西门子6ES7321-1FH00-0AA0参数详细
1.前言
可编程控制器(PLC)作为一种高性能的工业现场控制装置,已广泛地用于工业控制的各个领域。目前,工业自动控制对PLC的网络通信能力要求越来越高, PLC与上位机之间、PLC与PLC之间都要能够进行数据共享和控制。
飞剪控制系统要求在远离PLC的控制室里,实时监控电机、供纸、刀辊等设备。上位机为普通PC机,下位机为 SIEMENS S7-222 PLC。在实际开发中,采用自由口通信模式,自定义 PC与 PLC的通信协议,用Step7编写PLC端的通信程序,而在 PC端用VC6.0实现串行通信的控制和监控界面的显示。
2.通信方式及原理
S7-200系列PLC通信方式有三种:一种是点对点(PPI)方式,用于与西门子公司的PLC编程器或其它产品通信,其通信协议是不公开的。另一种为DP方式,这种方式使得PLC可通过Profibus的DP通信接口接入现场总线网络,从而扩大PLC的使用范围。后一种方式是自由口(FreePort)通信方式,由用户定义通信协议,实现PLC与外设的通信。本系统中采用自由口通信方式。它是S7-200系列PLC一个很有特色的功能。这种方式不需要增加投资,具有较好的灵活性,适合小规模控制系统。自由口通信在物理接口上要求双方都使用RS485接口,波特率高为38400bps。PC机的标准串口为RS232,但西门子公司提供的PC/PPI电缆带有RS232 /RS485电平转换器,在不增加任何硬件的情况下,可以很方便地将PLC和PC机互联。
2.1自由口模式的初始化
PLC的自由口模式通信编程是对串口初始化。对S7-200PLC的初始化是通过对特殊存储字节SMB30(端口0)写入通信控制字,来设置通信的波特率、奇偶校验、停止位和数据位数。显然,这些设定必须与上位机设定值相一致。还可选择通信模式和主从站模式,各具体存储位内容可参考SIMATIC S7-200系统手册。
2.2自由口模式下收发数据
初始化自由端口通信模式后,就可以进行数据的收发。
(1) 发送数据指令 XMT
格式:XMT Table,Port。可以用 XMT指令发送数据,XMT指令激活发送缓冲区(从Table开始的变量存储区)中的数据。数据缓冲区的个数据指明了要发送的字节数,Port指明了用于发送的端口,缓冲区多可以有255个字符。在发完缓冲区的后一个字符时,会产生一个中断 (对端口 0为中断事件9)。本例的XMT缓冲区的格式如表1。其中,状态字节表示PLC是否正确接收了上位机所传数据;上传数据为PLC上传给PC的数据,需将9字节的16进制数编码为18字节的ASIIC码,字节数为18;BCC为上传数据的异或和,同样将16进制数编码为ASIIC码;结束字符的值为26。

表1 发送缓冲区
表2 接收缓冲区
