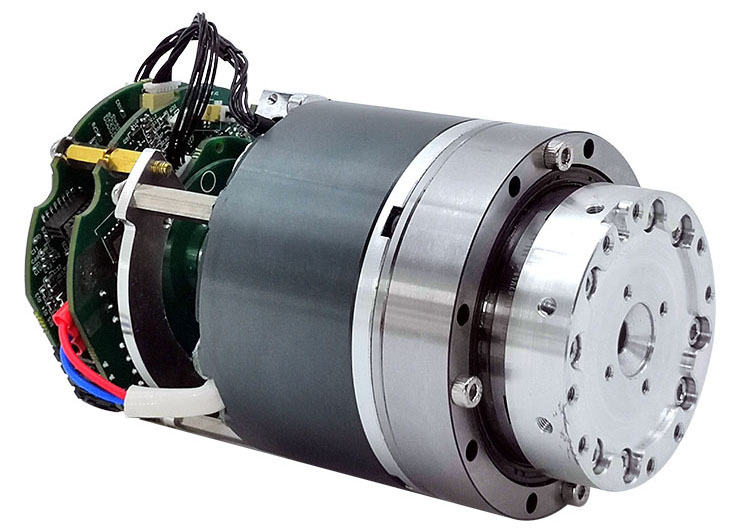

【主要特性】
无封装外壳
以满足客户自主设计机械臂外形的需求
更精/准
采用双编码器实现全闭环控制,输出端重复定位精度可达0.001°
更轻巧
减速器采用中空超扁平设计,结构更紧凑,整机更小巧,关节自重更轻,重量<1.2Kg。
超大力矩
连续输出扭矩为10~450N.m。
应用范围广
自动化组装生产,自动化物流分拣,无人零售,康复医疗及手术辅助,电力巡检等
更安全
驱动器过流、过温、过压欠压、位置超差、短路、I2t、控制错误等全面的安全保护设计
更方便
常规为48VDC供电,24~60VDC之间供电可选
低功耗
RJU14正常工作仅20W,3KG协作机器人普通工况下功耗约150W。
更友善
EtherCAT,CANopen通信可选,支持大部分主流机器人控制器
定制
为客户提供OEM定制化服务
【规格参数】
| 基本性能 | ||
| 参数 | 单位 | RJUZ14/RJU14 |
| 启停容许转矩 | Nm | 34 |
| 平均负载转矩 | Nm | 13.5 |
| 静态负载转矩 | Nm | 21.2 |
| 瞬时转矩 | Nm | 66 |
| 许用弯矩 | Nm | 41 |
| 瞬时弯矩 | Nm | 80 |
| 额定转速 | rpm | 29.7 |
| 转速 | rpm | 47.5 |
| 电气性能 | ||
| 电机额定功率 | W | 118 |
| 电机额定电压 | VDC | 48 |
| 电机额定电流 | A | 4.2 |
| 峰值电流 | A | 10.5 |
| 通讯协议 | -- | EtherCAT/CANopen |
| 机械性能 | ||
| 关节重量 | kg | 1.14/1.47 |
| 关节直径 | mm | 70/76 |
| 关节长度 | mm | 107/117.5 |
| 抱闸 | -- | 插销式(UR类型) |
| 输出端编码器 | -- | 17位单圈编码器 |
| 电机编码器 | P/R | 20000 |
| 减速器速比 | -- | 101 |