西门子6ES331-7KF02-0AB0
西门子PLC串口通讯方法
1、RS485 串口通信
第三方设备大部分支持,西门子S7 PLC 可以通过选择自由口通信模式控制串口通信。*简单的情况只用发送指令 (XMT )向打印机或者变频器等第三方设备发送信息。不管任何情况,都必须通过 S7 PLC 编写程序实现。当选择了自由口模式,用户可以通过发送指令(XMT )、接收指(RCV)、发送中断、接收中断来控制通信口的操作。
2、PPI 通信
PPI 协议是S7-200CPU *基本的通信方式,通过原来自身的端口 (PORT0 或 PORT1)就可以实现通信,是 S7-200 CPU 默认的通信方式。PPI 是一种主-从协议通信,主-从站在一个令牌环网中。在CPU内用户网络读写指令即可,也就是说网络读写指令是运行在PPI 协议上的。PPI 只在主站侧编写程序就可以了,从站的网络读写指令没有什么意义。
3、MPI 通信
MPI通信是一种比简单的通信方式,MPI网络通信的速率是19.2Kbit/s~12Mbit/s,MPI网络*多支持连接32个节点,*大通信距离为50M。通信距离远,还可以通过中继器扩展通信距离,但中继器也占用节点。MPI网络节点通常可以挂S7-200、人机介面、编程设备、智能型ET200S及RS485 中继器等网络元器件。西门子 PLC 与 PLC 之间的 MPI 通信一般有3种通信方式:
1) 全局数据包通信方式
2) 无组态连接通信方式
3) 组态连接通信方式
4、PROFIBUS-DP 通信
PROFIBUS-DP现场总线是一种开放式现场总线系统,符合欧洲标准和。PROFIBUS-DP 通信的结构非常精简,传输速度很高且稳定,非常适合PLC 与现场分散的 I/O 设备之间的通信。
5、以太网通信
以太网的核心思想是使用共享的公共传输通道,这个思想早在1968 年来源于厦威尔大学,1972 年,Metcalfe 和 David Boggs (两个都是**网络专家)设置了一套网络,这套网络把不同的ALTO计算机连接在一起,还连接了EARS 激光打印机。这就是世界上**个个人计算机局域网,这个网络在1973 年5月22日运行。Metcalfe 在运行这天写了一段备忘录,备忘录的意思是把该网络改名为以太网(Ethernet),其灵感来自于“电磁辐射是可以通过发光的以太来传播"这一想法。1979 年,DEC、Intel 和 Xerox 共同将网络标准化。1984年,出现了细电缆以太网产品,后来陆续出现了粗电缆、双绞线、CATV同轴电缆、光缆及多种媒体的混合以太网产品。以太网是目前世界上流行的拓朴标准之一,具有传播速率高、网络资源丰富、系统功能强、安装简单和使用维护方便等很多优点
西门子6ES7312-5BF04-0AB0参数详细
问:在V20变频器中,使用MOP(Motorized Potentiometer,电动电位计)作为设定值源,DI2用作频率增加功能,DI3用作频率减少功能,两个数字量输入均为不带锁按键开关控制,即脉冲控制。控制接线图如图1所示。
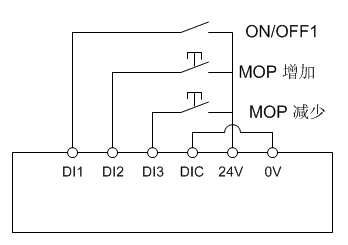
图1
如何设置参数实现一次按下按键开关时频率增加或减少5Hz?
