吉林西门子(中国)授权总代理商
这个转速等于转子的固有频率。当转速继续增大,接近倍固有频率时振幅又会增大,当转速等于倍固有频率时称为二阶临界转速,依次类推有三阶四阶等临界转速。

若以中继器连接,站之间的距离可达9100m,可多也只能用10个中继器,它还占用节点数。MPI的网络组建:利用STEP7的configuretion里的功能可以给每一个网络节点分配一个MPI地址和高地址,连接是需要在MPI网络的***个节点和后一个节点加终端电阻。
矢量控制方式就是将定子电流分解成规定的磁场电流和转矩电流,分别进行控制,将两者合成后的定子电流输出给电动机。从原理上可得到与直流电动机相同的控制性能。采用转矩矢量控制功能,电动机在各种运行条件下都能输出大转矩,尤其是电动机在低速运行区域。现在的变频器几乎都采用无反馈矢量控制,由于变频器能根据负载电流大小和相位进行转差补偿,使电动机具有很硬的力学特性,对于多数场合已能满足要求,不需在变频器的外部设置速度反馈电路。

PLC以MPI来实现通讯,可用三种方式解决。全局数据包通讯方式、无组态连接通讯方式、组态连接通讯方式。实现全局数据包通讯方式:在PLC硬件配置过程,组态需要通讯的PLC站之间的发送区和接收区不需要任何程序处理,只适应s7-300/400之间的通讯。
多也只在一个项目中的15个CPU之间建立全局数据。实现全局数据通讯方法:全局数据包通讯SMATICManage里设置s7-300/400MPI的地址,在选项/定义全局数据里定义需要通讯的数据地址。带>符号的表示发送数据,对应栏里的是接受数据,终将设置好的项目下载到PLC即可实现MPI通讯。
1、开路漏电流:三菱plc开路漏电流是指输出处于OFF状态时,输出回路中的电流。继电器输出型输出接点OFF是无漏电流;晶体管输出型漏电流在0.1mA以下;晶闸管较大漏电流,主要由内部RC电路引起,需在设计系统时注意。
2、响应时间:响应时间是指PLC从ON状态转变成OFF状态或从OFF状态转变成ON状态所需要的时间。继电器输出型响应时间平均约为10ms;晶闸管输出型响应时间为1ms以下;晶体管输出型在0.2ms以下为快。
3、输出电流:三菱plc继电器输出型具有较大的输出电流,AC250V以下的电路电压可驱动纯电阻负载2A/1点、感性负载80VA以下(AC100V或AC200V)及灯负载100W以下(AC100V 或200V)的负载;Y0、Y1以外每输出1点的输出电流是0.5A,由于温度上升的原因,每输出4合计为0.8A的电流,输出晶体管的ON电压约为1.5V,驱动半导体元件时,请注意元件的输入电压特
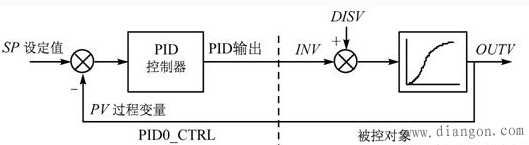
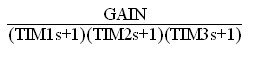
PID控制的难点在于整定控制器的参数。为了学习整定PID控制器参数的方法,必须做闭环实验,开环运行PID程序没有任何意义。用硬件组成一个闭环需要plc的CPU模块、模拟量输入模块和模拟量输出模块,还需要被控对象、检测元件、变送器和执行机构。例如可以用电热水壶作为被控对象,用热电阻检测温度,用温度变送器将温度转换为标准电压,用移相控制的交流固态调压器作执行机构。 被控对象的数学模型为3个串联的惯性环节,其增益为GAIN,3个惯性环节的时间常数分别为TIM1~TIM3。其传递函数为
将上图中的积分时间由0.03min(分钟)增大到0.12min,下图的超调量有明显的减小。通过修改PID的参数,观察被控量阶跃响应曲线给出的超调量和调节时间等特征量的变化情况,可以形象直观、快速地学习和掌握PID参数的整定方法。 |