西门子6ES7323-1BL00-0AA0性能参数
一般地讲,对模拟量控制系统的要求都是看在某种典型输入信号下,其被控量变化的过程。例如,自动调节系统,就是看扰动作用引起被控量变化的过程;随动系统就是看被控量,如何克服扰动影响,跟随给定量的变化而变化的过程等。对每类系统被控量变化过程的共同要求是稳定性、快速性和准确性。即:稳、准、快。
(1)稳定性
稳定性一般指系统的被控量一旦偏离期望值,则应随时间的增长逐渐减小或趋于零。对于稳定的自动调节系统,其被控量因扰动而偏离期望值后,经过一个过渡时间,应恢复到原来的期望值;对于稳定的随动系统,被控量应能跟踪给定量的变化而变化。不稳定的控制系统,其被控量偏离期望值后,将随时间的增长而发散。
稳定性是保证控制系统正常工作的先决条件。稳定是所有控制系统要满足的要求。不稳定,被调节量变化不定,以至于产生振荡,那是不允许的。
(2)准确性
准确性是指当过渡过程结束后,被控量的稳态值与期望值的一致性。实际上,由于系统结构、外作用形式,摩擦、间隙等非线性因素的影响,以及受模拟量控制与数字量相互转换分辨率的限制,被控量的稳态值与期望值之间总会有误差,称为稳态误差。在实际上.完全没有这个误差是不可能的。
这个稳态误差小,则精度高。这个误差尽可能小,这也是对控制的基本要求。精度当然越高越好。但也要有个合适的“度”。一般来讲,合乎要求就可以了。
(3)快速性
除了稳定性、准确性,在多数情况下,还对过渡过程的形式和快慢有要求,一般称之为动态性能。快速性是指系统实际值偏离要求(设定)值时,系统能很快(过渡时间短)而又平稳地回到设定值。
用来控制模拟量主要有三个特点:一是有误差,二是断续的,三是有时延。艾特贸易网简单介绍这三个特点,并对物理量在时间上、取值上的特点加以说明。
1.误差
模拟量在时间上、取值上是连续的。
对模拟量按一定时间间隔取值,称为采样。采样后得到的值即为离散量。显然,离散量在时间上是离散的,即只在采样的瞬间代表当时的模拟量值,其他时刻的模拟量的值不代表。但取值上是连续的。
用数值来逼近离散量,即求与实际的离散量接近的数字量,称为量化。量化后的离散量称为数字量。数字量在时间与取值上都是离散的。
plc只能处理数字量,而要用它控制模拟量,必须先要对这些模拟量进行采样与量化。
正是要量化,量化后的值总是与模拟量的原值存在误差,但这个误差是可控的。办法靠选用合适的输入、输出模块的位数。如用8位输入模块,其量化的值只能是0到255(16进制ff)之间的整数。故其分辨率为256分之一。如果选的位数多,分辨率高精度也高。单位数多,模块也贵。高过16位时还要用双字指令处理,但这也将增加资源开销和处理时间。
误差可得到控制是一个重要的优点,只是这里也有一个合理的“度”,应在保证精度的要求下,力求减小位数。
2.断续
正是要采样,是断续的。只是在plc i/o刷新时,输入模块才把实际值读入plc;输出模块或输出点才把控制信号输给系统,并控制系统。只有在这时,才相当于它的采样开关合上,系统是闭合的。但这个闭合时间是很短暂的。而较长的时间是用在plc运行程序、对采集到的数据进行处理。而这期间系统闭环是断开的。可见,plc模拟量控制系统是典型的采样控制系统。
为了保证采样信号能较少失真地恢复为原来的连续信号,根据采样定理,采样频率一般应大于或等于系统频率的两倍。大频率是系统幅频特性上幅值为零时的频率。
3.时延
实际系统本身的惯性及动作传递也有个过程,有一定时延。用plc进行控制,采样、信息处理及控制输出也有个过程,更有时延。在实施一个新一轮的控制作用后,不能指望立即就会有所反应。不能因为一时不能得到所期望的反应,就一味地改变控制作用。那样,很可能使系统出现不稳定。再如,用pid控制,其运算间隔不应太短,如无特殊措施,其间隔起码要大于程序的扫描周期等。
以上三个特点,在确定控制算法、设计控制程序及选定控制参数时,必须要考虑。
良好的接地是安全可靠运行的重要条件。为了抑制干扰,plc一般好单独接地,与其他设备分别使用各自的接地装置,如图a所示;禁止使用如图b所示把plc与其他设备共用一个接地体的接地方式。

图plc的接地
为了防止电击和噪声引起的误动作,cpm2 plc的接地端子必须接地,且使接地点尽量靠近plc。接地电阻要小于100ω,接地线必须使用1.25 mm以上的电线。plc的cpu单元必须接地,若使用了i/o扩展单元等,则cpu单元应与它们具有共同的接地体,从任一单元的保护接地端到地的电阻都不能大于100ω。