答:在V20变频器的MOP中,短脉冲可以使频率设定值一次增加或减少0.1Hz。如图2所示。

图2
如果需要增加或减少得更多,需要用长脉冲来触发。按下开关后立即松开,可以形成一个短脉冲。利用自由功能块的定时器,采用定时器模式三——脉冲发生器,可以将短脉冲变成长脉冲。将定时器输出连接到P1035或P1036,并修改MOP斜坡上升、下降的时间,即可得到需要增加或减少的频率。如图3所示。
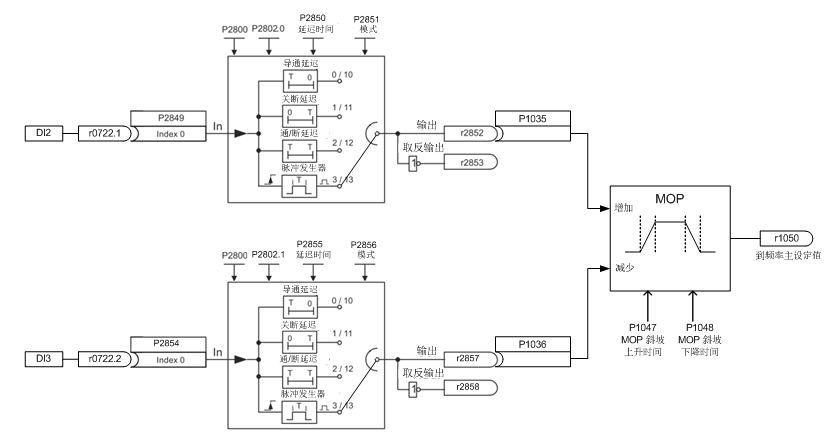
图3
参数设置如表1所示。
表1
| P0702=99 | 使能DI2的BICO功能 |
| P0703=99 | 使能DI3的BICO功能 |
| P2800=1 | 使能自由功能块 |
| P2802[0]=1 | 使能定时器1 |
| P2802[1]=1 | 使能定时器2 |
| P2849=722.1 | 定时器1输入为DI2 |
| P2850=1s | 定时器1脉冲时间为1s |
| P2851=3 | 定时器1功能为脉冲发生器 |
| P2854=722.2 | 定时器2输入为DI3 |
| P2855=1s | 定时器2脉冲时间为1s |
| P2856=3 | 定时器2功能为脉冲发生器 |
| P1035=2852 | MOP增速信号为定时器1输出脉冲 |
| P1036=2857 | MOP减速信号为定时器2输出脉冲 |
| P1047=1.45s | MOP斜坡上升时间为1.45s |
| P1048=1.47s | MOP斜坡下降时间为1.47s |
按照上述参数设置好后,MOP运行时序图如图4所示。

图4
注意:
增加P2850/P2855脉冲时间可以增大每次按下按键增加/减少的频率,在脉冲时间结束之前按下按键无效。
减小P1047/P1048斜坡时间可以增大每次按下键增加/减少的频率
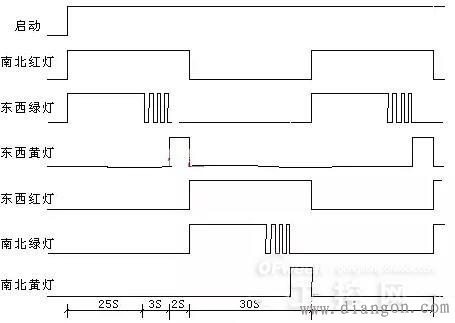
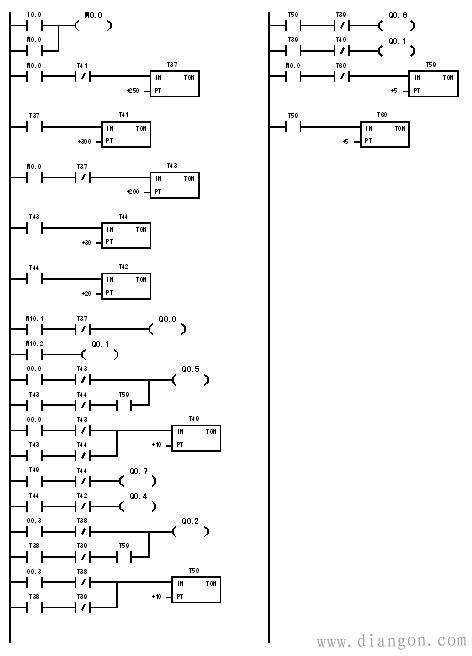
| 交通灯的控制要求如下:
控制开关 信号灯受启动及停止按钮的控制,当按动启动按钮时,信号灯系统开始工作,并周而复始地循环工作,当按动停止按钮时,系统将停止在初始壮态,即南北红灯亮,禁止通行;东西绿灯亮,允许通行。 控制要求 1、北红灯亮维持30秒,在南北红灯亮的东西绿灯也亮,并维持25秒,到25秒时,东西方向绿灯闪,闪亮3秒后,绿灯灭。在东西绿灯熄灭的东西黄灯亮,并维持2秒,到2秒时,东西黄灯灭,东西红灯亮。南北红灯熄灭,南北绿灯亮。 2、西红灯亮维持30秒。南北绿灯亮维持25秒,闪亮3秒,再熄灭。南北方向黄灯亮,并维持2秒后熄灭,这时南北红灯亮,东西绿灯亮。 接下去周而复始,直到停止按钮被按下为止。 信号灯动作系统可用图1状态图表示。
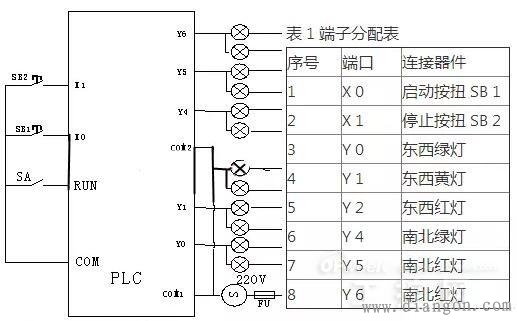
