西门子进线电抗器6SL3000-0CE15-0AA0
可通过CM PTP通信模块与外部通信伙伴连接以交换数据。由于有大量参数设置选项,可以针对通信伙伴灵活调整控制。
Modbus RTU 主站可为zui多 30 个 Modbus 从站创建一个 Modbus RTU 网络。
可为您提供下列通讯模板:
CM PtP RS232 BA;
带有 RS232 接口的通信模块,适用于协议 Freeport、3964(R) 和 USS;9 针 Sub D 连接器,zui高 19.2 Kbit/s,1 KB 帧长度,2 KB 接收缓冲区
CM PtP RS232 HF;
带有 RS232 接口的通信模块,适用于协议 Freeport、3964(R) 和 Modbus RTU;9 针 Sub D 连接器,zui高 115.2 Kbit/s,4 KB 帧长度,8 KB 接收缓冲区
CM PtP RS422/485 BA;
带有 RS422 和 RS485 接口的通信模块,适用于协议 Freeport、3964(R) 和 USS;15 针 Sub D 插座,zui高 19.2 Kbit/s,1 KB 帧长度,2 KB 接收缓冲区
CM PtP RS422/485 HF;
带有 RS422 和 RS485 接口的通信模块,适用于协议 Freeport、3964(R)、USS 和 Modbus RTU;15 针 Sub D 插座,zui高 115.2 Kbit/s,4 KB 帧长度,8 KB 接收缓冲区
CM 1542-5 通信模块通过附加的 PROFIBUS 连接对 SIMATIC S7-1500 控制器加以扩展,这个附加连接可用于带宽为 9.6 kbit/s 至 12 Mbit/s 的下层 PROFIBUS 设备进行通信。通过此模块,还可实现单独的 PROFIBUS 线路;换言之,通过几个 PROFIBUS 网段来控制多个现场设备。CM 1542-5 处理所有通信任务,从而降低了 CPU 的负荷。
除常规 PROFIBUS 通信外,CM 1542-5 还适用于 S7 通信。这样就可以建立 S7-1500 控制器与其它设备间的通信,例如,与 SIMATIC S7-300/400 系列中的设备建立通信。

该应用的实现使用了S7-1500 的运动控制指令 "MC_MoveAbsolute" 和 "MC_Halt"。
使用SIMODRIVE驱动器,可以使用“连续定位-正向”和“连续定位-负向”来实现在点动模式下,即便点动的命令一直处于激活状态,也能使轴在极限开关处能自动受控的停止而不报错,
在这应用场合下不能使用 S7-1500 的 指令"MC_MoveJog"来实现该功能。使用S7-1500 SMC(SIMATIC运动控制)的点动模式,轴始终在位置控制下运行。换而言之,轴通常不会在软限位开关外运行,而是**的定位到极限开关的位置。这种情况下的报错需要被确认。
如果要实现和 SIMODRIVE一样的功能,需要利用"MC_MoveAbsolute" 和 "MC_Halt"指令来编写一个点动模式。
对"MC_MoveAbsolute" 指令,需要定义一个距离极限开关1 到 3 mm以内的位置和一个点动速度
使用点动按钮的上升沿来触发"MC_MoveAbsolute" 指令.
使用点动按钮的下降沿来触发 "MC_Halt" 指令.
通过这种方式,按下点动按钮开始进行定位到限位开关之前的一个位置。当松开点动按钮,定位停止,轴也随之停止。可以使用这种方式来点动轴。当轴达到终点位置(极限开关前1到3mm),轴自动停止,即便持续按下点动按钮也不会继续动作。
示例
在以下示例中极限开关分别位于0mm和2000mm处。点动速度设定为 50mm/s.
