西门子6ES7 211-1BE40-0XB0型号介绍
电机定子的每两个相对的极组成一相,极上绕组反向串联,以此形成n—s极。电机的转子因周上均相40个小齿,故其齿距角θz=360°(1/40)=9°。
(1) 单三拍工作;
(2) 双三拍工作;
(3) 单-双三相六拍工作;
(4) 多段磁阻式步进电机。多段磁阻式步进电机沿着它的轴向长度分成性能
上独立的几段,每一段都用一组绕组激磁,形成一相。三相电机有三段。电机的每一段都有一个定子,它们固定在外壳上,转子制成一体,并由电机两端的轴承支撑;为了与外部负载连接,转子上有一根伸出来的轴。每段定子上都有许多磁极。相绕组绕在这些极上;相邻磁极以反向缠绕,使得磁极的径向磁场方向沿电机的轴向长度看,每段的转子齿都是排齐的,但不同段所对应的定子齿之间有不同的相对位置。a段里的定子齿和转子齿相对齐 (设初a相通电),b段和c段里的定子齿与转子齿则不对齐。若激磁从a相变化到b相,结果将使b段里的定子齿和转于齿对齐,转子转动一步。去掉b相励磁而激励c相,则电机以同一方向再走一步。再激励a相,则再走一步,a段里的定子齿和转子齿再一次完全对齐。

图1多段磁阻式步进电机
激磁的三次变化使转子转动三步或一个转子齿距;不断按序改变激磁,电机就可连续旋转。这就是多段电机的基本工作原理。
段数增多对制造者来说很方便,相绕组越多,需要的驱动电路也越多,付出的驱动电路费用随之增加。另一方面,段数大于3时,实际性能并没有太多改善。
转子上安装磁钢的叫做永磁式步进电机,如永磁式爪极步进电机和转子上安装磁钢的混合式步进电机。

(a)剖视图 (b)磁化极性
图1 永磁式爪极步进电机
永磁式爪极步进电机的剖视图如图1(a)所示。它的定子由几个金属盒叠成,齿由圆形金属片冲出。将这个圆片拉成钟状,齿被拉到里面形成爪圾。定子的每一段由连结在一起的两个钟型罩壳构成,两者的齿相互相“啮合”。金属盒里面绕有激磁线圈。在这种电机里,定子齿或爪极由在定子线圈里流过的电流产生不同极性的磁场。转子的图柱形磁钢具有如图1(b)所示的磁化极性。对7.5°步距而言,典型的极数为24。这种类型的电机通常有两段。若两个定子段里的转子磁化状态是对齐的,则两段里的定子齿将错开l/4齿距。激磁线圈可以以双向通电的两相方式或单向通电的四相方式绕制。以四相方式绕制时,相l和相3形成双线绕组,放在a段里。相2和相4双线绕组放在b段里。相l和相3以产生符号的磁极极性的方式连接;相2和相4也如此。图2是四相方案和两相方案的励磁时序。在两相方案中,外加的电流是交流方波。利用图3可说明这种电机以两相排列时的工作原理。观看a段里转子磁极和定子齿的位置关系。开始,转子处在状态(1)位置。以正向电流激励a相,产生图中所示的磁极。很明显,依靠磁力线的张力,转子将向左运动。状态(2)是a相受正向激磁的平衡位置。下一步,a相截止,b相以正向电流激磁。因为b段里的定子齿相对a段里的齿错开l/4齿距,故转子将在同一方向受到驱动。状态(3)是这次激磁的结果。为了使转子向左运动,应撤消b相激励,并以反向电流使a相励磁。于是,转子转到下一个状态(4),…。这就是它的步进动作过程。

(a)四相(b)两相
图2电流时序 图3两相排列动作过程
爪极电机具有制造成本低等优点,故应用比较广泛。如:用作送纸机构和字车机构的动力源,小规模磁盘驱动器中的磁头驱动电机等。
与磁阻式一样,混合式电机也由定子和转子两部分组成。常见的定子有8个极或4个极,极面上均布一定数量的小齿,极上线圈能以两个方向通电,形成a相和a相,b相和b相。它的转子也由圆周上均布一定数量小齿的两块齿片等组成。这两块齿片相互错开半个齿距。两块齿片中间夹有一只轴向充磁的环形磁钢。很明显,同一段转子片上的所有齿都具有相同极性,而两块不同段的转子片的极性图1是电机里两种磁场通路的示意图。
图1(a)是由转子上的磁钢磁场产生的磁通回路;图1(b)是在电机x、y两处剖开的剖面图。每相绕组绕在8个定子磁极中的4个极上,如:绕组a绕在1、3、5、7磁极上,则绕组b绕在2、4、6、8磁极上;每相相邻的磁极以方向绕,即,如果绕组a以正向电流激励,则3和7磁极的磁场径向向外,而l和5磁极的磁场径向向内。b相与a相的情况类似。整个电机的通电情况与磁场方向可用表1概括。其电机里的转矩,由气隙中的两种磁场共同作用产生。
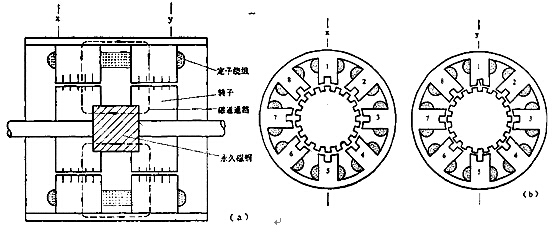
图1 混合式步进电机的剖面图
(a)平行轴的剖面 (b)垂直轴的剖面

