西门子CPU 6ES7214-1HG40-0XB0型号规格
在调机过程中发现定位不准现象怎么办?把它拿下来呗!没什么可谈的是 吧!一般有以下几方面原因引起:
1、 改变方向时丢脉冲,表现为往任何一个方向都准,但一改变方向就累计偏差,并且次数越多偏得越多;
2、 初速度太高,加速度太大,引起有时丢步;
3、 在用同步带的场合软件补偿太多或太少;
4、 马达力量不够;
5、 控制器受干扰引起误动作;
6、 驱动器受干扰引起;
7、 软件缺陷;
针对以上问题分析如下:
1)一般的步进驱动器对方向和脉冲信号都有一定的要求,如:方向信号在个脉冲上升沿或下降沿(不同的驱动器要求不一样)到来前数微秒被确定,否则会有一个脉冲所运转的角度与实际需要的转向后故障现象表现为越走越偏,细分越小越明显,解决办法主要用软件改变发脉冲的逻辑或加延时。
2)由于步进电机特点决定初速度不能太高,尤其带的负载惯量较大情况下,建议初速度在1r/s以下,这样冲击较小,同样加速度太大对系统冲击也大,容易过冲,导致定位不准;电机正转和反转之间应有一定的暂停时间,若没有就会因反向加速度太大引起过冲。
3)根据实际情况调整被偿参数值,(因为同步带弹性形变较大,改变方向时需加一定的补偿)。
4)适当地增大马达电流,提高驱动器电压(注意选配驱动器)选扭矩大一些的马达。
5)系统的干扰引起控制器或驱动器的误动作,我们只能想办法找出干扰源,降低其干扰能力(如屏蔽,加大间隔距离等),切断传播途径,提高自身的抗干扰能力,常见措施:
①用双纹屏蔽线代替普通导线,系统中信号线与大电流或大电压变化导线分开布线,降低电磁干扰能力。
②用滤波器把来自电网的干扰波滤掉,在条件许可下各大用电设备的输入端加电源滤波器,降低系统内各设备之间的干扰。
③设备之间好用光电隔离器件进行信号传送,在条件许可下,脉冲和方向信号好用差分方式加光电隔离进行信号传送。在感性负载(如电磁、电磁阀)两端加阻容吸收或快速泄放电路,感性负载在开头瞬间能产生10~100倍的尖峰电压,如果工作频率在20khz以上。
6)软件做一些容错处理,把干扰带来影响消除
位置伺服系统的位置控制是将插补计算的理论位置与实际反馈位置相比较,用其差值去控制进给电机。而实际反馈位置的采集,则是由一些位置检测装置来完成。这些检测装置有旋转变压器、感应同步器、脉冲编码器、光栅、磁栅等。
对于采用半闭环控制的位置伺服系统,其闭环路内不包括机械传动环节,它的位置检测装置一般采用旋转变压器,或高分辨率的脉冲编码器,装在进给电机或者丝杠的端头,旋转变压器(或脉冲编码器)每旋转一个角度,都严格对应着运动机构移动的一定距离。测量了电机或丝杠的角位移,也就是间接测量了运动机构的直线位移。
对于采用闭环控制系统的位置伺服系统,应该直接测量工作台的直线位移,可采用感应同步器、光栅、磁栅等测量装置。由工作台直接带动感应同步器的滑动尺度的与装在机床床身上的定尺配合,测量出工作台的实际位置。
可见,位置测量装置是位置伺服系统的重要组成部分。它的作用是测量位移和速度,发送反馈信号,构成闭环或半闭环控制。的加工精度主要由检测系统的精度决定。
