西门子模块6ES7321-1CH20-0AA0参数详细
可编程控制器的主要由CPU模块、输入模块、输出模块和编程器组成(见图1)
图1 plc控制系统示意图 |

1、中央处理单元(CPU)
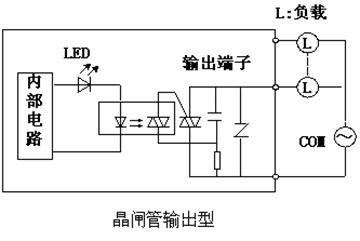
4、可编程控制器输出接口电路
第二:晶闸管输出型: 为无触点输出方式,用于接通或断开开关频率较高的交流电源负载。
第三:晶体管输出型:为无触点输出方式,用于接通或断开开关频率较高的直流电源负载。
5、模拟量接口电路 |

一、 凸轮控制器的结构
凸轮控制器从外部看,由机械、电气、防护等三部分结构组成。其中手柄、转轴、凸轮、杠杆、弹簧、定位棘轮为机械结构。触头、接线柱和联板等为电气结构。而上下盖板、外罩及灭弧罩等为防护结构。

二、 凸轮控制器控制电路
1 .电路特点
( 1 )可逆对称电路。
( 2 )为减少转子电阻段数及控制转子电阻的触点数,采用凸轮控制器控制绕线型电动机时,转子串接不对称电阻。
( 3 )用于控制提升机构电动机时,提升与下放重物,电动机处于不同的工作状态。
2 .控制线路分析
( 1 )主电路分析
图 2 凸轮控制器原理图
凸轮控制器操作手柄使电动机定子和转子电路处在左边或右边对应各档控制位置。左右两边转子回路接线一样。当操作手柄处于档时,各对触点都不接通,转子电路电阻全部接入,电动机转速。而处在第五档时,五对触点全部接通,转子电路电阻全部短接,电动机转速高。
( 2 )控制电路分析 凸轮控制器的三对触点串接在接触器 KM 的控制回路中,当操作手柄处于零位时,触点 1-2 、 3-4 、 4-5 接通,此时若按下 SB 则接触器得电吸合并自锁,电源接通,电动机的运行状态由凸轮控制器控制。
( 3 )保护联锁环节分析 控制器 3 对常闭触点用来实现零位保护、并配合两个运动方向的行程开关 SQ1 、 SQ2 实现限位保护
西门子电源6ES7307-1BA01-0AA0
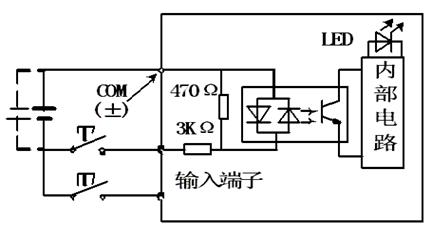
各类PLC的输入电路大致相同,通常有三种类型。一种是直流12~24V输入,另一类是交流100~120V、200~240V输入,第三类是交直流输入。外界输入器件可以是无源触点或是有源的传感器输入。这些外部器件都要通过PLC端子与PLC连接,都要形成闭合有源回路,必须提供电源。
1 无源开关的接线
FX2N系列PLC只有直流输入,且在PLC内部,将输入端与内部24V电源正极相连、COM端与负极连接,参见图1所示。这样,其无源的开关类输入,不用单独提供电源。这与其它类PLC有很大区别,在今后使用其它PLC时,要注意仔细阅读其说明书。

2 接近开关的接线
接近开关指本身需要电源驱动,输出有一定电压或电流的开关量传感器。开关量传感器根据其原理分有很多种,可用于不同场合的检测,但根据其信号线可以分成三大类:两线式、三线式、四线式。其中四线式有可能是提供一个动合触点和一个动断触点,实际中只用其中之一;或者是第四根线为传感器校验线,校验线不会与PLC输入端连接的。无论那种情况都可以参照三线式接线。图2为PLC与传感器连接的示意图。

两线式为一信号线与电源线。三线式分别为电源正、负极和信号线。不同作用的导线用不同颜色表示,这种颜色的定义有不同的定义方法,使用时参见相关说明书。图2(b)中所示为一种常见的颜色定义。信号线为黑色时为动合式;动断式用白色导线。
图示传感器为NPN型,是常用的形式。对于PNP型传感器与PLC连接,不能照搬这种连接,要参考相应的资料。
3 旋转编码器的接线
旋转编码器可以提供高速脉冲信号,在数控机床及工业控制中经常用到。不同型号的编码器输出的频率、相数也不一样。有的编码器输出A、B、C三相脉冲,有的只有两相脉冲,有的只有一相脉冲(如A相),频率有100 Hz、200Hz、1k Hz、 2k Hz 等。当频率比较低时,PLC可以响应;频率高时,PLC就不能响应,此时,编码器的输出信号要接到特殊功能模块上,FX2N-11C如采用FX2N-11HC高速计数模块。
图3为FX2N型PLC与OMRON的E6A2-C系列旋转编码器的接口示意图。