cpm2的接地线总是使用压线端子或单股线(替代绞合线),不能将裸露的绞合线直接接到端子板上,松散的绞合线容易引起短路和火灾。
1、类故障点(也是故障多的地点)在、。
如生产线控制系统的日常维护中,备件消耗量大的为各类继电器或。主要原因除产品本身外,就是现场环境比较恶劣,接触器触点易打火或氧化,发热变形直至不能使用。减少此类故障应尽量选用高性能继电器,改善使用环境,减少更换的频率,以减少其对系统运行的影响。
2、第二类故障多发点在阀门或闸板这一类的设备上。
因为这类设备的关键执行部位,相对的位移一般较大,或者要经过电气转换等几个步骤才能完成阀门或闸板的位置转换,或者利用电动执行机构推拉阀门或闸板的位置转换,机械、电气、液压等各环节稍有不到位就会产生误差或故障。长期使用缺乏维护,机械、电气失灵是故障产生的主要原因,在系统运行时要加强对此类设备的巡检,发现问题及时处理。我厂对此类设备建立了严格的点检制度,经常检查阀门是否变形,执行机构是否灵活可用,控制器是否有效等,很好地保证了整个控制系统的有效性。
3、第三类故障点可能发生在开关、极限位置、安全保护和现场操作上的一些元件或设备上。
其原因可能是因为长期磨损,也可能是长期不用而锈蚀老化。对于这类设备故障的处理主要体现在定期维护,使设备时刻处于完好状态。对于限位开关尤其是重型设备上的限位开关除了定期检修外,还要在设计的过程中加入多重的保护措施。
4、第四类故障点可能发生在plc系统中的子设备。
这类设备如接线盒、线端子、螺栓螺母等处。这类故障产生的原因除了设备本身的制作工艺原因外还和安装工艺有关,如有人认为电线和螺钉连接是压的越紧越好,但在二次维修时很容易导致拆卸困难,大力拆卸时容易造成连接件及其附近部件的损害。长期的打火、锈蚀等也是造成故障的原因。根据工程经验,这类故障一般是很难发现和维修的。在设备的安装和维修中一定要按照安装要求的安装工艺进行,不留设备隐患。
5、第五类故障点是和仪表。
这类故障在控制系统中一般反映在信号的不正常。这类设备安装时信号线的屏蔽层应单端可靠接地,并尽量与动力电缆分开敷设,特别是高干扰的输出电缆。这类故障的发现及处理也和日常点巡检有关,发现问题应及时处理。
6、第六类故障主要是、地线和信号线的噪声(干扰)。
问题的解决或改善主要在于工程设计时的经验和日常维护中的观察分析。
plc是专门在现场使用的控制装置,在设计制造时已采取了很多措施,使它对工业环境比较适应,为了确保整个系统稳定可靠,还是应当尽量使plc有良好的工作环境条件, 并采取必要的抗干扰措施。
梯形图的编程方式是指根据功能表图设计出梯形图的方法。为了适应各厂家的在编程元件、指令功能和表示方法上的差异,下面主要介绍使用通用指令的编程方式、以转换为中心的编程方式、使用stl指令的编程方式和仿stl指令的编程方式。
为了便于分析,我们假设刚开始执行用户程序时,系统已处于初始步(用初始化脉冲m8002将初始步置位),代表其余各步的编程元件均为off,为转换的实现做好了准备。
1.使用通用指令的编程方式
编程时用辅助来代表步。某一步为活动步时,对应的辅助继电器为“1”状态,转换实现时,该转换的后续步变为活动步。由于转换条件大都是短信号,即它存在的时间比它激活的后续步为活动步的时间短,应使用有记忆(保持)功能的电路来控制代表步的辅助继电器。属于这类的电路有“起保停电路”和具有相同功能的使用set、rst指令的电路。
如图1a所示mi-1、mi和mi+l是功能表图中顺序相连的3步,xi是步mi之前的转换条件。
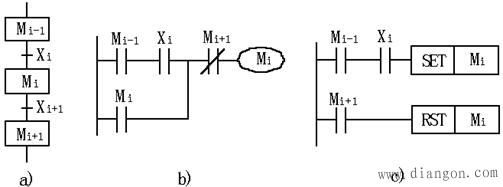
图1使用通用指令的编程方式示意图
编程的关键是找出它的起动条件和停止条件。根据转换实现的基本规则,转换实现的条件是它的前级步为活动步,并且满足相应的转换条件,步mi变为活动步的条件是mi-1为活动步,并且转换条件xi=1,在梯形图中则应将mi-1和xi的常开触点串联后作为控制mi的起动电路,如图1b所示。当mi和xi+1均为“l”状态时,步mi+1变为活动步,这时步mi应变为不活动步,可以将mi+1=1作为使mi变为“0”状态的条件,即将mi+1的常闭触点与mi的线圈串联。也可用set、rst指令来代替“起保停电路”,如图1c所示。