表1 电机的通电情况与磁场方向表
图2为四相混合式步进电机以圆周展开的剖面模型。上图是转子s极所处的剖面,下图是n极所处剖面。图中,定子齿距和转子齿距相同。先考虑磁极ⅰ和磁极ⅲ下面的磁场。定子线圈通电后,磁极ⅰ产生n极,磁极ⅲ产生s极。它们构成的磁场分布情况如实线所示。同一图中的虚线表示磁钢产生的磁通通路。
因为n极这段的转子齿和s极转子齿相互错开

图2四相混合式步进电机工作原理剖面图
半个齿距,仅靠定
子电流磁场并不能像磁阻式电机那样产生有意义的转矩。把磁钢产生的磁场叠加上去,情况完全变了。因为磁极ⅰ下面的两个磁场相互增强,将产生朝左的驱动力;而磁极ⅲ下而的两个分量相互抵销,向右的力大大削弱。同理下图中,磁极ⅲ下面的定子磁场和转子磁场方向相同,磁极ⅰ下面的磁场方向也产生同样方向的力,终得到向左的合力。转子在驱动力的作用下,将转过1/4齿距,驱动力降为零,达到平衡位置。
如果切断磁极ⅰ、ⅲ的激磁,向磁极ⅱ、ⅳ的线圈通入电流,分别产生s极和n极。转子将向左再走一步。按照特定的时序激磁,如:a—b—a—b—a一…,电机就能沿逆时针方向连续旋转。改变激磁时序,以a—b—a—b—a一…激磁,电机将沿顺时针方向连续旋转。
典型的混合式步进电机是四相200步的电机,步距角为1.8°;当然,也有象3.6°、2°或5°步距角的混合式电机。混合式电机的一个完整激磁周期常由四个状态组成,转子转动四步。这时,步距角θb为:θb=360/(mz ) (°)
可将混合式电机与磁阻式电机作一比较。系统设计者选用哪种电机全由应用决定。说某种型式好,这是不妥当的。(http://www.diangon.com/版权所有)通常,对给定的电机体积,混合式电机产生的转矩比磁阻式电机大;加上混合式电机的步距角常做得较小,在工作空间受到限制而需要小步距角和大转矩的应用中,常常可选用混合式电机。混合式电机的绕组未受激磁时,磁钢所产生的磁通能产生自定位转矩。这比一组或多组绕组激磁时的转距小很多,但它确实是一种很有用的特性:供电切断时,仍然能保持转子的原来位置。磁阻式步进电机,因为它的转子上没有磁钢,转子的机械惯量比混合式电机的转子惯量低。因为转子惯量常常是电机总惯量的主要部分,转子惯量小,可以更快加速。当负载需要移动相当大距离时,如电机转几转,则使用大步距角的磁阻式电机可以减少步数。
这种电机也叫做sawyer直线,如图1所示。该电机由上下两部分组成。上面的可动部分称为动子,下面的固定部分称为定子。
定子部分是用铁磁材料做成的平板条。平板条的上平面铣有槽形或齿形,槽里浇注环氧树脂后与平面一起磨平。动子由一块磁钢pm和两个ⅱ型电磁铁ema相emb组成。电磁铁ema和emb各有二个小极,分别相对于定子齿错开半个齿距。在ema和emb上均绕有激磁线圈。当绕组中无激磁电流时,磁钢产生的磁通均等地通过四个极,与定子齿形成闭合磁路。当绕组中通入电流时,电磁铁每个小极上的绕组所产生的磁通与磁钠的磁通大小相等。
动子与定子相对的表面上也有槽,槽中也浇注环氧树脂并磨平。在动子表面上还开有若干小孔,这些小孔与外界的压缩空气皮管相通。当从外界打入压缩空气时,借助空气压力以克服由于磁钢和定子的吸力,将动子悬浮在定子表面。
这种直线步进电机利用具有一定规律变化的电磁铁与磁纲的复合作用形成步进运动。具体运行过程如图1所示。图1(a)中,电磁铁emb通入正脉冲电流,ema无电流,因电磁铁a的小极1、小极2中只有磁饲产生的磁通。而电磁铁b的小极4上磁通抵消,小极3叠加。因小极3磁性强,故与定子齿对齐。图1(b)中,电磁铁b切断,a通入负脉冲电流。此时小极2上磁通大,与定子齿对齐,动子左移1/4齿距。图1 (c),电磁铁a切断,c进入负脉冲电流,动子再左移l/4齿距。因1 (d),b切断,a进入正脉冲电流,动子再左移l/4齿距。每次切换,动子都移动l/4齿距。不断切换,则连续前进。这就是这种直线电机的基本工作原现。
很明显,利用这种电机可做成作平面运动的直线步进电机。这时,动子由两个垂直放置的直线步进电机构成。
图1 sawyer直线步进电机