6ES7212-1AE40-0XB0西门子CPU1212C
常见故障:
1、编码器本身故障:是指编码器本身出现故障,导致其不能产生和输出正确的波形。这种情况下需更换编码器或维修其内部器件。
2、编码器连接故障:这种故障出现的几率 *高,维修中经常遇到,应是优先考虑的因素。通常为编码器电缆断路、短路或接触不良,这时需更换电缆或接头。还应特别注意是否是由于固定不紧,造成松动引起开焊或断路,这时需卡紧电缆。
3、编码器+5v电源下降:是指+5v电源过低, 通常不能低于4.75v,造成过低的原因是供电电源故障或电源传送电缆阻值偏大而引起损耗,这时需检修电源或更换电缆。
4、编码器安装松动:这种故障会影响位置控制 精度,造成停止和移动中位置偏差量超差,甚至刚一开机即产生伺服系统过载报警,请特别注意。
一般地,也能得到一个速度信号,这个信号要反馈给器,从而调节的输出数据。
故障现象:1、坏(无输出)时,变频器不能正常工作,变得运行速度很慢,一会儿变频器保护,显示“pg断开”(pg可以理解为变频器检测电路模块)联合动作才能起作用。要使电信号上升到较高电平,并产生没有任何干扰的方波脉冲,这就必须用来处理。编码器pg接线与参数与编码器pg之间的连接方式,必须与编码器pg的型号相对应。一般而言,编码器pg型号分差动输出、集开路输出和推挽输出三种,其信号的传递方式必须考虑到pg卡的,选择合适的pg卡型号或者设置合理。
1它主要是以高精度计量光栅为检测元件,通过光电转换;
2将轴的机械角位移信息以led光源为介质通过光栅码盘转换成相应的数字代码,用它可以实现角位移、角速度、和角加速度及其他物理量的**测量;
3.工作原理(如下图)

1:光源(led) 2:透镜(lens) 3:指示光栅 4:码盘(disk) 5:接受器(asic)
点光源(led)发出的光经过透镜(lens)的折射变成准直的平行光,通过光栅和码盘,照射到光电接受器上,如果码盘发生转动,光线就会把码盘转动的情况反应到接受器上。接受器会把这些光信号转换成电信号输出,从而以电脉冲的形式反应出物理的运动量(位移、角速度、加速度)
设 备
1.永宏: fbs-24mct 1台
2.gsk伺服1套: di20-m10b(驱动器)/80sjt-m032e(电机)
3.dc24v1个
4.信号线若干
查看驱动器引脚定义并选择控制模式
位置控制模式:查看伺服引脚定义,这里用*少的信号线实现电机转动。
son:为on时,开启伺服使能。当然伺服使能功能可以通过参数来修改,该信号可由参数pa54设置。
pa54=0:只有当外部输入信号son为on时,才能被使能;
pa54=1:驱动单元内部强制电动机使能,而不需要外部输入信号son。
ccw/cw:驱动禁止信号,一般和行程开关配合使用,避免超程,该信号可由参数pa20设置。
pa20=0:使用驱动禁止功能;
pa20=1:不使用驱动进制功能。
rdy:驱动单元准备好信号,当电机通电励磁时该信号有输出。
位置指令输入信号
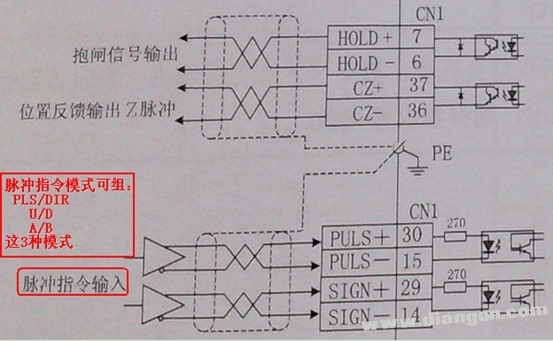
这里位置输入信号可以采用差分驱动或者单端驱动接法,由于选用的fbs-24mct为集电极开路输出形式,采用单端驱动接法。
伺服驱动单端驱动方式限定外部电源*大电压为25v时,需要串接一个限流电阻r
依据:vcc=24v,r=1.3kω~2kω;vcc=12v,r=510kω~820kω;vcc=5v,r=0;
频率限制为:
pls/dir:*高脉冲频率 500khz
u/d:*高脉冲频率 500khz
a/b:*高脉冲频率 300khz
控制线制作
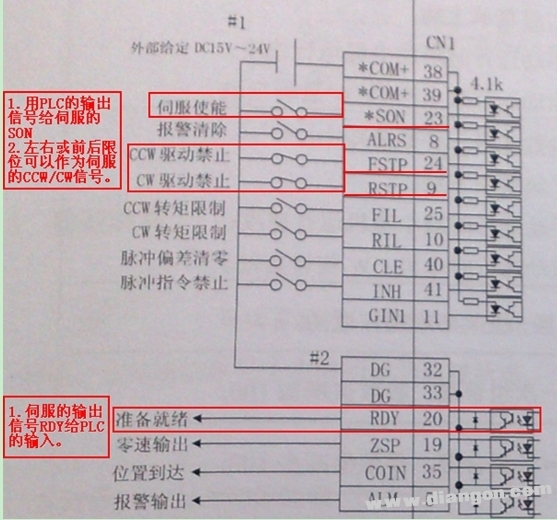
gsk随机附带一个44针插座,依据引脚图,把需要的控制信号接线出来。在这里把有可能用到的信号线都接出来,这些信号在伺服控制中并不都是必要的,下图中用蓝色线表示伺服的输出信号给plc的输入,红色表示plc的输出给伺服的输入,开关电源的正、负分别用红、蓝表示。
1)选取需要的控制信号


