6ES7516-2PN00-0AB0安装调试
监控定时器( Watchdog)又称看门狗,它的定时时间为300ms,每次扫描它都被自动复位一次,正常工作时如果扫描周期小于300ms,监控定时器不起作用。如果强烈的外部干扰使PLC(可编程序控制器)偏离正常的程序执行路线,监控定时器不再被周期性地复位,定时时间到时,PLC(可编程序控制器)将停止运行。
在以下情况下扫描周期可能大于300ms,监控定时器会停止执行用户程序:
(1)用户程序很长。
(2)出现中断事件时,执行中断程序的时间较长。
(3)循环指令使扫描时间延长。
为了防止在正常情况下监控定时器动作,可将监控定时器复位(WDR)指令插入到程序中适当的地方,使监控定时器复位。如果FOR/NEXT循环程序的执行时间可能超过监控定时器的定时时间,可将WDR指令插入到循环程序中。条件跳转指令JMP若在它对应的标号之后(即程序往回跳),可能因连续反复跳步使它们之间的程序被反复执行,总的执行时间超过监控定时器的定时时间。为了避免出现这样的情况,可在JMP指令和对应的标号之间插入WDR指令。
使用WDR指令后,在终止本次扫描之前,下列操作将被禁止:
(1)通信(自由口模式除外)。
(2)I/O更新(立即I/O除外)。
(3)强制更新。
(4)SM位更新(不能更新SM0,SM5~SM29)。
(5)运行时间诊断。
(6)在中断程序中的STOP指令。
(7)如果扫描时间超过25s,10ms定时器和lOOms定时器不能正确累计时间。
如果将PLC CPU的方式开关切换到STOP位置,1.4S内CPU转到停止模式
西门子伺服电机作为一种闭环控制的系统,和现代数字控制技术有着本质的。在目前国内的数字控制系统中,步进电机的应用十分广泛。随着全数字式交流伺服系统的出现,交流伺服电机也越来越多地应用于数字控制系统中。为了适应数字控制的发展趋势,运动控制系统中大多采用步进电机或全数字式交流伺服电机作为执行电动机。两者在控制方式上相似(脉冲串和方向信号),但在使用性能和应用场合上存在着较大的差异。
现就二者的使用性能作一比较。
一、控制精度不同两相混合式步进电机步距角一般为1.8°、0.9°,五相混合式步进电机步距角一般为0.72°、0.36°。也有一些高性能的步进电机通过细分后步距角更小。如三洋公司(SANYODENKI)生产的二相混合式步进电机其步距角可通过拨码开关设置为1.8°、0.9°、0.72°、0.36°、0.18°、0.09°、0.072°、0.036°,兼容了两相和五相混合式步进电机的步距角。交流伺服电机的控制精度由电机轴后端的旋转编码器保证。以三洋全数字式交流伺服电机为例,对于带标准2000线编码器的电机而言,由于驱动器内部采用了四倍频技术,其脉冲当量为360°/8000=0.045°。对于带17位编码器的电机而言,驱动器每接收131072个脉冲电机转一圈,即其脉冲当量为360°/131072=0.0027466°,是步距角为1.8°的步进电机的脉冲当量的1/655。
