SIMATIC S7-1200,模拟输入, SM 1231 RTD温度传感器,RTD温度传感器模块 8个模拟输入
SIMATIC S7-1200 SM 1231,AI 8x16 bit RTD
订货号: 6ES7231-5PF32-0XB0
Modbus RTU 主站编程需要调用 Modbus_Comm_Load 指令和 Modbus_Master 指令,其中 Modbus_Comm_Load 指令通过 Modbus RTU 协议对通信模块进行组态,Modbus_Master 指令可通过由 Modbus_Comm_Load 指令组态的端口作为 Modbus 主站进行通信, Modbus_Comm_Load 指令的 MB_DB 参数必须连接到 Modbus_Master 指令的(静态)MB_DB 参数。
本例中分布式机架 ET200SP 中 CM PtP 模块作为 Modbus RTU 主站,其相关编程步骤如下:
(1) OB1 中插入一个 FC,并在 FC 中拖入 Modbus_Comm_Load 指令和 Modbus_Master 指令。如图 12 所示。
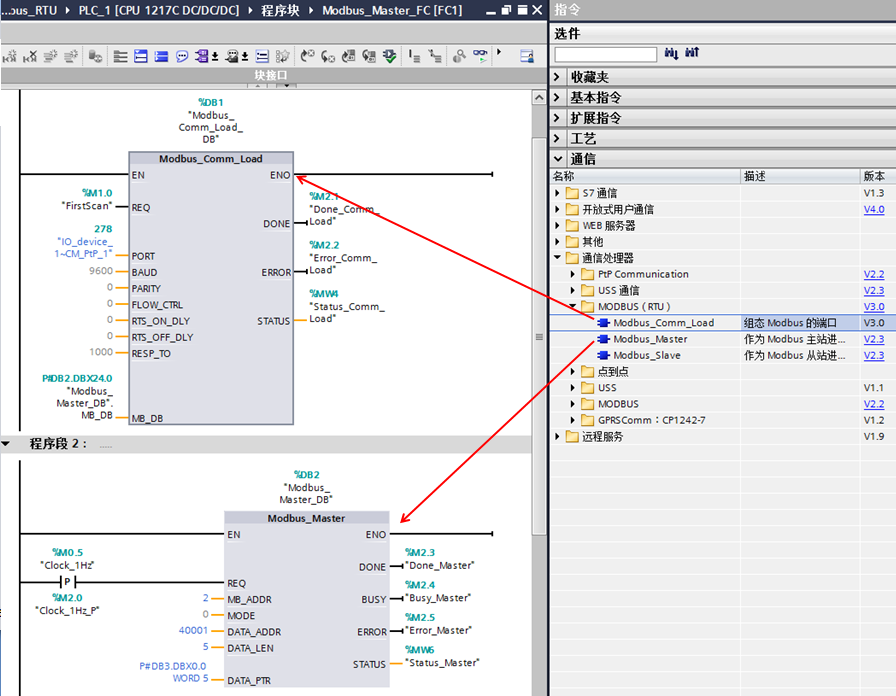
图 12. Modbus RTU 主站指令
Modbus_Comm_Load 指令各参数意义如表 1 所示:
说明 | |
REQ | 上升沿触发 |
PORT | 通信端口的硬件标识符 |
BAUD | 波特率选择:3600,6000,12000,2400,4800,9600,19200,38400,57600,76800,115200 |
PARITY | 奇偶检验选择:0-无;1-奇校验;2-偶校验 |
FLOW_CTRL | 流控制选择:0-(默认值)无流控制 |
RTS_ON_DLY | RTS 延时选择:0-(默认值) |
RTS_OFF_DLY | RTS 关断延时选择:0-(默认值) |
RESP_TO | 响应超时: 默认值 = 1000 ms。Modbus_Master 允许用于从站响应的时间(以毫秒为单位)。 |