这种编程方式仅仅使用与触点和线圈有关的指令,任何一种plc的指令系统都有这一类指令,称为使用通用指令的编程方式,可以适用于任意型号的plc。
如图2所示是根据液压滑台系统的功能表图使用通用指令编写的梯形图。开始运行时应将m300置为“1”状态,否则系统无法工作,故将m8002的常开触点作为m300置为“1”条件。m300的前级步为m303,后续步为m301。由于步是根据输出状态的变化来划分的,梯形图中输出部分的编程极为简单,可以分为两种情况来处理:
1)某一输出继电器仅在某一步中为“1”状态,如y1和y2就属于这种情况,可以将y1线圈与m303线圈并联,y2线圈与m302线圈并联。看起来用这些输出继电器来代表该步(如用y1代替m303),可以节省一些编程元件,但plc的辅助继电器数量是充足、够用的,且多用编程元件并不增加硬件费用,一般情况下全部用辅助继电器来代表各步,具有概念清楚、编程规范、梯形图易于阅读和容易查错的优点。
2)某一输出继电器在几步中都为“1”状态,应将代表各有关步的辅助继电器的常开触点并联后,驱动该输出继电器的线圈。如y0在快进、工进步均为“1”状态,将m301和m302的常开触点并联后控制y0的线圈。注意,为了避免出现双线圈现象,不能将y0线圈分别与m301和m302的线圈并联。

图2使用通用指令编程的液压滑台系统梯形图。
2.以转换为中心的编程方式
如图3所示为以转换为中心的编程方式设计的梯形图与功能表图的对应关系。图中要实现xi对应的转换必须满足两个条件:前级步为活动步(mi-1=1)和转换条件满足(xi=1),用mi-1和xi的常开触点串联组成的电路来表示上述条件。两个条件满足时,该电路接通时,此时应完成两个操作:将后续步变为活动步(用set mi指令将mi置位)和将前级步变为不活动步(用rst mi-1指令将mi-1复位)。这种编程方式与转换实现的基本规则之间有着严格的对应关系,用它编制复杂的功能表图的梯形图时,更能显示出它的优越性。

图3以转换为中心的编程方式
如图4所示为某信号灯控制系统的时序图、功能表图和梯形图。初始步时仅红灯亮,按下起动按钮x0,4s后红灯灭、绿灯亮,6s后绿灯和黄灯亮,再过5s后绿灯和黄灯灭、红灯亮。按时间的先后顺序,将一个工作循环划分为4步,并用定时器t0~t3来为3段时间定时。开始执行用户程序时,用m8002的常开触点将初始步m300置位。按下起动按钮x0后,梯形图第2行中m300和x0的常开触点均接通,转换条件x0的后续步对应的m301被置位,前级步对应的辅助继电器m300被复位。m301变为“1”状态后,控制y0(红灯)仍然为“l”状态,定时器t0的线圈通电,4s后t0的常开触点接通,系统将由第2步转换到第3步,依此类推。

图4某信号灯控制系统
a)时序图b)功能表图c)以转换为中心编程的梯形图
使用这种编程方式时,不能将输出继电器的线圈与set、rst指令并联,这是因为图4中前级步和转换条件对应的串联电路接通的时间是相当短的,转换条件满足后前级步马上被复位,该串联电路被断开,而输出继电器线圈至少应该在某一步活动的全部时间内接通。
3.使用stl指令的编程方式
许多plc厂家都设计了专门用于编制顺序控制程序的指令和编程元件,如美国ge公司和gould公司的鼓形控制器、日本东芝公司的步进顺序指令、三菱公司的步进梯形指令等。
步进梯形指令(step ladder instruction)简称为stl指令。fx系列就有stl指令及ret复位指令。利用这两条指令,可以很方便地编制顺序控制梯形图程序。
fx2n系列plc的状态器s0~s9用于初始步,s10~s19用于返回原点,s20~s499为通用状态,s500~s899有断电保持功能,s900~s999用于报警。用它们编制顺序控制程序时,应与步进梯形指令一起使用。fx系列还有许多用于步进顺控编程的特殊辅助继电器以及使状态初始化的功能指令ist,使stl指令用于设计顺序控制程序更加方便。
使用stl指令的状态器的常开触点称为stl触点,它们在梯形图中的元件符号如图5所示。图中可以看出功能表图与梯形图之间的对应关系,stl触点驱动的电路块具有三个功能:对负载的驱动处理、指定转换条件和指定转换目标。

