6ES7214-1HF40-0XB0安装调试
1. 编程软件
西门子公司针对SIMATIC系列PLC提供了很多种的编程软件,主要有STEP MICRO/DOS和STEP MICRO/WIN;STEP mini;标准软件包STEP7
S7系列的PLC的编程语言非常丰富,有LAD、STL、SCL、GRAPH、HIGRAPH、CFC等。用户可以选择一种语言编程,如果需要,也可以混合使用几种语言编程。
2. 程序结构
程序结构主要适用与S7-3000和S7-400,他有线性编程、分步式编程和结构化编程等3种编程方法。
FPI系列可编程控制器是日本松下电工公司的小型PLC产品。
FPI编程软件及指令系统
1.编程方式
NPST-GR提供了3种编程方式:梯形图方式;语句表方式和语句表达方式。
2.注释功能
NPST-GR可以为I/O继电器和输出点加入注释,使用户对继电器所对应的设备及继电器的用途一目了然。
3.程序检查
NPST-GR能查找程序中语法的错误和进行程序校验
4.监控
NPST-GR能监控用户编制的程序,并可以进行运行测试。用户可以检查继电器、寄存器和PLC工作状态,方便的进行调试与修改。
5.系统寄存器设置
NPST-GR可设置N0.0-N0.418系统寄存器的内容,根据屏幕的提示信息进行选择或输入,简单方便。
6.I/O和远程I/O地址分配
用NPST-GR可以为主机扩展板上每个槽分配I/O和远程I/O地址
7.数据管理
数据管理可以将程序或数据存盘,用于数据备份,或在传入PLC之前暂存数据
两者在编程的应用上还有就是西门子的是单母线,而日本松下的是双母线;
还有就是西门子和日本松下的输入和输出也不同的,日本松下的输入就只有X,输出就只有Y。
其实语言是相通的,就是方法不同,两个可以相互转换。
一、内部主电路结构
采用“交-直-交"结构的低压变频器,其内部主电路由整流和逆变两大部分组成,如图1所示。从R、S、T端输入的三相交流电,经三相整流桥(由二极管D1~D6构成)整流成直流电,电压为UD。电容器C1和C2是滤波电容器。6个IGBT管(绝缘栅双极性晶体管)V1~V6构成三相逆变桥,把直流电逆变成频率和电压任意可调的三相交流电。
图1变频器内部主电路
二、均压电阻和限流电阻
图1中,滤波电容器C1和C2两端各并联了一个电阻,是为了使两只电容器上的电压基本相等,防止电容器在工作中损坏(目前,由于技术的进步,低压(380V)变频器的电解电容大多数可以不需要串联使用了)。在整流桥和滤波电容器之间接有一个电阻R和一对接触器触点KM,其缘由是:变频器刚接通电源时,滤波电容器上的电压为0V,而电源电压为380V时的整流电压峰值是537V,这样在接通电源的瞬间将有很大的充电冲击电流,有可能损坏整流二极管;端电压为0的滤波电容器会使整流电压瞬间降低至0V,形成对电源网络的干扰。为了解决上述问题,在整流桥和滤波电容器之间接入一个限流电阻R,可将滤波电容器的充电电流限制在一个允许范围内。如果限流电阻R始终接在电路内,其电压降将影响变频器的输出电压,也会降低变频器的电能转换效率,滤波电容器充电完毕后,由接触器KM将限流电阻R短接,使之退出运行。
