数字量模块6ES7221-1BF32-0XB0数字量模块6ES7221-1BF32-0XB0
西门子CPU1215C处理器模块6ES7215-1HG40-0XB0
西门子CPU1217C处理器模块6ES7217-1AG40-0XB0西门子CPU1215C模块6ES7215-1HG40-0XB0
西门子CPU1217C模块6ES7217-1AG40-0XB0西门子数字量模块6ES7221-1BF32-0XB0
在PLC控制定位系统中,通常会用到相对定位、juedui定位、表格定位、原点回归等功能,针对FX5U PLC可以使用正转极限、反转极限,利用DOG搜索功能进行原点回归。此时,因原点回归的开始位置不同,原点回归动作也各不同。
由图1可以看出数字量输入信号有4个,分别是:正转极限、反转极限、近点信号、原点信号,这四个信号可以接入PLC中的X3、X2、X1、X0端子。原点回归的速度和方向都可以通过程序进行设置。
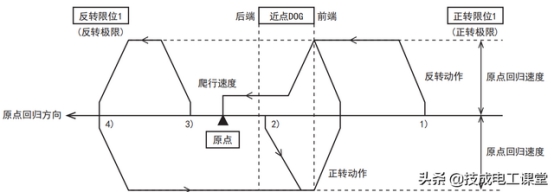
图1
针对原点回归开始位置不同,原点回归分为以下4种情况:
1) 开始位置在通过近点DOG前的时候
1. 通过执行DSZR/DDSZR指令,开始原点回归动作。
2. 以原点回归速度,向原点回归方向开始移动。
3. 一旦检测出近点DOG的前端,就开始减速到爬行速度。
4. 检测出近点DOG的后端后,在检测出指定次数的零点信号时停止。


2)开始位置在近点DOG里面的时候
1. 通过执行DSZR/DDSZR指令,开始原点回归动作
2. 以原点回归速度,向与原点回归方向的方向开始移动。
3. 一旦检测出近点DOG的前端,就进行减速停止。(离开近点DOG。)
4. 以原点回归速度,向原点回归方向开始移动。(进入近点DOG。)
5. 一旦检测出近点DOG的前端,就开始减速到爬行速度。
6. 检测出近点DOG的后端后,在检测出指定次数的零点信号时停止。
3)开始位置在通过近点DOG后的时候
1. 通过执行DSZR/DDSZR指令,开始原点回归动作。
2. 以原点回归速度,向原点回归方向开始移动。
3. 检测出反转限位1(反转极限)时减速停止。
4. 以原点回归速度,向与原点回归方向的方向开始移动。
5. 一旦检测出近点DOG的前端,就进行减速停止。(检测出(离开)近点DOG。)
6. 以原点回归速度,向原点回归方向开始移动。(进入近点DOG。)
7. 一旦检测出近点DOG的前端,就开始减速到爬行速度。
8. 检测出近点DOG的后端后,在检测出指定次数的零点信号时停止。

4)开始位置的原点回归方向的限位开关(反转限位1)为ON的时候
1. 通过执行DSZR/DDSZR指令,开始原点回归动作。
2. 以原点回归速度,向与原点回归方向的方向开始移动。
3. 一旦检测出近点DOG的前端,就进行减速停止。(检测出(离开)近点DOG。)
4. 以原点回归速度,向原点回归方向开始移动。(进入近点DOG。)
5. 一旦检测出近点DOG的前端,就开始减速到爬行速度。
6. 检测出近点DOG的后端后,在检测出指定次数的零点信号时停止。
注意:将近点DOG信号和零点信号指定为同一软元件,当原点回归零点信号数为1时,原点回归结束时的停止方法不是检测出零点信号,而是检测出近点DOG信号。
关于零点信号计数开始时间的设定,在近点DOG前端时,设定为从检测出近点DOG信号时开始对零点信号进行计数。

程序举例分3步:(1.原点回归动作描述 2.软件中参数设置 3.编写程序)
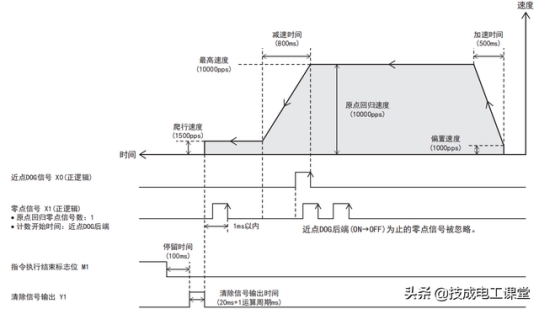
原点回归动作
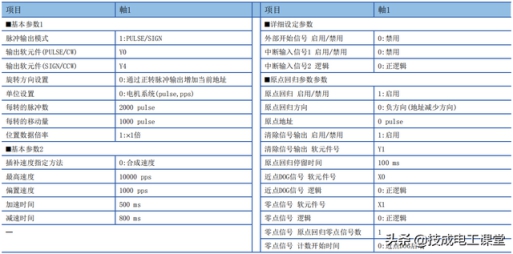
软件中参数设置
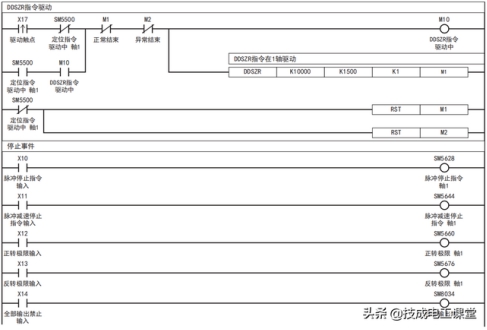
程序编写
数字量模块6ES7221-1BF32-0XB0数字量模块6ES7221-1BF32-0XB0西门子触摸屏代理商西门子电机代理商西门子PLC模块代理商西门子CPU模块代理商西门子交换机代理商西门子低压继电器代理商西门子电源模块代理商西门子电机代理商