MB_DB | 对 Modbus_Master 或 Modbus_Slave 指令的背景数据块的引用。 MB_DB 参数必须与 Modbus_Master 或 Modbus_Slave 指令中的静态变量 MB_DB 参数相连。 |
DONE | 如果上一个请求完成并且没有错误,DONE 位将变为 TRUE 并保持一个周期。 |
ERROR | 如果上一个请求完成出错,则 ERROR 位将变为 TRUE 并保持一个周期。 STATUS 参数中的错误代码仅在 ERROR = TRUE 的周期内有效。 |
STATUS | 端口组态错误代码,请参考 TIA Portal 软件在线帮助或 S7-1200 系统手册。 |
表 1. Modbus_Comm_Load 指令参数意义
Modbus_Master 指令各参数意义如表 2 所示。
说明 | |
EN | 使能端 |
REQ | TRUE = 请求向 Modbus 从站发送数据 ,建议采用上升沿触发 |
MB_ADDR | Modbus RTU 从站地址。默认地址范围:0 至 247;扩展地址范围:0 至 65535。值 0 被保留用于将消息广播到所有 Modbus 从站。 |
MODE | 模式选择: 指定请求类型(读取或写入)。 |
DATA_ADDR | 从站中的起始地址:指定 Modbus 从站中将供访问的数据的起始地址。 |
DATA_LEN | 数据长度:指定要在该请求中访问的位数或字数。 |
DATA_PTR | 数据指针: 指向要进行数据写入或数据读取的 M 区或数据块地址。 |
DONE | 完成位:上一请求已完成且没有出错后,DONE 位将保持为 TRUE 一个扫描周期时间。 |
BUSY | FALSE – Modbus_Master 无激活命令;TRUE – Modbus_Master 命令执行中 |
ERROR | |
STATUS | 端口组态错误代码,请参考 TIA Portal 软件在线帮助或 S7-1200 系统手册。 |
表 2. Modbus_Master 指令参数意义
![]() 注意:
注意:
① Modbus_Comm_Load 指令不建议在启动组织块 OB100 中调用,建议在 OB1 中调用。
Modbus_Comm_Load 指令在 OB1 中调用时,其输入位“REQ”需使用上升沿触发,本例中该输入位采用 “FirstScan” 系统存储器位。