RCV Table,Port。用 RCV指令接收多为255个字符的数据,这些字符存储在缓冲区中。在接收到结束字符时,会产生一个中断(对端口 0为中断事件23)。本例的RCV缓冲区的格式如表2。其中,命令类型表示上位机让PLC 执行什么操作,如读或写;目标站号是分配给PLC的一个代号;起始地址是PLC要进行读写的存储区的起始地址;读写字节数是PLC接到命令后,对存储区进行读写的字节数,本例中多写入16字节、读出9字节;写入数据是上位机要写入PLC的数据,对于读命令不起作用;BCC是从命令类型开始到写入数据为止的43字节数据的异或和。从目标站号到BCC这几项内容,都是把16进制数编码为ASIIC码来表示的。
3.自由口通信程序设计
通信程序的设计需遵循一定的规则,如中断通信处理程序要短小精悍、要避免XMT与RCV指令在一个端口执行等。整个PLC通信程序包括主程序、通信初始化子程序、校验子程序、读写数据子程序和发送完成、接收完成中断服务程序。
3.1主程序
通信主程序是PLC实现接收、发送功能的主框架。其主要流程为查询接收是否完成,校验,再根据命令类型执行读、写等操作。它的作用是控制程序的主流程,校验、读写等具体工作由相应的子程序完成。流程如图1。
3.2通信初始化程序
通信初始化子程序设置自由口通信的有关参数,对接收信息控制寄存器SMB87写入控制字,定义起始字符、结束字符和接收超时。设好自由口模式的这些参数后,还要连接中断事件和中断服务程序,并打开中断。后,把接收、发送缓冲区写入初值即可。
3.3校验子程序
每次PLC接收完1帧数据,就调用此子程序进行校验。进入子程序后,先清除接收完成标志位,再计算所接收数据的校验和BCC。如果正确,还要检验结束字符是否为‘G’。不是的话,说明数据报文长度不对或传输过程中发生了错误,需要向上位机返回相应的出错信息。流程如图2。

图1 主程序流程图
图2 校验子程序流程图
3.4读、写数据子程序
这2个子程序的任务是把PLC存储区中的数据发给上位机或把上位机传来的数据写入PLC存储区。二者的流程相似,只是数据流向不同。进入子程序后,先停止接收,完成数据传输,后发送应答报文。不同之处就是应答报文中的状态字节:读操作时是1、写操作时是2。
3.5接收、发送完成中断服务程序
当PLC接收到结束字符后产生中断(事件号9)或数据发送结束后产生中断(事件号23),这两个服务程序被执行。接收完,先把接收完标志置1,启动接收。发送完,先清除校验正确标志,再把接收缓冲区中的结束字符和计算出的接收BCC结果清零,后启动接收。
由于是半双工通信,PLC无论是发送和接收完数据后,都必须将通信口设置成接收状态。否则,PLC就接收不到任何数据了。
4.上位机的通信编程
