6ES7526-1BH00-0AB0安装调试
0 引 言
可编程逻辑器件PLD(Programmable Logic De-vice)是一种数字电路,它可以由用户来进行编程和进行配置,利用它可以解决不同的逻辑设计问题。PLD由基本逻辑门电路、触发器以及内部连接电路构成,利用软件和硬件(编程器)可以对其进行编程,从而实现特定的逻辑功能。可编程逻辑器件自20世纪70年代初期以来经历了从PROM,PLA,PAL,GAL到CPLD和FPGA的发展过程,在结构、工艺、集成度、功能、速度和灵活性方面都有很大的改进和**。
随着数字集成电路的不断更新和换代,特别是可编程逻辑器件的出现,使得传统的数字系统设计方法发生了根本的改变。可编程逻辑器件的灵活性使得硬件系统设计师在实验室里用一台计算机、一套相应的EDA软件和可编程逻辑芯片就可以完成数字系统设计与生产。
1 Max+plusⅡ简介
Max+plusⅡ是一种与结构无关的全集成化设计环境,使设计者能对Altera的各种CPLD系列方便地进行设计输入、快速处理和器件编程。Max+plusⅡ开发系统具有强大的处理能力和高度的灵活性,其主要优点:与结构无关、多平台、丰富的设计库、开放的界面、全集成化、支持多种硬件描述语言(HDL)等。
数字系统的设计采用自顶向下、由粗到细,逐步分解的设计方法,顶层电路是指系统的整体要求,下层是具体的逻辑电路的实现。自顶向下的设计方法将一个复杂的系统逐渐分解成若干功能模块,从而进行设计描述,并且应用EDA软件平台自动完成各功能模块的逻辑综合与优化,门级电路的布局,再下载到硬件中实现设计,具体设计过程如下。
1.1 设计输入
Max+plusⅡ支持多种设计输入方式,如原理图输入、波形输入、文本输入和它们的混合输入。
1.2 设计处理
设计输入完后,用Max+plusⅡ的编译器编译、查错、修改直到设计输入正确,将对输入文件进行逻辑简化、优化,后生成一个编程文件,这是设计的核心环节。
1.3 设计检查
Max+plusⅡ为设计者提供完善的检查方法设计仿真和定时分析,其目的是检验电路的逻辑功能是否正确,测试目标器件在差情况下的时延,这一查错过程对于检验组合逻辑电路的竞争冒险和时序逻辑电路的时序、时延等至关重要。
1.4 器件编程
当电路设计、校验之后,Max+plusⅡ的Program-mer将编译器所生成的编译文件下载到具体的CPLD器件中,即实现目标器件的物理编程。
2 以计数器为例介绍具体的设计方法
计数器是非常常用的时序逻辑电路。计数器类型有多种,实现计数器的方法也有很多。可以买到大部分类型的中规模集成的计数器直接使用,也可以用触发器搭建符合要求的计数器。采用以上方法实现的计数器灵活性不够,不能随时进行修改,通用性差。这里介绍基于可编程逻辑器件的实现方法。
2.1 设计输入
采用原理-图输入的思维方式比较适合一直采用传统设计方法人的使用。原理图输入如图1所示。

采用硬件描述语言输入的方法对于没有传统设计方法经验的人更容易入门,修改起来也更方便。给出了一个可逆计数器的实现实例,程序的核心部分如下:

2.2 设计处理
原理图或程序完成之后,选择好器件并进行引脚定义,编译优化得到编程文件的界面如图2所示。
伺服液压运动控制:选择PLC还是运动控制器?
一些闭环运动控制的应用很显然需要运动控制器,一些人也可以通过使用PLC来实现闭环控制。当然,选择何种控制方式常常难以定论。
当你可以使用PLC控制的时候,为什么还需要花钱去购买一个专用的电液运动控制器呢?很简单。一般来说,考虑的因素包括使用数量,实现难度,可用时间,生产效率,精度要求以及经济性等。做出何种决定往往是很模糊的。根据以往的经验,我知道哪种类型的应用可以用PLC,哪种不适用。
对于大多数的控制系统设计者来说,成本是首当其冲的想法。简单的办法就是购买带有模拟量输入和输出的PLC用于各种轴的控制,还可以带有一些数字I/O,接着就可以编程了。通常都是从简单的比例控制开始,甚至PID控制块都不需要。这就是目前市面上大多数的液压伺服控制的做法,人们接受液压的培训很多,但也于此。
模拟量的反馈必须转化缩放为位置单位。我很奇怪的是,在一些PLC论坛里,很多的人在咨询如何把一个模拟量转化为毫米或英寸。如果编程的工程师在问,很显然他啥也编不了。对输入值比例缩放之后,很简单的做法就是,从指令位置减去实际位置,差值乘以比例增益,该值作为模拟量的输出至阀。就是这么简单!