位移检测系统能够测量的小位移量称为分辨率。分辨率不仅取决于检钡4元件本身,也取决于测量线路。位置伺服系统对检测装置的主要要求如下:
(1)高可靠性和高抗干扰性;
(2)满足精度和速度要求;
(3)使用维护方便,适合机床运行环境;
(4)成本低。
rkd514l-c东方步进驱动器(以下简称rkd514l-c驱动器),可驱动五相步进电动机,电压ac200~230v,输出电流3.5a(可调),输出电压约150v。设备端子及调整部件功能、控制端子、主端子接线等见以下图表。
1、rkd514l-c驱动器端子、调整部件功能、端子接线
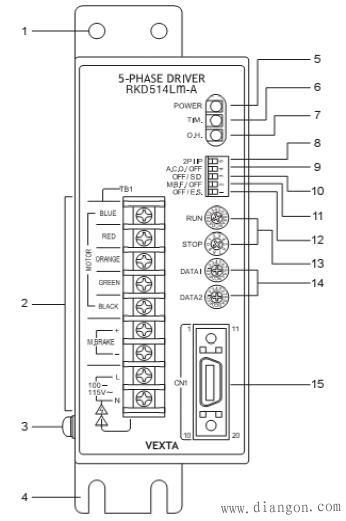
图1 rkd514l-c驱动器接线端子及调整部件图
rkd514l-c驱动器接线端子及调整部件功能说明(见表4-1)
上述(图1、图2、图3)图表(表4-1),是在检修设备之前,要尽量掌握的相关“知识储备”,如控制端子功能和相关调整部件的作用,则是检修中必须要掌握的,检修内容将与之发生紧密的关联。输出状态取决于部件的设置与调整,有时人为的调错,会使机器产生“故障”,检修人员应该区分故障的真假,可以通过调试手段,将一些“伪故障”排除掉。
2、mcu主板电路之一
如图4所示电路,包含了mcu基本工作电路、控制端子信号输入/输出电路和功能整定电路。
〔mcu基本电路〕+5v电源,接入mcu的相关供电引脚;晶振元件xl101与振荡电路ic106、ic110生成的脉冲信号,做为时钟信号输入mcu的120脚;r184、d103、c136和ic108(hc14)内部两组反相器电路,组成上电复位电路,在cpu上电瞬间提供一个低电平的复位脉冲,输入mcu的122脚,使mcu内部计数器、寄存器清零。以上电路提供mcu正常工作的基本条件。
〔控制端子信号输入/输出电路〕外部输入的4路控制信号经cn101插座进入。高速光耦合器件pc101、
表4-1 rkd514l-c驱动器接线端子及调整部件功能说明


图2 rkd514l-c驱动器电源、步进电动机接线图
pc102(tlp750)承担着对转速(脉冲)信号和正/反转控制信号的传输任务,输出信号再经两级反相器电路,输入至mcu的7、8脚。这是两路基本控制信号;另两路控制信号经光耦合器pc103、pc104(p781)进行隔离传输,其中一路控制信号为调机信号on/off指令,确定停车时马达处于直流刹车还是自由停车状态,两路信号输入至mcu的5、6脚。
步进电动机驱动器的逆变功率输出电路,设有温度检测电路,其输出的温度检测信号进入mcu,达到热保护电平阈值时,mcu从1脚输出过热故障信号,控制晶体管q101导通,进而驱动光耦器pc107,向外部控制电路送出故障报警信号。mcu的40、42、43等3脚,输出电源、过热、激磁中等工作状态信号,驱动指示灯电路,用于工作/故障状态的指示。

图3 rkd514l-c驱动器控制端子(经附件端子排)接线图