上位机通过RS232口与PLC进行通信,bbbbbbs环境串口通信程序利用VC6编写。VC6编写串口通信程序通常有MSCOMM控件和通信API两种方法。二者各有优缺点。MSCOMM控件封装了微机串口通信的基本功能,使用者只需设置一些基本参数,就可以通过串口收发数据了。这种方法简单,易于编程人员使用,现在已有很多例子供参考。用通信API编写串口程序相对复杂一些。开发者要直接使用bbbbbbs提供的一组API函数来完成上述控件封装好的功能。使用API编程比使用控件更复杂,但也更灵活。通信控件已经封装好的功能是无法改变的,而使用API就能针对通信协议编写效率更高的代码。
在飞剪控制系统的上位机程序中,使用通信API编写了串口读写的模块。接收时,程序要查找起始字符‘g’,以确定1帧数据的开始;再根据下一个状态字节判断通信的正确性;后,把长度为23字节的数据帧接收好,并准备接收下一帧。发送过程不用判断数据内容,执行发送函数即可。需要注意的是:由于PLC通信口是半双工的,在PLC向上位机上传数据时,上位机要等1帧数据接收完毕,再执行发送操作,以避免收发冲突。

图3 上位机串口通信流程图
5.结束语
本系统取PC机和PLC各自的特点,实现了对飞剪系统的实时监控。通过利用PLC(下位机 )的自由口通信协议和上位机的VC开发工具,可以方便地开发出PC机和PLC通信应用软件。这种方法节省投资,对小规模的系统极具现实意义。系统具有实时性好、速度快、可靠性高、操作方便等优点,达到了预期的效果。经现场调试及运行表明,该系统适合于飞剪系统的实时监控
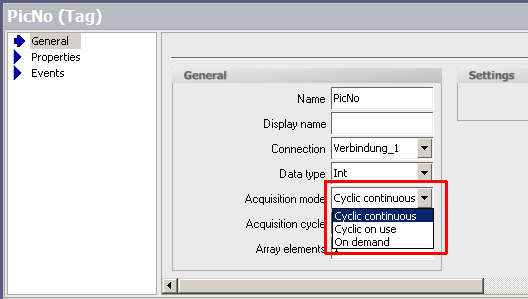
| 如果希望通过西门子plc进行画面切换,可以使用2种方式: 使用“作业邮箱”区域指针 使用触发变量 使用“作业邮箱”区域指针 在连接设置中可以找到“作业邮箱”区域指针,作业邮箱编号51执行画面切换,对于hmi面板和WinCC flexible版运行系统可以使用这个区域指针。 如果对此话题需要更多的细节,可以参考条目ID:24372078和WinCC flexible 2008通讯手册(条目ID:18797552),具体位置:“通讯部分1>与SIMATIC S7控制器通讯>用户数据区>区域指针>“作业邮箱”区域指针”。 使用触发变量
|
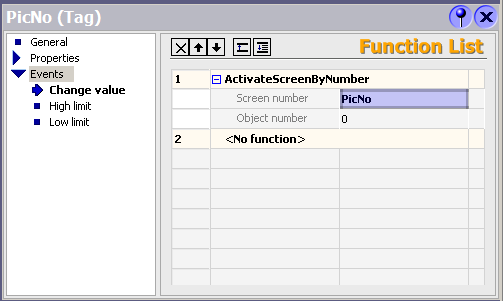
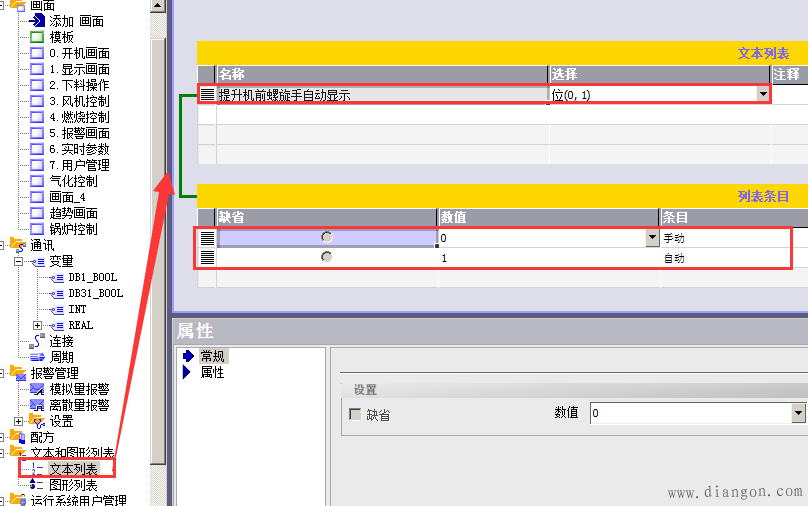
1、 在“文本和图形列表”-----“文本列表”建立一个文本列表,选择“位”类型,再属性下填写“0”状态和“1”状态对应的“文本名称”
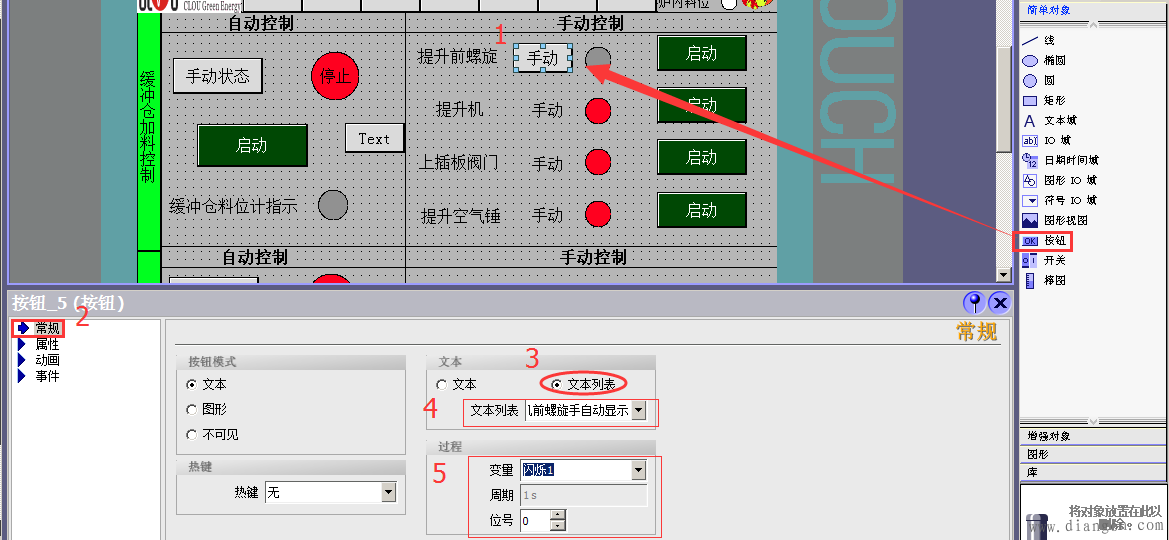
2、在画面中建立一个按钮,“常规”---勾选“文本列表”---选择步建立的文本列表---关联一个bool型变量
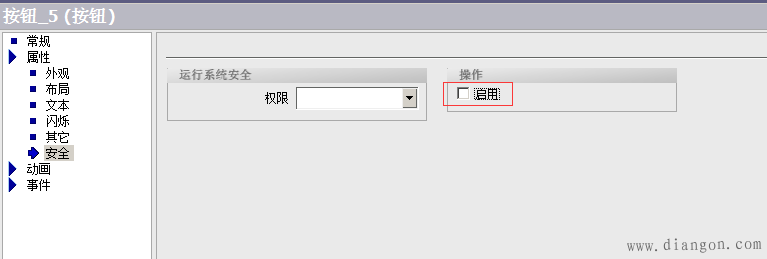
3、在“安全”栏目下----不勾选“启用”(使这个按钮不能在hmi中控制,只做显示)
|