伺服液压运动控制:选择PLC还是运动控制器?
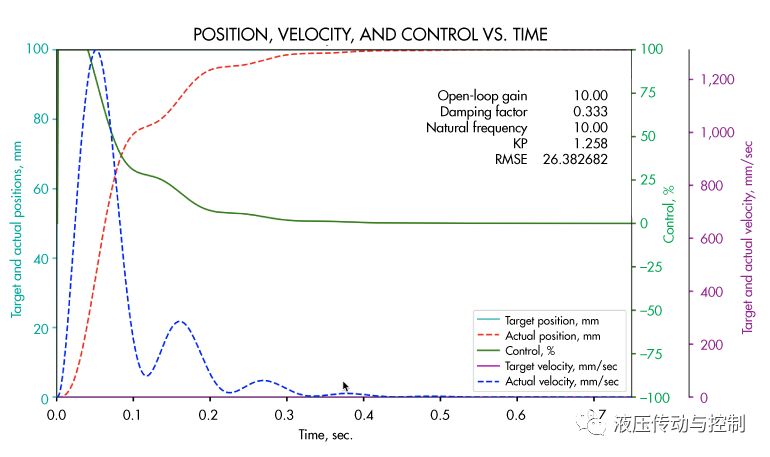
1. 该仿真显示了当指令位置突然改变100mm时将会发生什么。控制输出在饱和,执行器突然加速。实际位置则慢慢的接近100mm的目标值。
模拟量控制的PLC设置
PLC控制的一个挑战发生在液压缸的指令和实际位置相差很大的情况,因为此时输出至阀的信号可能很大。结果就是液压缸全速运动至指令位置。在指令位置的时候会发生什么就取决于增益和负载大小了。有时候液压缸会平滑减速至指令位置,如果负载很大,也会产生超调,并带有衰减振荡。
关于此问题可以有多种解决方案。一个简单的办法就是限制输出值为低于的某个值。更好的解决办法就是准备一个目标发生器,从而可以朝着指令位置的的方向增加目标值。接着,不是比较指令位置与实际位置,而是比较实际位置与下一个目标位置。目标位置在当前位置开始启动,按照期望的速率增加并达到指令位置。对于长行程运动来说,则可以避免初始运动时的振动和冲击。这种解决方案相对来说也比较容易实施。
举个例子,如果两个液压缸跟随同样的目标位置,其位置同步是相对容易的。如果两个缸所受的负载完全一致,目标值的跟踪误差也应该一致,它们的实际位置也会非常接近。那么,对于只有比例控制的系统来说,跟踪误差是什么呢?
跟踪误差公式:
Ef = v/(K ? Kp)
此处:
Ef - 跟踪误差,mm,
v - 速度, mm/s,
K - 开环增益, (mm/s)/%
Kp - 比例增益, %/mm.