图1交通指挥信号灯状态图 硬件及接线 根据上述要求可见,系统所需红、绿、黄各4只信号灯,本案由两个信号灯箱实现;系统需要启动和停止两个按钮,由按钮箱实现。 可编程控制器的输入/输出端子分配及硬件连接分别由表1及图2所示。其中SA开关代表可编程控制器自身的运行开关。
图2plc输入/输出接线图 交通信号灯的软件设计 在本文中,我们采用步进梯形指令单流程编程实现,其状态转移图如图3所示。由图可知,我们把东西和南北方向信号灯的动作视为一个顺序动作,每一个时序有两个输出,一个输出控制东西方向的信号灯,另一个输出控制南北方向的信号灯。 状态转移图对应的步进梯形图如图4所示,现简单分析一下工作原理。当启动按钮SB1按下时,X0接通,S0置1,系统进入S0状态,驱动Y6、Y0,使南北红灯及东西绿灯亮,Y0接通,状态转移条件满足,系统将转移到S20状态,在S20状态下,Y6、Y0仍被驱动,即南北方向的红灯及东西方向的绿灯继续亮,驱动定时器T0,定时器的设定时间为25秒,25秒后,状态转移到S21,在S21状态下,Y6继续保持,但Y0受控于M1,而M1是由两个定时器T6和T7控制,T6、T7组成一个1秒的震荡器,即东西方向的绿灯闪亮。在本状态下,也驱动定时器T1,定时时间为3秒,3秒时间到,状态转移到S22,在S22状态下,Y6仍然被驱动,南北方向红灯继续亮,驱动T2、Y1,东西方向的绿灯灭,Y1口驱动的是东西方向的黄灯,故东西方向的黄灯亮,绿灯停。T2的定时时间为2秒,2秒时间到,状态转移到S23,在S23状态下,驱动Y2、Y4及T3,东西方向的红蛋亮,南北方向的绿灯亮,T3的定时时间为25秒,25秒时间到,状态转移到S24。在S24状态下,驱动Y2、T4,东西方向的红灯继续亮,而南北方向的绿灯驱动口Y4受控于M1,M1是震荡周期为1秒的震荡器,故南北方向的绿灯闪亮。T4的定时时间是3秒,3秒后,状态转移到S25。在S25状态下,驱动Y2、Y5及T5,即东西方向的红灯、南北的黄灯亮,T5定时器的定时时间为2秒,2秒时间到,定时器的定时时间到,T5的触点接通,状态又重新转移到S0。即南北方向的红灯、东西方向的绿灯亮,系统将重复上述的动作顺序,周而复始的继续工作。当停止按钮SB2被按下时,软继电器M0接通,其常闭触点M0断开,系统执行一周后,将停留在S0状态,及保持南北方向的红灯、东西方向的绿灯亮。 plc控制交通灯梯形图 一、控制系统实现目标 用PLC构成交通灯控制系统
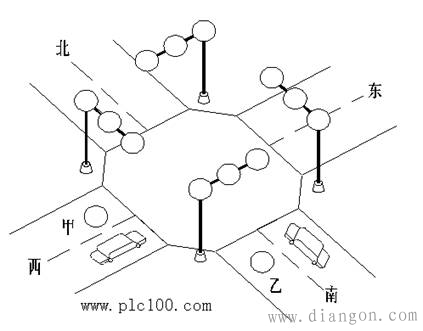
图1 交通灯控制示意图
二、控制要求及IO分配 1.控制要求 起动后,南北红灯亮并维持25s。在南北红灯亮的东西绿灯也亮,1s后,东西车灯即甲亮。到20s时,东西绿灯闪亮,3s后熄灭,在东西绿灯熄灭后东西黄灯亮,甲灭。黄灯亮2s后灭东西红灯亮。南北红灯灭,南北绿灯亮。1s后,南北车灯即乙亮。南北绿灯亮了25s后闪亮,3s后熄灭,乙灭,黄灯亮2s后熄灭,南北红灯亮,东西绿灯亮,循环。 2.I/O分配
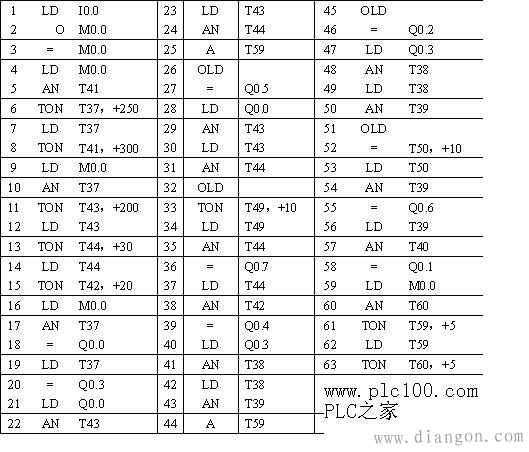
三、交通灯控制语句表
四、交通灯控制梯形图 |