〔功能整定电路〕拨码开关sw103含3只独立开关,调整开关的on/off状态,可进行如上表4-1中的8、9、10项功能整定;sw101、sw102、sw104是3只16档位的4位数字开关,开关为5引脚器件,其中0脚接地,1~4脚分别接有+5v上拉电阻,当1~4中的某一个脚或几个脚与0脚接通(即整定档位不同)时,依次产生0000~1111的4位数字信号,输入至cpu的相关引脚。cpu可根据输入位信号的不同,判断用户整定值的大小,控制步进角和输出电流的大小,其整定内部见上表4-1中的13、14项。
mcu主板和电源/驱动板之间,经cn1-2、cn1(印刷)端子排相连接,两端子排的序号不一致,上图中在顶部给出了两端子排的连接图示,经方便检修与测试中的参考。在进行电路原理分析时,请将图4与图5结合起来,请理顺信号流程。
逆变功率电路的取用电源,并非直接从ac220v市电整流所得的dc280v电源,而是经功率模块内部斩波电路变换所得的约120v~150v左右的直流电源,斩波电路所需的pwm信号的生成和对120v~150v逆变电源是否正常的检测(关系到逆变功率电路能否正常工作),成为mcu主板电路需要完成的重要任务。
集成pwm控制器ic113(mb3795)与外围,组成的pwm脉冲形成电路,在mcu控制信号和逆变电源反馈信号作用下,其输出pwm脉冲信号,控制功率模块内部斩波管(图4-26中模块内部的vt)的导通与截止,使逆变功率电源得到一个适宜和稳定的供电电源。mb3795芯片的内部电路结构及原理分析如下:
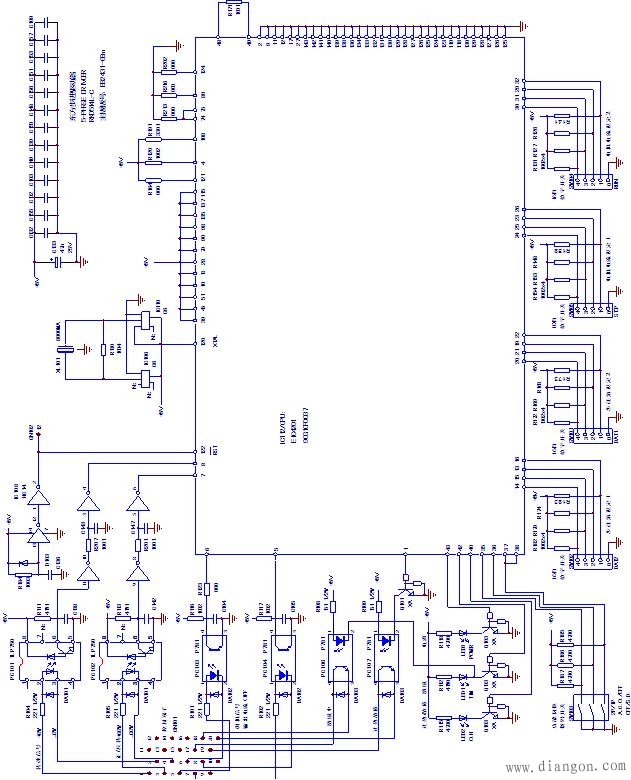
图4 rkd514l-c驱动器mcu主板电路之一
3、mcu主板电路之二

图5 rkd514l-c驱动器mcu主板电路之二
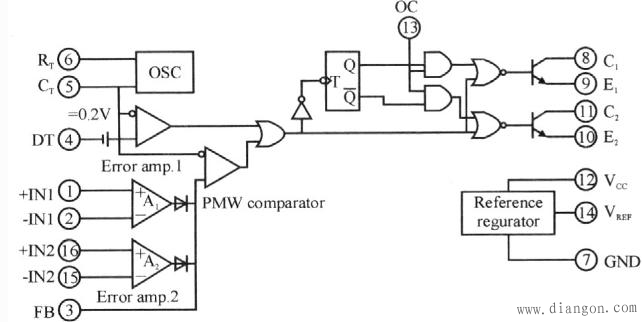
图7 集成pwm控制器mb3795内部功能框图
mb3759芯片内部电路主要由高频振荡器、pwm比较器、基准电压源、误差电压放大器、驱动电路和封锁电路等组成。控制芯片内部有2个电压比较器,管脚1、2和15、16是电压比较器正负输入端子,管脚3是电压比较器统一输出端。误差放大器的输出也可开放给用户,用户可以根据需要设计成pi控制器。管脚5、6可接振荡和电阻,振荡器的振动频率由外接电阻和电容决定。管脚8为触发脉冲输出口,采用电流图腾柱输出,使得芯片可以直接驱动功率不大的开关管。(原文来自:http://www.diangon.com/)t触发器的作用是将输出进行分频,得到占空比为50%的频率为振荡器频率的l/2的方波,将t触发器输出的这样两路互补的方波同比较器输出pwm信号进行“或非”运算,就可以得到两路互补的占空比为o~50%的pwm信号,考虑死区时间的存在,大占空比通常为45%~47.5%。管脚13为封锁控制,管脚14为参考电压,管脚12为工作电压,管脚4为死区控制端,一旦高电平输入,芯片输出脉冲被封锁,直流电压输出为零。
结合图5中ic113的实际电路组成,简述一下pwm脉冲形成电路的工作原理(试分析)。ic113的5、