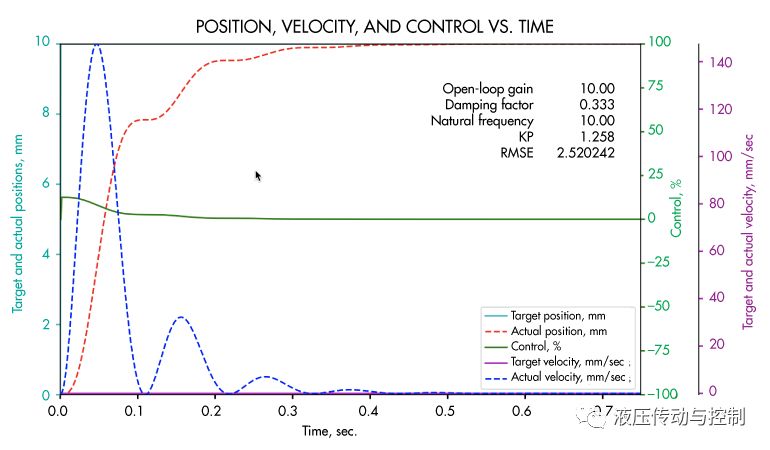
2. 该曲线与图1说设想的方案一样,只是指令位置只改变10mm。注意的是它们用了同样的时间。这是因为运动控制的时间常数是5倍。5倍时间常数即0.358s。意味着1mm的运动要花0.358s才能达到目标值的1%。
单位很重要,并需要保持一致。百分比代表控制输出的百分数。控制输出的百分数可以是 ±10 V, ±20 mA的百分数,或者其它的,只要单位一致就可以。当使用PLC的时候,跟踪误差通常情况并没有那么重要,液压缸只需要能够大体的接近指令位置即可。上面的等式适用于对跟踪误差有限定的应用。用户可以决定动作速度,以满足应用要求。
计算开环增益需要用到VCCM公式,其计算了在控制输出时大的稳态速度。该公式在相关论坛已经讨论过很多次。(延伸阅读:VCCM-如果**计算不再是Q=A*V?)
比例增益的计算稍微复杂一些。你可以尝试使用试错法,确定一个可以看起来可以工作的数值。如果增益太低,液压缸响应会很迟缓。如果增益太高,执行器会有振荡的可能。优的增益是可以计算的:
Kp = 2 ? ζ? ωn ? (9 ? 8 ? ζ2)/(27 ? K)
此处:
Kp - 比例增益,输入偏差信号变化的相对值mm与输出信号变化的相对值之比的百分数表示,
ζ - 阻尼系数(未知时假定为0.3333),
ω - 自然频率,弧度/s
K - 开环增益
近年来,随着农村经济的发展,生活用电及农业生产用电都大幅度**,特别是农电体制的改革,城乡同网同价的实现,用电量更是急速增加。也投入大量资金进行农网改造,但都跟不上用电需求步伐,加上一直以来农村电网并没有较完善的规划,高低压线路供电半径过大,配变布点不合理的现象仍大量存在,造成电压质量差,线路损耗大。农电体制改革前,没有抄表到户,低压线路损耗由用户负担,电压质量的测定也只到配变的低压侧,在这两方面未有较实际的数据统计。但抄表到户后,高低压线路的损耗均由供电部门承担,上级对线损率的要求越来越严格,用户对电压质量的要求也**了,如何解决这两个问题成为当时较迫切的任务。综合考虑时间、资金等方面的因素及配网的实际情况,我们尝试采用不同的无功补偿方式以**功率因数入手,选用一些上述问题相对严重的线路作为试点开展本项工作。
无功补偿点的合理选择以及补偿容量的确定,能够有效地维持系统的电压水平,**系统的电压稳定性,避免大量无功功率的远距离传输,从而降低有功网损,减少发电费用。
10kV及以下配电网采用的无功补偿方式有:10kV线路补偿、变压器低压侧集中补偿、公用低压线路分散补偿几种方式。以往通常采用的方法是在变压器低压侧进行补偿,既可降低线路损耗,也能降低配电变压器损耗,电压质量也有较大的改善。但随着运行条件的变化,这种单一补偿方式不能解决出现的种种问题。笔者针对新会配网的一些实际情况,通过采用多种补偿方式结合的办法,取得不错的效果。
1 变压器低压侧集中补偿方式
目前较普遍采用的是在配电变压器380V侧进行集中补偿,通常采用微机控制的低压并联电容器柜,容量在几十至几百千乏不等,根据用户负荷水平的波动投入相应数量的电容器进行跟踪补偿。主要目的是**配变负荷的功率因数,实现无功的就地平衡,对配电网和配电变的降损有一定作用,也有助于保证配变输出的电压水平。自动补偿装置控制器是根据功率因数来进行电容器的自动投切的。
自1999年农网改造以来,无论是公用台区还是专用台区,对于100kVA及以上的变压器,我们基本上都按其容量的20%~40%配置了低压集中式动态无功补偿。这种补偿方式对于专用户及主要负荷距配变不远的公用台区效果较好,既能改善电压质量,又能降损,维护工作相对简单。但对于低压线路长、负荷分散的台区,配变输入电压低的地方,单一采用变压器低压侧集中补偿的方式效果就不太理想,需结合其他方式进行无功补偿。
2 低压线路分散补偿方式
