西门子6ES7317-2AK14-0AB0现货供应
模块的接口信号有以下几组:
(1)电源接口
U1 V1 W1 主控制回路三相电输入端口 X181
工作电源的输入端口,使用时常常与主电源短接,有的系统为了让机床在断电后驱动还能正常工作一段时间,把600V的电压端子与P500
M500端子短接,这样由于600V电压不能马上放电完毕,还能维持驱动控制板的正常工作一段时间。P600M600是600V直流电压输出端子。
(2)控制接口
64控制使能输入,该信号对所有连接的模块有效,该信号取消时,所有的轴的速度给定电压为零,轴以**的加速度停车。延迟一定的时间后,取消脉冲使能63脉冲使能输入,该信号对所有连接的模块有效,该信号取消后,所有56的轴的电源取消,轴以自由运动的形式停车。
48
主回路继电器,该信号断开时,主控制回路电源主继电器断开。
112调试或标准方式,该信号一般用在传输线的调试中,一般情况接到系统的24V上。
X121
模块准备好信号和模块的过热信号。准备号信号与模块的拨码开关的设置有关,当S1.2=ON时,模块有故障时,准备好信号取消,而S1.2=OFF时,模块有故障和使能(63,64)信号取消时,都会取消准备好信号,在更换该模块的时候要检查模块顶部的拨码开关的设置,否则模块可能会工作不正常。所有的模块过载和连接的电机过热都会触发过热报*输出。
NS1/NS2
主继电器闭合使能,只有该信号为高电平时,主继电器才可能得电。该信号常用来作主继电器闭合的连锁条件。
AS1/AS2
主继电器状态,该信号反映主继电器的闭合状态,主继电器闭合时为高电平。
9/19/R
9是24V输出电压,19是24V的地,R为模块的报*复位信号。 (3)其它辅助接口
X351 设备总线 ,为后面连接的模块供电用。
X141 电压检测端子,供诊断和其它用途用。
»7: P24 ,+24V
»45:P15,+15V »44:N15,-15V
»10:N24,-24V
»15:M,0V
电源模块上面有6个指示灯,分别指示模块的故障和工作状态。一般正常情况下绿灯亮表示使能信号丢失(63和64),黄灯亮表示模块准备好信号,这时600V直流电压已经达到系统正常工作的允许值。
电源模块正常工作的使能条件:
48,112,63,64接高电平,NS1和NS2短接,显示为一个黄灯亮,其它灯都不亮。直流母线电压应在600V左右。
3.611驱动控制模块接口信号
(1)611D驱动控制模块接口信号
设备:840D数控机床
故障:840D数控系统硬盘启动出现循环重起,找不到引导文件
1.拆除硬盘,使用移动硬盘盒,可以读取到文件。
2.使用GHOST软件,在winxp系统下对硬盘做镜像文件,选择DISK to image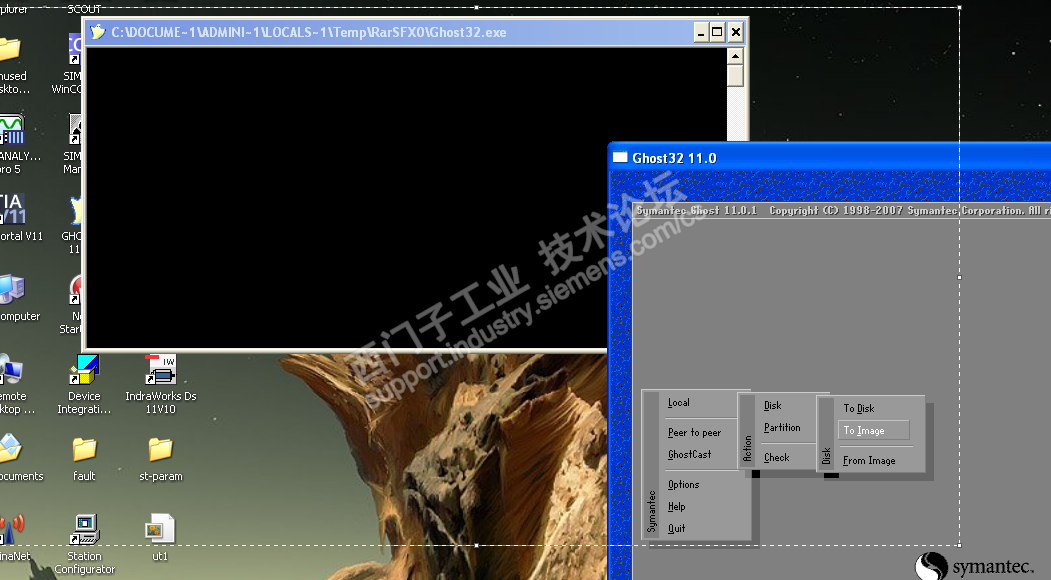
3. 选择备份的路径到:840D文件夹下。