三、主电路的对外连接端子
各种变频器主电路的对外连接端子大致相同,如图2所示。其中,R、S、T是变频器的电源端子,接至交流三相电源;U、V、W为变频器的输出端子,接至电动机;P+是整流桥输出的+端,出厂时P+端与P端之间用一块截面积足够大的铜片短接,当需要接入直流电抗器DL时,拆去铜片,将DL接在P+和P之间;P、N是滤波后直流电路的+、-端子,可以连接制动单元和制动电阻;PE是接地端子。
图2主电路对外连接端子
四、变频系统的共用直流母线
电动机在制动(发电)状态时,变频器从电动机吸收的能量都会保存在变频器直流环节的电解电容中,并导致变频器中的直流母线电压升高。如果变频器配备制动单元和制动电阻(这两种元件属于选配件),变频器就可以通过短时间接通电阻,使再生电能以热方式消耗掉,称做能耗制动。当然,采取再生能量回馈方案也可解决变频调速系统的再生能量问题,并可达到节约能源的目的。而标准通用PWM变频器没有设计使再生能量反馈到三相电源的功能。如果将多台变频器的直流环节通过共用直流母线互连,则一台或多台电动机产生的再生能量就可以被其他电动机以电动的方式消耗吸收。或者,在直流母线上设置一组一定容量的制动单元和制动电阻,用以吸收不能被电动状态电动机吸收的再生能量。若共用直流母线与能量回馈单元组合,就可以将直流母线上的多余能量直接反馈到电网中来,从而提高系统的节能效果。,在具有多台电动机的变频调速系统中,选用共用直流母线方案,配置一组制动单元、制动电阻和能量回馈单元,是一种提高系统性能并节约投资的较好方案。
图3所示为应用比较广泛的共用直流母线方案,该方案包括以下几个部分。
图3变频器的公用直流母线
1.三相交流电源进线
各变频器的电源输入端并联于同一交流母线上,并保证各变频器的输入端电源相位一致。图3中,断路器QF是每台变频器的进线保护装置。LR是进线电抗器,当多台变频器在同一环境中运行时,相邻变频器会互相干扰,为了消除或减轻这种干扰,为了提高变频器输入侧的功率因数,接入LR是必须的。
2.直流母线
KM是变频器的直流环节与公用直流母线连接的控制开关。FU是半导体快速熔断器,其额定电压可选700V,额定电流必须考虑驱动电动机在电动或制动时的大电流,一般情况下,可以选择额定负载电流的125%。
3.公共制动单元和(或)能量回馈装置
回馈到公共直流母线上的再生能量,在不能被吸收的情况下,可通过共用的制动电阻消耗未被吸收的再生能量。若采用能量回馈装置,则这部分再生能量将被回馈到电网中,从而提高节能的效率。
4.控制单元
各变频器根据控制单元的指令,通过KM将其直流环节并联到共用直流母线上,或是在变频器故障后快速地与共用直流母线断开