随着农村经济的发展,农业生产用电量越来越大,特别是部分水网地带的养殖业,其特点是用电量大、地点分散、负荷功率因数低(用电设备主要是小容量三相电机,且一般养殖用户不会安装补偿装置),波动大,一直以来这部分的电压质量及损耗都是存在很大的问题。彻底的解决办法就是新架设10kV线路、新增台区或调整布点和改造低压线路。但由于长期以来农村配电网缺乏长期规划,要进行完善的改造所需的资金量是非常巨大的,所需时间也是很长的,在短期内难以实现。经过分析研究,决定采用在这类低压线路上分散安装电容补偿器的方法来解决。
2003年同网同价后,大鳌镇养殖用电急剧增长,造成了许多变压器、配电屏、低压线经常出现超载,线路后段电压严重偏低。表1为其中一个台区的测量数据:主要负荷集中在两条出线,每条出线长700多米,共30多户分散接在低压出线上,2003年上半年线损率为26%。
表1 台区测量数据统计:
由表1数据看出变压器及低压线路超载,且电压严重偏低,如果要彻底解决需新架设10kV线路并另立一个新台区,投资将超过40万元,耗时少50日。而我们采用低压线路分散补偿的方法,分别在每条出线距配变1/3及2/3处各安装一台45kVar及30kVar的电容补偿箱,因养殖用电极不平衡,在夜间达到高峰,白天一半负荷都不到,故所有补偿箱均安装自动控制装置,费用约3万元,内就安装完毕。投运后测量数据如表2(峰期)所示。
表2 新台区投运后测量数据:
由表2数据看出,出线的电流得到较大幅度的降低,尤其是线路末端电压得到很大的**,对线路损耗会起到相当大的作用。经过3个月的用电数据统计,线损率降到15.7%。
对类似这些低压用电,采用分散补偿方式有较大的优点,投入少,见效快,电房内的集中补偿容量还可相对减少。但由于运行的环境比较恶劣,相关设备的质量要求高,日常维护工作量大,必须有严谨的管理制度才能保证可靠运行。
3 10kV线路分散补偿方式
这种补偿方式适用于功率因数较低且负荷较重的长距离配电线路。以110kV睦洲站10kV黄布线为例,干线长13km,较大的负荷主要集中在线路后段,且主要为农业用电,以排灌、增氧(不容量电机)为主,2004年高运行电流为478A,线路末端高压侧电压只有8900V(首端为10200V)。在大多数配变的低压侧及低压线路都安装一定数量的补偿电容,但电压质量仍然相当差,用电户意见很大。就其所处的地理位置及当地的经济发展,不可能投入大额的资金进行电网建设。经分析,采用10kV线路分散补偿的方式解决。
根据10kV黄布线的负荷分布情况,在线路(共142基杆)的75#杆、101#杆上分别安装容量为375kVar和450kVar的无功补偿。采用的是TBBZ系列柱上式自动投切高压并联电容器装置,可根据线路需要,经预先设定,实现并联电容器的自动投切(按时间、电压或功率因数),具有短路、过流、过电压、欠电压和防止电容器带电荷合闸竺保护功能。投运后,经实际测量,线路末端电压升高到9520V。在使用过程中,开始按功率因数设定投切值,但由于需在干线上装设开口式采样电流互感器,对防雷要求较高,存在较大的难度。针对本项工作的实际需要,改用按电压设定投切值,取消安装电流互感器,同样收到预期的效果,10kV电压的**,对减少低压配网的损耗是不言而喻的。
对于功率因数低的长距离配电线路,采用10kV线路分散补偿方式对**电压质量,减少损耗能起到立竿见影的作用。同样,因运行环境等因素,设备质量、管理等要求较高的水平 。
4 结束语
对无功功率进行补偿的效果是有目共睹的,在选择补偿方式的过程中,应该在技术经济上综合考虑,根据具体情况进行分析,来决定是采用高压补偿、低压集中补偿还是低压分散补偿,还是三者综合采用,从而达到**功率因数、降低配网损耗、**电压质量,使电气设备经济运行的目的。还有,只有既重视无功补偿的安装又重视投运后的运行维护,才能真正实现无功功率的合理分布,从而达到节能降损之功效,使供用电双方共同取得佳的经济效益。