甘南西门子专业授权代理商
交流伺服定子的构造基本上与分相式单相相似,如图所示。其定子上装有两个位置互差90°的绕组,一个是励磁绕组rf,它始终接在交流电压uf上;另一个是控制绕组l,联接控制信号电压uc。交流伺服电动机又称两个伺服电动机。
交流伺服电动机的转子通常做成鼠笼式,但为了使伺服电动机具有较宽的调速范围、线性的机械特性,无“自转”现象和快速响应的性能,它与普通电动机相比,应具有转子电阻大和转动惯量小这两个特点。


目前应用较多的转子结构有两种形式:
一种是采用高电阻率的导电材料做成的高电阻率导条的鼠笼转子,为了减小转子的转动惯量,转子做得细长; 另一种是采用铝合金制成的空心杯形转子,杯壁很薄,仅0.2-0.3mm,为了减小磁路的磁阻,要在空心杯形转子内放置固定的内定子,如图所示。
交流伺服电动机在没有控制电压时,定子内只有励磁绕组产生的脉动磁场,转子静止不动。当有控制电压时,定子内便产生一个旋转磁场,转子沿旋转磁场的方向旋转,在负载恒定的情况下,电动机的转速随控制电压的大小而变化,当控制电压的相位时,伺服电动机将反转。
交流伺服电动机的工作原理与分相式单相异步电动机相似,但前者的转子电阻比后者得多,伺服电动机与单机异步电动机相比,有三个显著特点:
一、起动转矩大
由于转子电阻大,其转矩特性曲线如图中曲线1所示,与普通异步电动机的转矩特性曲线2相比,有明显的区别。它可使临界转差率s0>1,这样不仅使转矩特性(机械特性)更接近于线性,具有较大的起动转矩。当定子一有控制电压,转子立即转动,即具有起动快、灵敏度高的特点。
二、运行范围较宽
如图所示,较差率s在0到1的范围内伺服电动机都能稳定运转。

较差率
三、无自转现象
正常运转的伺服电动机,只要失去控制电压,电机立即停止运转。当伺服电动机失去控制电压后,它处于单相运行状态,由于转子电阻大,定子中两个方向旋转的旋转磁场与转子作用所产生的两个转矩特性(t1-s1、t2-s2曲线)以及合成转矩特性(t-s曲线)如图所示,与普通的单相异步电动机的转矩特性(图中t′-s曲线)不同。这时的合成转矩t是制动转矩,从而使电动机迅速停止运转。

转矩特性曲线
图是伺服电动机单相运行时的机械特性曲线。负载一定时,控制电压uc愈高,转速也愈高,在控制电压一定时,负载增加,转速下降。
伺服系统是的重要组成部分,是连接数控装置(计算机)和机床之间的关键桥梁,伺服系统的性能在很大程度上决定了数控机床的性能,如数控机床的定位精度、跟踪精度、*高移动速度等重要指标。建议我们先来学习一些基础概念,再学习各种进给伺服系统的控制方式。深刻理解掌握这部分知识,会对更好的学习后面的数控加工工艺有一定的帮助。
1、进给伺服系统
1)组成
进给伺服系统是以机床移动部件(如工作台)的位置和速度作为控制量的自动控制系统,通常由伺服驱动装置、、机械传动机构及执行部件组成。 见图1所示。
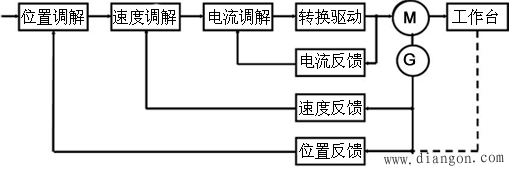
图1 伺服系统的组成
2) 作用
接受数控装置发出的进给速度和位移指令信号,由伺服驱动装置作一定的转换和放大后,经伺服电机(直流、交流伺服电机、功率等)和机械传动机构,驱动机床的工作台等执行部件实现工作进给或快速运动。
3) 基本技术要求
1)精度高
2)稳定性好
3)快速响应
4)调速范围宽
4) 分类
☆步进电机驱动系统
☆直流伺服驱动系统:永磁直流伺服
☆交流伺服驱动系统:永磁交流伺服电动机
2、开环控制伺服系统
开环进给伺服系统是数控机床中*简单的伺服系统,执行元件一般为步进电机,其控制原理如图2所示。

图2 开环控制数控机床

图3 半闭环控制数控机床
3、半闭环控制伺服系统
采用旋转型角度测量元件(脉冲编码器、旋转变压器、圆感应同步器等)和直流伺服电动机按照反馈控制原理构成的位置伺服系统,其控制原理见图33所示。
4、闭环控制伺服系统
其控制原理见图4。
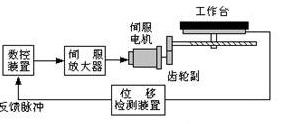
图4 闭环控制数控机床
进给伺服系统是数控系统主要的子系统。如果说cnc装置是数控系统的“大脑”,是发布“命令”的“指挥所”,那么进给伺服系统则是数控系统的“四肢”,是一种“执行机构”。它忠实地执行由cnc装置发来的运动命令,**控制执行部件的运动方向,进给速度与位移量。
伺服系统是典型的开环控制系统,指令信号是单向流动的。开环系统没有位置和速度反馈回路,省去了检测装置,其精度主要由步进电机来决定,速度也受到步进电机性能的限制,系统简单可靠,不需要像闭环伺服系统那样进行复杂的设计计算与试验验证。
步进开环伺服系统由于具有结构简单、使用维护方便、可靠性高、制造成本低等一系列优点,在中小型机床和速度、精度要求不十分高的场合,得到了广泛的应用。
1.步进电动机的种类和结构
步进电动机的分类方式很多,根据不同的分类方式,可将步进电动机分为多种类型,如表1所示。

步进电机在结构上分为定子和转子两部分,现以图2所示的反应式三相步进电机为例加以说明。定子上有六个磁极,每个磁极上绕有励磁绕组,每相对的两个磁极组成一相,分成a、b、c三相。在定子的每个磁极上开了5个小齿,齿宽相等,齿间夹角是9°。转子无绕组,它是由带齿的铁心做成的。有均匀分布的40个小齿,齿间夹角也是9°。定子磁极上的小齿在空间位置上依次错开1/3齿距。

图2 步进电机结构原理图
2.步进电动机的工作原理
步进电机是按电磁吸引的原理工作,现以反应式步进电机为例说明其工作原理。反应式步进电机的定子上有磁极,每个磁极上有激磁绕组,转子无绕组,有周向均布的齿,依靠磁极对齿的吸合工作。如图3所示为三相步进电机,定子上有三对磁极,分成a、b、c三相。
