,要经过中间机械传动(如齿轮副)才能与丝杠相连接。
2.交流伺服系统
交流伺服系统使用交流异步伺服电机和永磁同步伺服电机。由于直流伺服电机存在着固有的圈点,使其应用环境受到限制。交流伺服电机没有这些缺点,且转子惯量较直流电机小,使得动态响应好。在同体积条件下,交流电机的输出功率可比直流电机提高10%~70%。还有交流电机的容量可以比直流电机造的大,达到更高的转速和电压。
按进给驱动和主轴驱动分类
1.进给伺服系统
进给伺服系统是指一般概念的伺服系统,它包括速度控制环和位置控制环。进给伺服系统完成各坐标轴的进给运动,具有定位和轮廓跟踪功能。

2.主轴伺服系统
严格来说,一般的主轴控制只是一个速度控制系统。主要实现主轴的旋转运动,提供切削过程中的转矩和功率,且保证任意转速的调节,完成在转速范围内的无极变速。具有c轴控制的主轴与进给伺服系统一样,为一般概念的位置伺服控制系统
闭环控制系统是采用直线型位置检测装置(直线感应同步器、长光栅等)对工作台位移进行直接测量并进行反馈控制的位置伺服系统,其控制原理见图1所示。这种系统有位置检测反馈电路,有时还加上速度反馈电路。

图1闭环伺服驱动系统

图2 永磁式同步

图3 交流内部结构
1. 交流同步伺服电机的种类
励磁式、永磁式、磁阻式和磁滞式
2. 永磁交流同步伺服电机的结构
电机由定子、转子和检测元件组成。见图2所示。其内部结构见图3所示。
3.永磁交流同步伺服电机工作原理和性能
当三相定子绕组通入三相交流电后,在定子、转子之间产生一个同步的旋转磁场,设转子为**磁铁,在磁力作用下,使转子跟随旋转磁场同步转动。
只要负载不超过一定限度,就不会出现交流失步现象,这个负载*大极限称为*大同步扭矩。
用减少转子惯量,或让电动机先低速再提高到所要求的速度等方法,解决同步电机启动困难的问题。
主要参数:额定功率、额定扭矩、额定转速等。
交流伺服电机的优点:
◆ 动态响应好;
◆ 输出功率大、电压和转速提高。
4. 永磁交流同步伺服电机的调速方法
进给系统常使用交流同步电机,该电机没有转差率,电机转速为
调速方法:变频调速
5. 交流进给伺服电机的速度控制系统
系统组成:速度环、电流环 、spwn电路、功放电路、检测反馈电路。见图4所示。

图4 交流伺服电机速度控制系统组成框图
开环控制见图1所示
特点:结构简单,步进驱动、,无位置速度反馈。

图1 开环控制伺服驱动系统
1. 结构
电机的定子和转子铁心通常由硅钢片叠成。定子和转子均匀分布着很多小齿。定子上有a、b、c三对磁极,在相对应的磁极上绕有a、b、c三向控制绕组。其几何轴线依次分别与转子齿轴线错开。见图2-5-6所示。
2. 工作原理
步进是一种把电脉冲转换成角位移的电动机。用专用的驱动向步进电动机供给一系列的且有一定规律的电脉冲信号,每输入一个电脉冲,步进电机就前其角位移与脉冲数成正比,电机转速与脉冲频率成正比,转速和转向与各相绕组的通电方式有关。
3. 步进电机的通电方式
其运行方式有:三相单三拍、三相双三拍和三相六拍。
每输入一个脉冲信号步进电动机所转过的角度称为步距角,以θs表示。
步距误差是指步进电机运行时,转子每一步实际转过的角度与理论步距角之差值。
4. 步进电机功率驱动
驱动控制电路由环形分配器和功率放大器组成。
1)环形分配器
环形分配器是用于控制步进电机的通电方式的,其作用是将数控装置送来的一系列指令脉冲按照一定的顺序和分配方式加到功率放大器上,控制各相绕组的通电、断电。环形分配器功能可由硬件或软件产生。见图2、3所示。

图2 三相硬件环形分配器的驱动控制

图3 三相软件环形分配器的驱控制
2)驱动放大电路
图4是一种高低压驱动线路。
特点:
高压充电,低压维持。
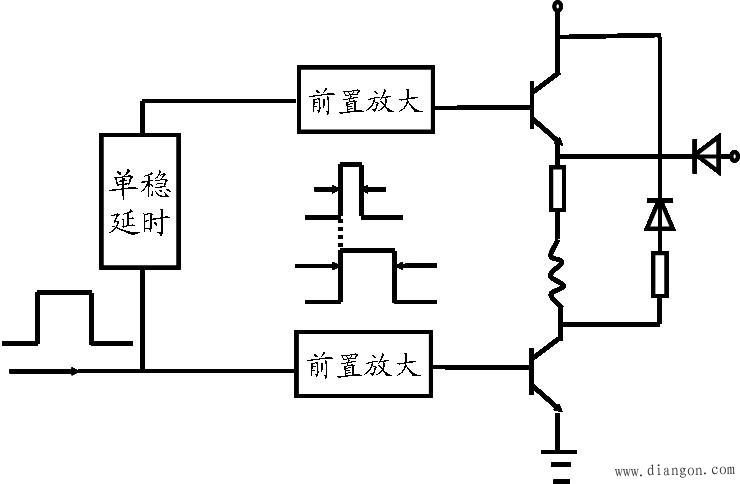
图4 高低压驱动原理
5. 主要特征
1)*大静转矩tmax
2)启动频率
3)连续运行频率
4)矩频特性
5)静态步矩误差
6. 步进电机的选择
步进电机有步距角(涉及到相数)、静转矩、及电流三大要素组成。一旦三大要素确定,步进电机的型号便确定下来了