| plc是什么? 我次见PLC是欧姆龙的,是那种大型的控制系统,但当时并不知道这是什么,如果有人见过上海人造板机械的人肯定知道那里面的欧姆龙plc,后来在百度我知道了PLC这个名词,用中文来说叫做“可编程逻辑控制器。 对plc的作用我并是很了解,直到有一次在厂里有个工友告诉我这个占地十几亩的机器就是靠这个东西控制的,我还可以随意的控制外面的机器,当时外面的机器没有生产,他随手在板砖上按了按,大吼一声“机器人变身”外面那个庞然大物(多层压机),哐当一下就开始上升,我被这神奇的表演震撼住了,当初真的很震撼,我就开始对这个PLC超级感兴趣。 至此我知道了,PLC就是控制机器的大脑,等同于电脑的CPU。 有了它你就能随心所欲的控制你想控制的机器,不用再去像继电器控制系统一样,继电器控制要是想实现某个功能就必须把线改来改去,极不方便,且容易出错,用在大型控制上就更是浪费时间,总归就是费力不讨好。 而PLC则是靠内部逻辑改变来控制外部设备,当然也少不了继电器的功劳,但改线的几率大大的降低了,节约成本。 而我就是依靠这个板砖入的PLC这道大门槛,现在也在门槛上。
|
施耐德plc通讯的套路就是三个功能块,ADDM ,READ_VAR,WRITE_VAR,下面分别介绍
1、ADDM
ADDM功能块是地址转换,就是把PLC 的物理地址转换成PLC可识别的地址类型,这句话比较拗口,通俗讲,就是把字符串型变量,转换成ADDRESS 型变量,我们还是看例子
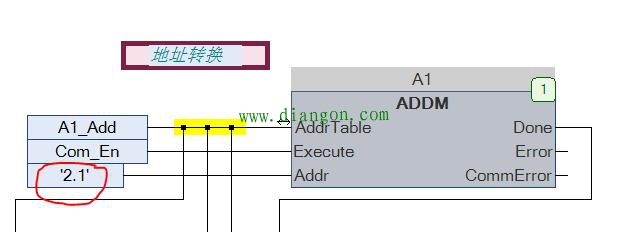
图一 ADDM功能块
如图一,图中红色圆圈内就是一个字符串型变量 '2,1' 个数字2表示PLC 的串口2,第二个数字1 表示读取的从站地址,也就是变频器的地址,而此功能块就是把此地址转换成ADDRESS型变量 A1_Add。也许你会有疑问,为什么这么做?我也不知道,此款PLC就是这样,这就是它的套路,对于此种套路,我们只能牢记。在其他PLC特别是日系,一般是通过设置参数的方式实现,也有使用指令的。
还有一点,黄色荧光笔部分的三个黑点,是表示电路相通,而它正是把转换好的地址赋值给下面我们要介绍的功能块。也就是说,读写功能块读取或写入变量的从站地址就是使用变量A1_Add。
2 、WRITE_VAR
此功能块是用于往从站写数据,也就是写入变频器的运行频率。
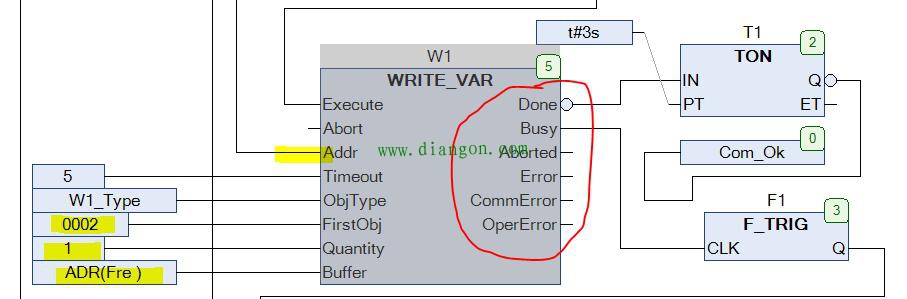
图二 WRITE_VAR 功能块
这个功能块的信息量就很大了,我们一点点分析
1 看黄色荧光笔部分 Addr,这个就是从站的地址,也就是变频器的地址,它是一个ADDRESS型变量,就是我们在ADDM功能块中转化的,就是图一的那三个黑点,就是连接到此处的,这也是CFC的优点,要用的变量轻松一连,而在FBD或是LD 中,我们就要建立一个中间变量传递一下了。
2 下面三处用荧光笔表示的 就是此功能块的精髓了,它表示往变频器的地址0002开始写入一个WORD型变量,而写的这个数值放在PLC变量Fre里,这就是这个功能块的目的,也是此次通信的目的,执行结果,就是把PLC变量Fre的值,写到了变频器的0002里面。当然,此处我们只写入了一个WORD,其实此功能块是支持一次写入125个的,因为Quantity是一个SINT型变量。Fre是一个数组型变量,当我们要一次写入很多数值的时候,用数组就很方便了。
此处有个知识点,通信只能读取或是写入WORD型变量,而WORD型变量的值只能是正数,当我们要读取或是写入负数的时候,该怎么办呢?大家可以思考一下。