2)伺服同plc的接线图
这里从伺服给plc的输入信号只取了srdy,plc给伺服的信号有son、fstp(ccw)、rstp(cw)、puls/sign这几个信号。

伺服调试
·取出驱动器、电机,电机至驱动的编码器连接线和电机至驱动的电源线,出厂都已配置好,这里只要按照指示接好即可。
·把plc至驱动器的控制信号线接好。
1.伺服的手动调试
1)伺服参数设定
gsk伺服上电之后,可以先采用驱动器本身自带的手动功能,该功能模式下,伺服的转动由驱动器按键来控制,进入pa参数菜单,设置一下参数:
pa4=3:手动方式,在sr-菜单下操作,用↑、↓键进行加、减速操作。
pa20=1:驱动禁止功能无效,此时只是利用驱动器本身来调试,把ccw\cw功能先屏蔽。
pa54=1:驱动单元内部强制电机使能,而不需要外部输入信号son。
参数设置完成以后,保存后下电。
2)手动运行步骤
1.驱动器上电,显示 r - 0,是电机运行速度监视窗口。
2.检查pa1参数是否和使用的电机代码一致。
3.以上2步都无误后,进入“sr- /sr-red” 菜单下后,按↑、↓键开始运行电机。
2.plc控制运行
伺服在手动调试下运行正常,现在进入plc的上位控制,该控制中plc的从伺服引入的io如下:
bbbbb:
srdy——x2
output:
puls-: y0
sign-: y1
ccw: y2
cw: y3
son: y4
为了控制方便,这里先把ccw\cw信号使能屏蔽。
1) 伺服参数设置
pa4=0: 位置方式。
pa12:齿轮倍频系数(电子齿轮分子),设为2。
pa13: 电子齿轮分频系数(电子齿轮分母),设为1。
pa14=0:位置方式下,脉冲输入模式:脉冲+方向。
pa15=0: 位置指令方向维持原指令方向。
pa20=1: 驱动禁止功能无效(即屏蔽ccw/cw使能信号)。
pa54=0: 外部son使能。
参数修改完毕后,存储后下电,重新上电。
2) 相关计算
在这里先做一个的多段速运行程序,运动过程
1.以速度1000rpm转10圈
2.接着以速度1200rpm转20圈
3.接着以速度1400rpm转30圈
4.接着以速度1600rpm转40圈
5.接着以速度1800rpm转50圈