② Modbus_Comm_Load 指令背景数据块中的静态变量 “MODE” 用于描述点对点模块的工作模式,有效的工作模式包括:
0 = 全双工 (RS232)
1 = 全双工 (RS422) 四线制模式(点对点)
2 = 全双工 (RS422) 四线制模式(多点主站)
3 = 全双工 (RS422) 四线制模式(多点从站)
4 = 半双工 (RS485) 二线制模式
该静态变量 “MODE” 默认数据为 0(RS232 全双工模式),需要根据点对点模块实际组态修改该数值,本例中 CM PtP 模块工作在 RS485 半双工模式需要将该数值修改为 4,如图 13 所示。
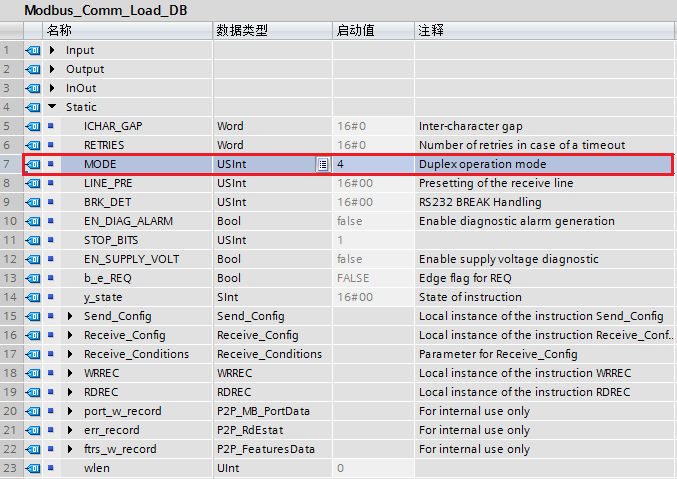
图 13. Modbus_Comm_Load 背景数据块静态变量 “MODE” 修改为 4
③ Modbus_Master 指令的 “DATA_PTR” 参数用于指向要进行数据写入或数据读取的数据区域地址,该数据区域在 V3.0 支持非优化(标准的)数据块。一般建议使用指针方式填写,例如程序中的 P#DB3.DBX0.0 WORD 5,也可以使用基本数据类型数组方式填写。指针的含义参见链接。
从 V4.0 版本开始支持优化 DB 块,具体参见链接。
在数据块的属性中取消“优化的块访问”即可将数据块修改为非优化访问的数据块(鼠标右键数据块,选择“属性”,取消“优化的块访问”),如图 14 所示。
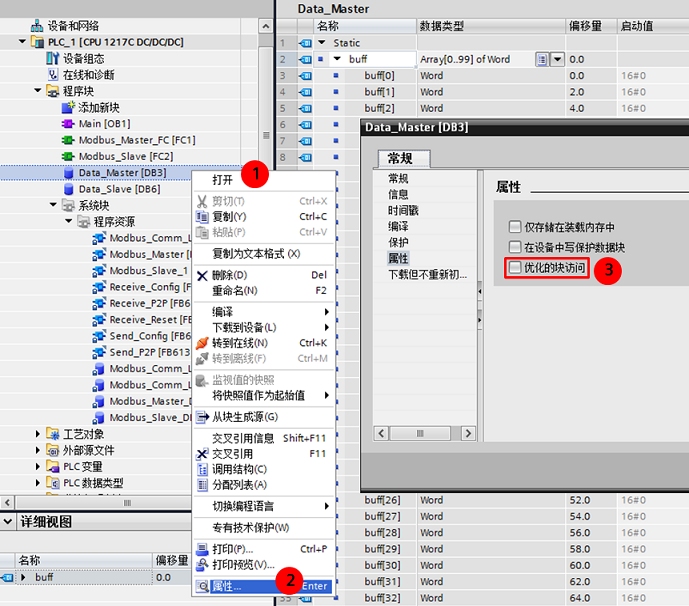
图 14. 设置数据块为非优化访问
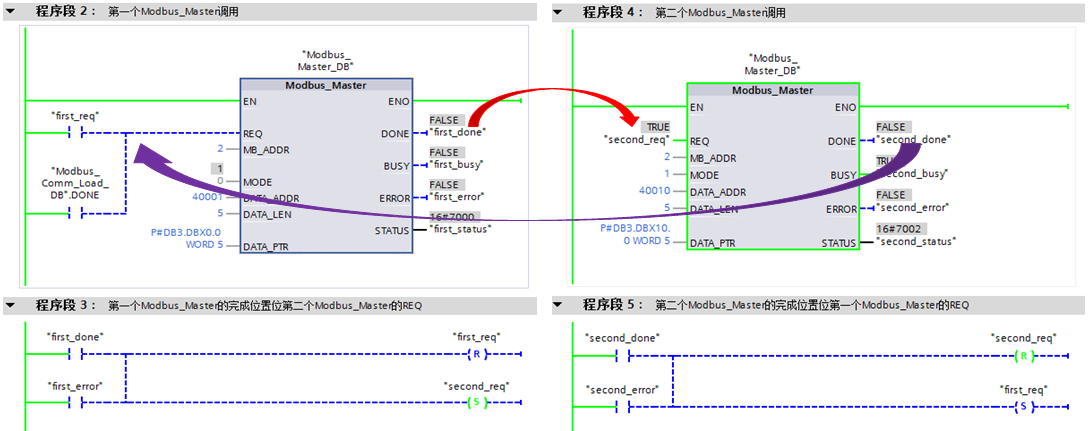
④ 当 Modbus RTU 网络中存在多个 modbus RTU 从站或一个 modbus RTU 从站需要多个作业,例如需要读和写或者读多个区域等,则需要调用多个 Modbus_Master 指令,Modbus_Master 指令之间需要采用轮询方式调用,并且使用相同背景数据块。
如图 15 所示,用于描述两个 Modbus_Master 指令轮询调用的方式。