3 右边红色圆圈是功能块的输出,它表示了功能块执行的各种状态,它是标准的PLCopen信号(关于PLCopen以后会详细介绍,只介绍与此功能块有关的)
Done 表示功能块执行正常后置为TRUE,此处,我们取它的反信号来监控通信状态,如果超过3S没有Done信号,我们可以认为此次写入失败,那么就代表通信失败。
Busy表示功能块执行情况的输出,如果为高电平,表示功能块正在执行。我们读取它的下降沿,来触发下一次操作。
Error是功能块的错误,可能你会有疑问,为什么通信错误不用这个信号呢?其实这个错误表示的范围更广,它表示功能块检测到错误就报警,有时候,我们通信正常,当我们读取的数据有问题,或是参数设置不正确时,也会报错,而我在程序中的错误仅仅是通信不上的错误,也就是,这个Error表示的范围更广泛,它更适合我们调试的时候监控。而我在程序中取的通信错误,是在上位机做监控用的。
3、READ_VAR
读取和写入的功能块完全一样,大家可以尝试自己分析一下。
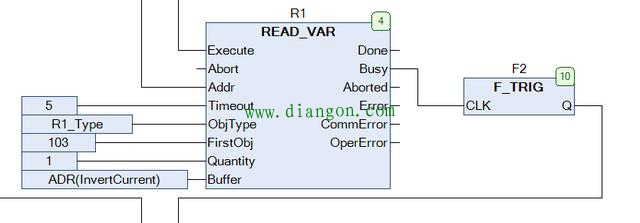
图三 READ_VAR功能块
4、数据的处理
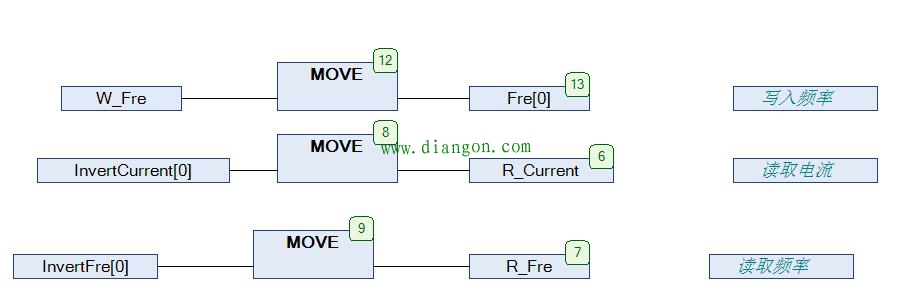
图四 数据的处理
这段是程序中和我们直接相关的,写入的频率,读取的频率和电流都是用MOVE指令处理,放到指定的变量中,方便我们使用,毕竟通信的终目的就是交互数据。
这就是施耐德PLC,MODBUS/RTU通信程序的三个功能块,其实本文还有一个目的,那就是我在前面文章指出,初学PLC有一个很大的误区,就是喜欢对着视频或是书本一条条学指令,其实这是错误的,正确的方式是在程序中学习指令,试想,如果你不知道MODBUS通信,没有这个通信例子,干巴巴的学这三个功能块,是很枯燥的,是毫无意义的,你也许心里会有一万匹***奔腾而过,这都是些什么玩意,当你根据这个实例,当你面对一个变频器要用通信控制的时候,再去学习这三个指令,是不是很轻松呢?至少,心里有了目的。
设置通讯参数(主要是波特率,校验,地址),并确保PLC和变频器侧参数一致,读取或写入变量的地址,个数以及数据类型(日系PLC不需要这一步,因为它不定义变量),是使用MODBUS基本套路。当你使用不同的PLC时,你的任务就是在软件中找到实现这些功能的地方,就可以完成通信。还有一点注意,不同的厂家,MODBUS接口是不一样的,常见的有DB9 RJ45,还有简单的螺钉接线。

图五DB9

图六RJ45
如 图五 图六 所示,是常用的MODBUS接线端子,使用时,务必仔细阅读手册,确定 正 负 端子。
在大量使用功能块,功能块之间联系比较紧密的场合,使用CFC语言时佳选择,比如串口通信,运动控制,高速计数等等。而这些场合用梯形图,那酸爽,用过日系PLC 的朋友应该很清楚,写了几个屏幕的程序,还没有进入主题。当然,也可以用ST语言来写,那样**简直就是没法形容了,对于后期维护很不方便,因为这么多变量,ST语言的可读性会很差,对保护自己的知识产权,到是很不多。因为,要想看懂ST写的这种程序,确实很费劲。