标准型CPU 6ES7518-4AX00-1AC0德国西门子授权代理商
标准型CPU 6ES7518-4AX00-1AC0德国西门子授权代理商
标准型CPU 6ES7518-4AX00-1AC0德国西门子授权代理商
| 6ES75183AT100AB0 | SIMATIC S7-1500, CPU 1518-3 PN,中央处理器 带工作存储器 12 MB 用于程序和 150 MB 用于 数据,第 1 个接口: PROFINET IRT 带双口交换机, 第 2 接口:PROFINET IRT 带双口交换机, 第 3 接口:以太网, 0.3 纳秒位性能, 需要 SIMATIC 存储卡 |
| 6ES75184AP000AB0 | CPU 1518-4 PN/DP,6 MB 程序, 60MB 数据;1 ns;集成 X1: 2x PN接口 ,X2: 1x PN接口,X3:1x 1000M以太网,X4: 1x DP接 |
| 6ES75184AX001AC0 | CPU 1518-4 PN/DP MFP,6 MB 程序,60 MB 数据;1 ns;集成 X1: 2x PN接口 ,X2: 1x PN接口,X3:1x 1000M以太网,X4: 1x DP 接口; 可C/C++扩展PLC功能, 至少需要2GB SIMATIC Memory Card。另有一个嵌入式Linux系统,可用C/C++开发Linux应用。该订货号包含MFP CPU、C/C++ 运行授权、 OPC UA 授权 |



一、特殊辅助继电器
相关特殊辅助继电器如下表所示。Y000、Y001、Y002、Y003为脉冲输出端软元件。

1.在实际编程过程种,把M8029和M8329写在定位指令后面,来判断这条定位指令是否正常完成,定位指令正常运行完成,m8029会导通一个扫描周期,m8329会导通一个扫描周期。
2.脉冲输出中监控常用于监控当前轴是否处于运动状态。
3.原点回归方向指定用来改变当前轴回原点的方向,当发现回原点方向不是实际需要回原点的方向,改变这个特殊继电器。
4.正转极限和反转极限,一般是用外部极限传感器的X点来驱动。
二、特殊数据寄存器
相关特殊数据寄存器如下表所示。Y000、Y001、Y002、Y003为脉冲输出端软元件。
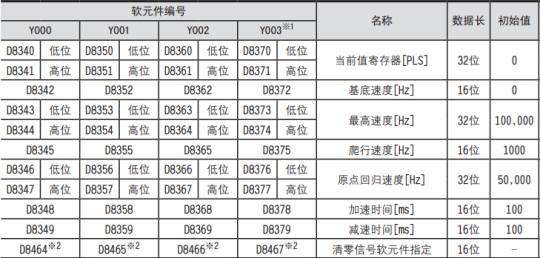
1. 当前值寄存器D8340用来记录当前脉冲轴位置,常用于DMOV传送到其他寄存器,注意寄存器要间隔使用,占用32位,目的是为了记录更大的数据,如果寄存器连着使用,会造成寄存器之间数据冲突,导致数据异常
2. 基地速度D8342,用于设定当前脉冲轴回原点的基地速度,是当前脉冲轴的一个最低速度。
3. 原点回过速度D8346用于设定一个回原点的一个速度。
4. 爬行速度D8345,是脉冲轴运行了回原点速度后当碰到原点后,有一个减速过程,切换成爬行速度,在离开原点的时候,停止脉冲轴,并对当前脉冲轴位置清零。
5. 加减速时间的设定是为了轴启动和轴停止的时候,有一个平滑的过渡。
五、原点回归指令举例一、ZRN指令
1、指令格式 ZRN S1 S2 S3 D
S1:指令开始原点回归的速度
S2: 指令爬行速度
S3:指定输入近点信号的软元件编程
D:指定要输出脉冲的输出
2、举例
ZRN D0 D2 X1 Y0—按下X1启动后,Y0后发出以D0为频率的回归速度(通常较快),到达X1原点开关位置,变为以D2为频率的爬行速度(一般比较慢)到刚好离开X1的位置后停下,为机械原点和程序原点重合;
3、注意
D8340为记录当前脉冲轴当前位置,回零点完成后D8340的值自动清零;
每次在执行回原点的时候,需要保证轴的当前位置在原点的正方向
二、DSZR指令
1、指令格式 DSZR S1 S2 D1 D2
S1:近点输入信号。
S2:零点输入信号。
D1:脉冲输出端。
D2:电机旋转方向信号的输出端。
2、举例
DSZR是带DOG搜索的原点回 归指令;例如 DSZR X0 X1 Y0 Y3;那么X0是原点接近信号,X1是原位置信号,Y0是脉冲输出信号,Y3是方向输出信号。