6.接着以额定速度2000rpm运行60圈
7.停顿一定时间后,从第1步开始重复。
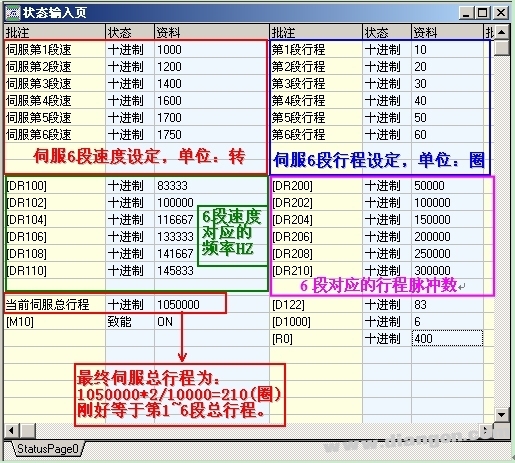
由手册知道,伺服每转1圈,编码器反馈10000ps,又电子齿轮设定为2,plc每发出5000ps,伺服就转动1圈
即第一段行程10圈对应的脉冲数=10圈×5000ps/圈=50000ps
其它段的行程脉冲计数同此式。
把伺服需要的速度转化成plc的脉冲数,以1000rpm为例,假设plc需要发出的脉冲数为x,电子齿轮设定是2,则有
得:x=83333.3hz
由此公式,可求得其它速度所对应的plc脉冲数。
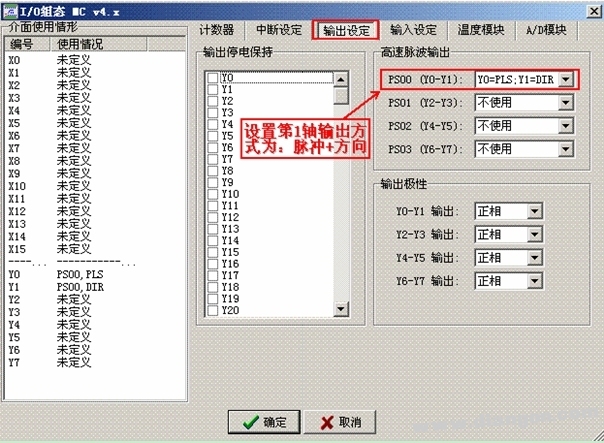
3) plc参数的设置
fbs-24mct的脉冲输出点共有4轴(8点),为y0~y7,默认y0~y3为高速200k,y4~y7为中速20k。要使得plc的高速点输出脉冲时,需要先对这几个点的输出进行组态,点击永宏编程软件菜单栏中的“专案\io组态”进入组态页面
4) 程序的编写
设置完成之后即可进入程序的编写。
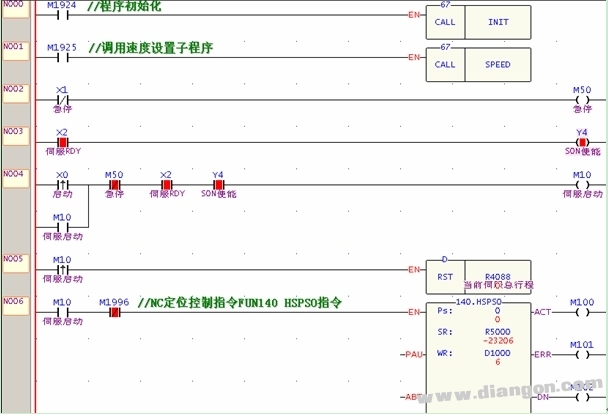

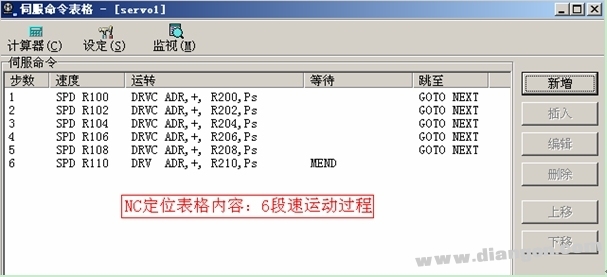
5) nc定位表格的编辑
用鼠标左键点击 fun140 指令,在英文输入状态下,按键盘上的 z 键进入nc定位表格的编写,*终结果如下
6)子程序内容
init子程序主要是做一些初始化,如下

speed子程序,主要把输入的速度和形成转化成plc所需要产生的脉冲个数,这里以第1段速度和行程的换算为例,由于这里伺服的额定转速为2000rpm,在速度设定的时候,要防止输入转数超过该值。


7) 上电运行调试
程序编写完成后,让plc处于run状态,在输入页中进行数值监控,如下
总 结
由于该示例中plc的输入信号只从伺服抓取了srdy,其它点位接线同srdy的接法一样。plc输出给伺服的信号只有pls\dir和son,其它信号的接法类似。gsk伺服只需要极少的几根控制线就可以实现伺服的运转,永宏plc的定位指令全部在nc表格中填写即可