二、低频特性不同步进电机在低速时易出现低频振动现象。振动频率与负载情况和驱动器性能有关,一般认为振动频率为电机空载起跳频率的一半。这种由步进电机的工作原理所决定的低频振动现象对于机器的正常运转非常不利。当步进电机工作在低速时,一般应采用阻尼技术来克服低频振动现象,比如在电机上加阻尼器,或驱动器上采用细分技术等。交流伺服电机运转非常平稳,在低速时也不会出现振动现象。交流伺服系统具有共振抑制功能,可涵盖机械的刚性不足,并且系统内部具有频率解析机能(FFT),可检测出机械的共振点,便于系统调整。
三、矩频特性不同步进电机的输出力矩随转速升高而下降,且在较高转速时会急剧下降,其zui高工作转速一般在300~600RPM。交流伺服电机为恒力矩输出,即在其额定转速(一般为2000RPM或3000RPM)以内,都能输出额定转矩,在额定转速以上为恒功率输出。
四、过载能力不同步进电机一般不具有过载能力。交流伺服电机具有较强的过载能力。以山洋交流伺服系统为例,它具有速度过载和转矩过载能力。其zui大转矩为额定转矩的二到三倍,可用于克服惯性负载在启动瞬间的惯性力矩。步进电机因为没有这种过载能力,在选型时为了克服这种惯性力矩,往往需要选取较大转矩的电机,而机器在正常工作期间又不需要那么大的转矩,便出现了力矩浪费的现象。
五、运行性能不同步进电机的控制为开环控制,启动频率过高或负载过大易出现丢步或堵转的现象,停止时转速过高易出现过冲的现象,为保证其控制精度,应处理好升、降速问题。交流伺服驱动系统为闭环控制,驱动器可直接对电机编码器反馈信号进行采样,内部构成位置环和速度环,一般不会出现步进电机的丢步或过冲的现象,控制性能更为可靠。
六、速度响应性能不同步进电机从静止加速到工作转速(一般为每分钟几百转)需要200~400毫秒。交流伺服系统的加速性能较好,以山洋400W交流伺服电机为例,从静止加速到其额定转速3000RPM仅需几毫秒,可用于要求快速启停的控制场合。,交流伺服系统在许多性能方面都优于步进电机。但在一些要求不高的场合也经常用步进电机来做执行电动机。在控制系统的设计过程中要综合考虑控制要求、成本等多方面的因素,选用适当的控制电机
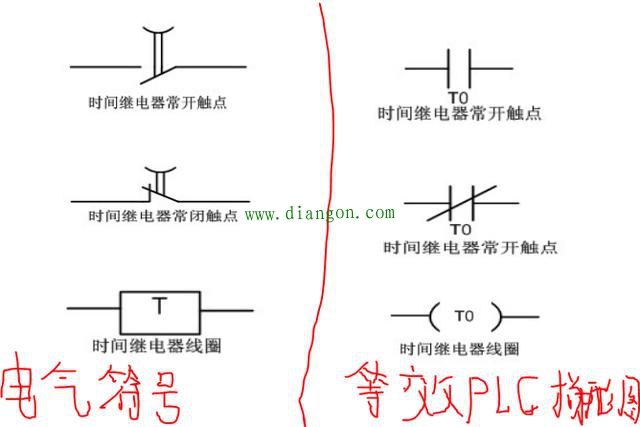
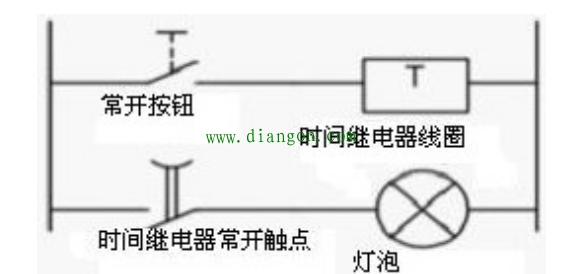
| 时间继电器又叫延时继电器,功能介绍:当加入(或去掉)输入的动作信号后,其输出电路需经过规定的准确时间才产生跳跃式变化(或触头动作)的一种继电器,时间继电器按功能分为接通延时、断开延时、瞬动延时等
|

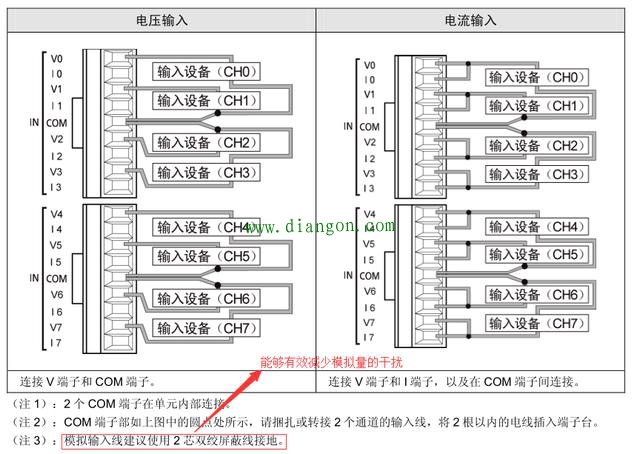
| 在自动化设备的控制中,对于温度,压力等一些变量的采集,我们一般采用的是模拟量。模拟量不同于I/O,我们通常所说的I/O为数字量,数字量只有两个状态,要么为ON,要么为OFF。而模拟量是在一定范围内连续变化的量。那么我们应该怎样对控制系统中的模拟量进行处理呢?下面就跟随小编一起学习一下吧。 我们需要知道的是模拟量分为模拟量输入和模拟量输出两种,采集外部的压力,温度等我们要使用模拟量输入单元,通过调整给定元器件的电压或者电流,我们要选择模拟量输出单元。那么对于松下FP0R系列plc,我们的模拟量控制单元都有哪些呢?
|