徐州西门子专业授权代理商
按照工艺控制和生产安全的要求,要求该系统将液位控制在一定高度。根据工艺的要求,输入泵和输出泵均选用容积泵,并且可进行大范围无级调速。接到一个任务,需要认真地分析和比较各种可能的控制方案。不要急于计算参数,更不要急于动手编写程序,仅就上面的液位定值控制系统而言,就可有两种控制方案。*种是输出泵作为系统流量的主导设定泵,而输入泵作为液位控制泵,也就是输入流量作为控制变量。另一种是输入泵作为系统流量的主导设定泵,而输出泵作为液位控制泵,也就是输出流量作为控制变量。单纯从控制的角度而言,两种方案差别很小。从工艺流程的角度来看,前者能向下游设备提供较平稳的物料,向上游设备索取的物料可能随时发生变化,后者的情况则正好这是需要从生产全局稳定的角度,由工艺工程师选择一种影响较小的方案。如果从生产安全的方面考虑,例如当设备发生故障时,将会产生什么后果?哪种后果比较严重?假设该设备溢出时的后果比抽干时更严重,显然用*方案较安全。因为输出通道故障停机时,控制器将命令输入通道自动停止进液。如果输入通道失灵,不执行控制器的指令,只会造成被抽干的后果。本例采用*方案。此时输出泵流量的变化可视为对该控制回路的干扰。
当然,为了生产安全,无论采用何种方案,都必须设计保护系统,这将在后面介绍。
画出这个控制回路的信号流程图,如图7-2所示。
图7-2 信号流程图
(1) BI输入泵。它工作时的流量QI与拖动它的电动机转速基本成正比,电动机的转速与输入变频器送出的电源频率成正比,变频器送出的频率与它从D/A转换器接收的电流信号成正比,而D/A转换器输出电流与由PLC送出的数字信号DI成正比。有
QI=KI×DI (7-1)
式中所有的静态转换系数之积,用KI表示;
(2) Bo输出泵。同理,有
Qo=Ko×Do
(3) SL液位传感器。它的量程为L。其输出的模拟信号经过A/D转换后,成为数字量DL被PLC读入,它与液位高低成正比,即
DL=KL×H (7-2)
它的转换系数用KL表示。
以上这些辅助设备,也就是用作执行机构和测量回路的设备,一经选定,所有的参数便成为已知常数。它与我们所控制的对象(过程)并不再有直接关系。
图7-3是控制系统框图。下面来介绍被控制对象。它的输入参数是输入流量QI,输出的被控参数是液位H。这个特定的对象比较简单,它的输出值与其输入值的积分成正比。比例系数是Ks=4/(πD²)=常数。通常,称这种关系为对象的“数学模型"。实际上很多被控对象都难以得到它的数学模型。使用PID算法,也并不要求准确地知道数学模型,这并非意味着可以对它一无所知。在设计系统的执行机构(驱动机构)时,必须了解控制变量的大致工作范围。选用测量装置时,还必须了解被控制变量的大致工作范围。在系统硬件设计好之后,也希望了解它的比例系数(增益)以及输出对输入变化反应的快慢。
SIMATIC S7-1500 采用模块化结构,各种功能皆具有可扩展性
200-240V 30 kW 无内置滤波器

“库存储器"按钮
2)在弹出的选项卡中设置库指令数据区,如图5所示:
图5. 缺省情况下是从VB0开始,但要保证该存储器使用地址范围与其他程序使用的地址不能有重叠。按“建议地址"按钮也可以自动分配。
可以使用 “建议地址" 设置数据区,但要注意编程软件设置的数据区地址,只考虑到了其他一般寻址,而未考虑到诸如Modbus数据保持寄存器区等的设置。应当确保不与其他任何已使用的数据区重叠、冲突。不应重复按 “建议地址" 按钮,否则也会造成混乱。
关于 Modbus RTU 主站协议库的补充说明
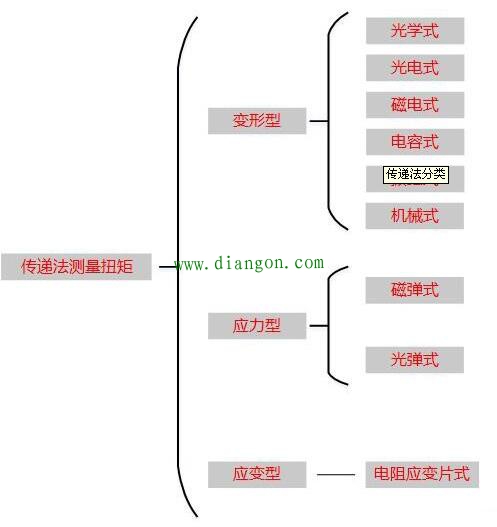
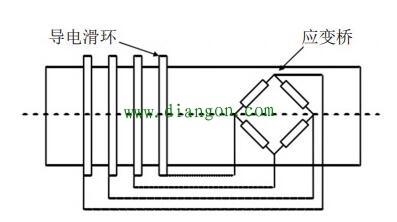
| 扭矩是电机试验中一个重要的参数,尤其是在电机效率评测中扭矩更是一个不可或缺的被测量,扭矩测量的准确性直接关系到电机效率的评测的正确性。目前使用的扭矩测量方法按照测量原理可分为平衡力法、传递法和能量转换法。 一、平衡力法 处于匀速工作状态的传动机械构件,其主轴和机体上一定存在一对扭矩 T 和 T′,并且二者大小相等、方向通过测量机体上的 T′来测量主轴上 T 的方法称为平衡力法。设 F 为力臂上的作用力,L 为力臂长度,则 T′=LF。通过测量作用力F和力臂L即可得出 T′和 T。平衡力法的优点是不存在传递扭矩信号的问题,力臂上的作用力 F容易测得;缺点是测量范围仅局限为匀速工作状态,无法完成动态扭矩的测量。 二、传递法 传递法利用传递扭矩时弹性元件的物理参数会发生某种程度的变化。利用这种变化与扭矩的对应关系来测量扭矩。按照不同的物理参数,可将传递法划分为磁弹性式、应变式、振弦式、光电式等,目前传递法在扭矩测量领域应用*为广泛。
|