4.将新的硬盘装到移动硬盘盒上,恢复SPARK_840D_SYS.GHO到新上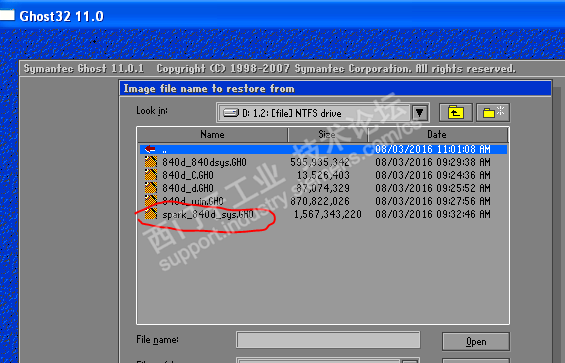
5.恢复完装到机器上测试居然能启动系统了,不可思意,而我又把旧的装上去,结果还是不好,问题就怪在这儿。
6.我又尝试把电脑上的镜像文件恢复到旧的上面去试,结果是旧的装上去也好了,又不可思意。
7.问题是在840D本身启动时进不了自身的GHOST系统,我才拆下来用电脑做镜像恢复的。
8.设备就这样给我整好了,又要去做其他事情了,那边变频器A033偶尔报*还得去修,忙呀!
611D控制模块与数控系统主要是通过一根数据总线相连,基本没有太多的接口信号。
X431:轴脉冲使能,该信号为低电平时,该轴的电源撤消,一般这个信号直接与
24V短接
X432:BERO
端子,该接口用作BERO开关信号的输入口。
X34,X35模拟输出口,其中有两个模拟口(X1,X2
)用作模块诊断测试用,它可以用来跟踪一些数字量,比如转速,电压和电流等并把它转换成0到5V的模拟电压输出,具体的输出信号可以通过数控系统选择,Ir模拟输出7口是固定输出电机R相的电流的模拟值。
X411:电机编码器接口,输入电机的编码器信号,还有电机的热敏电阻,其中电机的热敏电阻值是通过该插座的13和25脚输入,该热敏电阻在常温下为580欧,155度时大于1200欧,这时控制板关断电机电源并产生电机过热报*。(1PH7电机温度检测信号连接同1FT6/1FK6电机)
X411:直接测量系统输入口,输入直接位置测量信号,一般为正余弦电压信号
* 611D的控制板的速度环和电流环的参数设置在NCK里面,故更换控制板后不需要重新设置参数。
(2)611A控制模块接口信号
611A控制模块与1FT5电机构成伺服驱动机构,完成速度环和电流环的控制,其速度环和电流环的参数都保存在控制板上,故更换该板要注意参数的设置。接口信号如下:
X311: 电机反馈接口,电机的速度实际值和电机的热敏电阻值都通过它输入到控
制板里,1FT5电机的速度检测是通过一个测速发电机来实现的,而电机转子的位置是通过18个霍而元件来检测的。电机内的热敏电阻值是通过该插座的11和12脚信号输入,
在常温下小于250欧,当电机内部温度达到155度时电阻大约是1000欧,控制板这时关断电源,并发出报*信号。
X321:设定端子,速度的给定值通过该端子的56和14输入,一般来讲,给定值是正负0到10V的电压。
X331:使能端子:相应模块的使能信号输入,663是脉冲使能,与电源模块的63作用差不多,只是它仅作用于单个的轴模块。65是控制使能,常常把它和NC侧给定信号的控制使能相连。
X341: 模块状态输出接口,输出模块的状态信息,如模块准备好信号
PTO向导移植
S7-200 PTO向导移植至 S7-200 SMART 运动控制,移植时需要在 S7-200 SMART 中重新运行运动控制向导编程。
S7-200 SMART 运动控制向导的测量系统选择相对脉冲,如图1所示:

图1. 选择测量系统
S7-200 SMART 运动控制向导的方向控制根据实际情况可以选择“单相(1个输出)"或者“单相(2个输出)",“单相(2个输出)"有方向控制,如图2所示:

图2. 选择方向控制
CTRL 指令移植
PTOx_CTRL 指令由 AXISx_CTRL 指令替换,如图3所示:
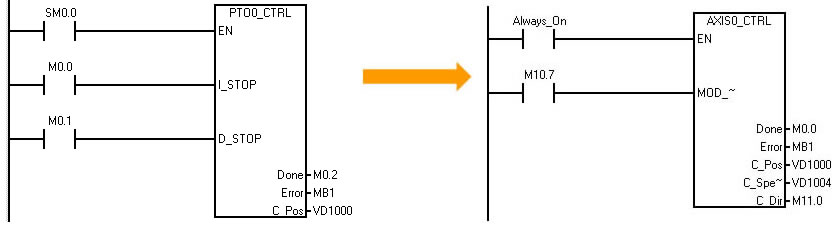
图3. CTRL指令移植
1、I_STOP参数,在S7-200 SMART运动控制向导中根据实际情况启用LMT+(正限位)、LMT-(负限位)、STP(停止点)DI点,选择响应为“立即停止",如图4所示。如果立即停止为内部变量,可以将该内部变量通过DO点控制DI点实现。

图4. 立即停止
2、D_STOP参数,在S7-200 SMART运动控制向导中根据实际情况启用LMT+(正限位)、LMT-(负限位)、STP(停止点)DI点,选择响应为“减速停止",如图5所示。如果减速停止为内部变量,可以使用MOD_EN参数替换。

图5. 减速停止
MAN 指令移植
PTOx_MAN 指令由 AXISx_MAN 指令替换,如图6所示:

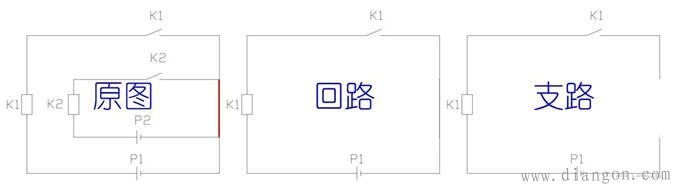
| 任何一本书籍或任何一部视频,哪怕是让一个老电工师傅向你口头传授,必然离不开“支路”、“回路”、“节点”这几个关键词。在学习之前,如果不先弄明白这几个词,就好像不认识加减乘除的符号却去研究数学一样。 而“二次回路”的概念,是供电系统中主要的研究内容。 什么是支路? 支路的概念只存在于并联电路中,简单的串联电路没有这一说法。 与“支路”相对的概念,叫做“干路”。可以将电路想象成一棵树,各个树枝,在电路中叫做“支路”;而各个树枝结合的部分,就是树干,在电路中叫做“干路”。这棵大树,它的养分供给需要经从树干,分散到各个树枝上,电路中也是一样,电流在干路汇合,之后又分散到各个支路上。 与大树不同的是,电路中的每个支路,不能仅仅能够从干路获取能量(电源),有的支路自带能量(电源)。 我们把这种自带电源的支路称之为“有源支路”;把不带电源的支路称之为“无源支路”。统称为“支路”。 举个例子▼
由于上图中两个支路都有电源(P1,P2),这两个支路都是有源支路;若上图中只有P1一个电源,则K2所在支路就成了无源支路。 什么是回路? “回路”又叫做“闭合回路”,即该路必须是闭合的,能够让电流顺利通过的。 我们用一张图来了解支路和回路的区别
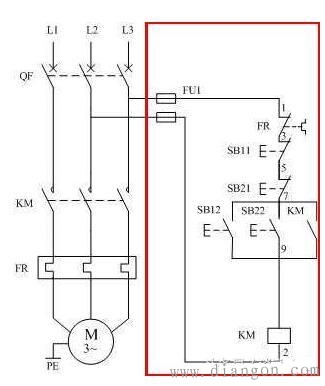
与“二次回路”相对应的是“一次回路”。 可以将其理解为对电路的二次加工,何为二次加工呢? 一颗花生,压榨成油,就是一次加工;再进行过滤,便是二次加工。 一次加工是花生油的主体,一次加工后得到了花生油,几乎不需要加工;经过了二次加工,即过滤后,花生油才变得香醇、干净。 电路中也是一样,一次回路是主回路,有了它设备就可以运转;但二次回路使得设备可以受到保护、得到监控、方便控制等。 举个例子▼
有了左侧部分,闭合开关QF时,电动机M即可运行(接触器常开触点KM属于二次回路)。有了二次回路,则可以对该电路进行两地控制。 二次回路中,又包括控制回路、测量回路、保护回路等,但这些功能通常集中在一起,很少能分得清。只在说到它的功能时,才单独使用这些名称。如上图,若是说它的控制方法时提到二次回路,可直接说控制回路 |