CPU 1511-1 PN 是经济型入门级 CPU,用于不连续生产技术中对处理速度和响应速度要求不高的应用。 CPU 1511-1 PN/DP 可以用作 PROFINET IO 控制器,也可以用作分布式智能设备 (PROFINET 智能设备)。 集成式 PROFINET IO IRT 接口设计为 2-端换机以便在系统中设立总线型拓扑。 CPU 通过易组态的块提供全面控制功能,以及通过标准化 PLC-open 块 提供连接至驱动器的能力。
适用于具有中等要求的应用的 CPU,用于 S7-1500 控制器产品系列中的程序/数据存储
具有高处理速度,适用于二进制和浮点运算
在具有集中式和分布式 I/O 的生产线上作为集中式控制器使用
PROFINET IO IRT 接口,带 2 端换机
PROFINET I/O 控制器,用于在 PROFINET 上运行分布式 I/O
用于连接 CPU 作为 SIMATIC 或 非西门子 PROFINET I/O 控制器下的 PROFINET 设备的 PRIFINET 智能设备
OPC UA 服务器(数据访问)作为运行时选件,可轻易将 SIMATIC S7-1500 连接至第三方设备/系统
等时同步模式
集成运动控制功能,用于控制速度控制轴和定位轴,支持外部编码器,凸轮/凸轮轨道和探头
用于诊断集成 服务器,带有创建用户定义的 站点的选项
西门子CPU1513-1 PN 的特点:
功能强大的处理器:
该 CPU 的单条二进制命令的命令执行时间可低至 40 ns。
大容量工作存储器:
300KB,用于程序;1.5 MB,用于数据
采用 SIMATIC 存储卡作为加装存储器;
允许实现例如数据日志和归档等其它功能
灵活的扩展功能:
单层组态zui多可支持 32 个模块(CPU + 31 个模块)
显示器的功能为:
显示概览信息,例如,集成接口的 IP 地址、站名称、**别名称、位置名称等。
显示器以及诊断确认和用户消息
模块信息显示
显示设置
显示可由用户定义的徽标
IP 地址设置
日期和时间设置
选择操作模式
复位 CPU 至出厂设置
项目的备份与恢复
禁用/启用显示屏
启用保护级别
PROFINET IO IRT 接口用于通过 PROFINET 进行分布式 I/O 连接
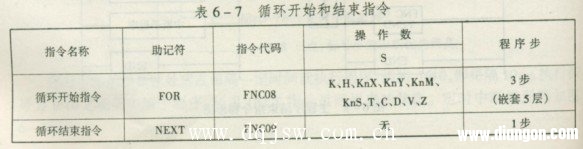
(1)循环开始和结束指令的助记符、指令代码、操作数及程序步见表6—7所列。
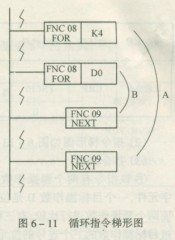
(2)指令梯形图如图6—11所示。
(3)指令说明:
①FOR~NEXI’之间的循环可重复执行n次(由源数据指定次数)。但执行完后,程序就转到紧跟在NEXT指令后的步序。n=l~2767为有效。
②图6一11中,DO的数据为5时,每执行一次A的程序,B的程序就执行5次,由于A要执行4次,那么,B的程序总共要执行20次。
③在FOR~NEXT指令内*多可嵌套5层其他的FOR~NEXT指令。但下列的任一种情况都会导致出错。
·NEXT指令写在FOR指令之前。
·缺少NEXT指令。
·NEXT。指令写在FEND、END指令之后。
·NEXT指令与FOR指令数目不一致。
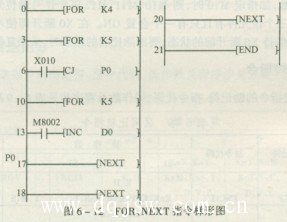
例6—1分析下列程序(见图6—12),当x10接通后运行和断开时运行DO的结果。
分析:当x10接通后运行该程序,则条件跳转指令(CJ P0)起作用,跳过加1指令(1NC DO),DO=0。当C10断开后再运行该程序,条件跳转指令(cJ Po)不起作用,要执行加1指令(INC DO),DO=100