图5 stl指令与功能表图
除了后面要介绍的并行序列的合并对应的梯形图外,stl触点是与左侧母线相连的常开触点,当某一步为活动步时,对应的stl触点接通,该步的负载被驱动。当该步后面的转换条件满足时,转换实现,即后续步对应的状态器被set指令置位,后续步变为活动步,与前级步对应的状态器被系统程序自动复位,前级步对应的stl触点断开。
使用stl指令时应该注意以下一些问题:
1)与stl触点相连的触点应使用ld或ldi指令,即ld点移到stl触点的右侧,直到出现下一条stl指令或出现ret指令,ret指令使ld点返回左侧母线。各个stl触点驱动的电路一般放在一起,后一个电路结束时—定要使用ret指令。
2)stl触点可以直接驱动或通过别的触点驱动y、m、s、t等元件的线圈,stl触点也可以使y、m、s等元件置位或复位。
3)stl触点断开时,cpu不执行它驱动的电路块,即cpu只执行活动步对应的程序。在没有并行序列时,任何时候只有一个活动步,大大缩短了扫描周期。
4)由于cpu只执行活动步对应的电路块,使用stl指令时允许双线圈输出,即同一元件的几个线圈可以分别被不同的stl触点驱动。实际上在一个扫描周期内,同一元件的几条out指令中只有一条被执行。
5)stl指令只能用于状态寄存器,在没有并行序列时,一个状态寄存器的stl触点在梯形图中只能出现一次。
6)stl触点驱动的电路块中不能使用mc和mcr指令,可以使用cjp和ejp指令。当执行cjp指令跳人某一stl触点驱动的电路块时,不管该stl触点是否为“1”状态,均执行对应的ejp指令之后的电路。
7)与普通的辅助继电器一样,可以对状态寄存器使用ld、ldi、and、ani、or、ori、set、rst、out等指令,这时状态器触点的画法与普通触点的画法相同。
8)使状态器置位的指令如果不在stl触点驱动的电路块内,执行置位指令时系统程序不会自动将前级步对应的状态器复位。
如图6所示小车一个周期内的运动路线由4段组成,它们分别对应于s31~s34所代表的4步,s0代表初始步。

图6小车控制系统功能表图与梯形图
假设小车位于原点(左端),系统处于初始步,s0为“1”状态。按下起动按钮x4,系统由初始步s0转换到步s31。s31的stl触点接通,y0的线圈“通电”,小车右行,行至右端时,限位开关x3接通,使s32置位,s31被系统程序自动置为“0”状态,小车变为左行,小车将这样一步一步地顺序工作下去,后返回起始点,并停留在初始步。图6中的梯形图对应的指令表程序如表所示.。
表小车控制系统指令表
| ld set stl ld set stl | m8002 s0 s0 x4 s31 s31 | out ld set stl out ld | y0 x3 s32 s32 y1 x1 | set stl out ld set stl | s33 s33 y0 x2 s34 s34 | out ld set ret | y1 x0 s0 |
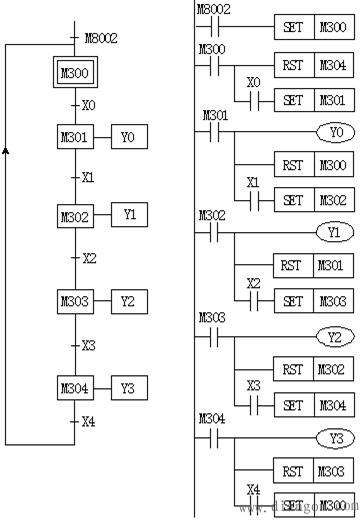
| 4.仿stl指令的编程方式 对于没有stl指令的plc,也可以仿照stl指令的设计思路来设计顺序控制梯形图,这就是下面要介绍的仿stl指令的编程方式。 如图7所示为某加热炉送料系统的功能表图与梯形图。除初始步外,各步的动作分别为开炉门、推料、推料机返回和关炉门,分别用y0、y1、y2、y3驱动动作。x0是起动按钮,x1~x4分别是各动作结束的限位开关。与左侧母线相连的m300~m304的触点,其作用与stl触点相似,它右边的电路块的作用为驱动负载、指定转换条件和转换目标,以及使前级步的辅助继电器复位。
图7加热炉送料系统的功能表图与梯形图 由于这种编程方式用辅助继电器代替状态器,用普通的常开触点代替stl触点,与使用stl指令的编程方式相比,有以下的不同之处: 1)与代替stl触点的常开触点(如图5-33中m300~m304的常开触点)相连的触点,应使用and或ani指令,而不是ld或ldi指令。 2)在梯形图中用rst指令来完成代表前级步的辅助继电器的复位,而不是由系统程序自动完成。 3)不允许出现双线圈现象,当某一输出继电器在几步中均为“1”状态时,应将代表这几步的辅助继电器常开触点并联来控制该输出继电器的线圈。 |