6ES7 212-1BE40-0XB0参数详细
PLC的故障诊断是一个十分重要的问题,是保证PLC控制系统正常、可靠运行的关键。本文对常用的故障诊断方法进行了探讨。在实际工作过程中,应充分考虑到对PLC的各种不利因素,定期进行检查和日常维护,以保证PLC控制系统安全、可靠地运行
PLC的硬件组成部分都有哪些
PLC的硬件主要由中央处理器(CPU)、存储器、输入单元、输出单元、通信接口、扩展接口电源等部分组成。其中,CPU是PLC的核心,输入单元与输出单元是连接现场输入/输出设备与CPU之间的接口电路,通信接口用于与编程器、上位计算机等外设连接。
对于整体式PLC,所有部件都装在同一机壳内;对于模块式PLC,各部件独立封装成模块,各模块通过总线连接,安装在机架或导轨上。无论是哪种结构类型的PLC,都可根据用户需要进行配置与组合。
整体式与模块式PLC的结构不太一样,但各部分的功能作用是相同的,下面对PLC主要组成各部分进行简单介绍。
1、中央处理单元(CPU)

同一般的微机一样,CPU是PLC的核心。PLC中所配置的CPU 随机型不同而不同,常用有三类:通用微处理器(如Z80、8086、80286等)、单片微处理器(如8031、8096等)和位片式微处理器(如AMD29W等) 。小型PLC大多采用8位通用微处理器和单片微处理器;中型PLC大多采用16位通用微处理器或单片微处理器;大型PLC大多采用高速位片式微处理器。
目前,小型PLC为单CPU系统,而中、大型PLC则大多为双CPU系统,甚至有些PLC中多达8 个CPU。对于双CPU系统,一般一个为字处理器,一般采用8位或16位处理器;另一个为位处理器,采用由各厂家设计制造的芯片。字处理器为主处理器,用于执行编程器接口功能,监视内部定时器,监视扫描时间,处理字节指令以及对系统总线和位处理器进行控制等。位处理器为从处理器,主要用于处理位操作指令和实现PLC编程语言向机器语言的转换。位处理器的采用,提高了PLC的速度,使PLC更好地满足实时控制要求。
在PLC中CPU按系统程序赋予的功能,指挥PLC有条不紊地进行工作,归纳起来主要有以下几个方面:
1)接收从编程器输入的用户程序和数据。
2)诊断电源、PLC内部电路的工作故障和编程中的语法错误等。
3)通过输入接口接收现场的状态或数据,并存入输入映象寄有器或数据寄存器中。
4)从存储器逐条读取用户程序,经过解释后执行。
5)根据执行的结果,更新有关标志位的状态和输出映象寄存器的内容,通过输出单元实现输出控制。有些PLC还具有制表打印或数据通信等功能。
2、存储器
存储器主要有两种:一种是可读/写操作的随机存储器RAM,另一种是只读存储器ROM、PROM 、EPROM 和EEPROM。在PLC中,存储器主要用于存放系统程序、用户程序及工作数据。
系统程序是由PLC 的制造厂家编写的,和PLC的硬件组成有关,完成系统诊断、命令解释、功能子程序调用管理、逻辑运算、通信及各种参数设定等功能,提供PLC运行的平台。系统程序关系到PLC的性能,在PLC使用过程中不会变动,是由制造厂家直接固化在只读存储器ROM、PROM或EPROM中,用户不能访问和修改。
用户程序是随PLC的控制对象而定的,由用户根据对象生产工艺的控制要求而编制的应用程序。为了便于读出、检查和修改,用户程序一般存于CMOS静态RAM中,用锂电池作为后备电源,以保证掉电时不会丢失信息。为了防止干扰对RAM中程序的破坏,当用户程序经过运行正常,不需要改变,可将其固化在只读存储器EPROM中。现在有许多PLC直接采用EEPROM作为用户存储器。
如果可接入正余弦编码器的伺服驱动器能够为用户提供从C、D中获取的单圈位置信息,则可以考虑:1.用一个直流电源给电机的UV绕组通以小于额定电流的直流电,U入,V出,将电机轴定向至一个平衡位置;2.利用伺服驱动器读。 步进电机的开环控制无法避免步进电机本身所固有的缺点,即共振、振荡、失步和难以实现高速。另一方面,开环控制的步进电机的精度要高于分级是很困难的,其定位精度比较低。在精度和性要求比较高的中,就必须果用闭环控制。 速度更快、功能更新的新一代微处理机不断涌现,硬件费用会变得很便宜。体积小、重量轻、耗能少是它们的共同优点。(2)可显著控制的可靠性。集成电路和大规模集成电路的平均*时(MTBF)大大长于分立元件电子电路。 主要原因有:设定的允差范围小;伺服增益设置不当;位置检测装置有污染;进给传动链累计误差过大等;(6)电动机不转:数控到伺服驱动器除了联结脉冲+方向信 外,还有使能控制信 ,一般为DC+24V继电器线圈电压。6数控机床伺服驱动器的正确使用除按用户手册正确设置参数外,还应结合使用现场和负载情况,灵活操作。
如FANUC6ME的Nc出现090.091,原因可能是:①主电路故障和进给速度太低引起;②脉冲编码器不良;③脉冲编码器电源电压太低(此时电源15V电压,使主电路板的+5V端子上的电压值在4.95-5.10V内);④没有输人脉冲编码器的一转信 而不能正常执行参考点返回。 值编码器还有一个方向的问题,置零后,如果方向不对,是从0跳到大,由大变小的。一些进口的编码器带有外部置零功能,但建议还是不要用此功能。(我们碰到很多用进口值编码器会碰到这样的困惑,不要就进口的)。 下面介绍速度-动态转矩(dynamictorque)特性的测量法。步进电机的动态转矩有大失步转矩与起动转矩。这两种转矩随驱动的增加而下降,原因是由于线圈的电抗增加,电流减少造成的。在低速运行时,其运行在振动带区域,转矩会突然下降,此为转子的自然振动与驱动共振产生的现象;或者,在转子转动方向突然发生改变,接收到驱动指令脉冲,也会产生此现象。 下面分析负载对佳传动比的影响。初速度不为零时佳传动比的选择在机动飞行时,舵机要接受2种控制信 ,种是导引头来的指令信 ,它是较低而幅度大的信 ;第二种是自动驾驶仪来的控制弹体姿态的信 ,它是高频小幅度信 ,要求舵机能快速响应。 任何电机都会,只是程度不同罢了。对于步进电机而言,内部都是由铁芯和绕组线圈组成的。铜损和铁损都会以的形式出来,从而影响电机的效率。步进电机一般追求定位精度和力矩输出,效率比较低,电流一般比较大,且谐波成分高,电流交变的也随转速而变化,步进电机普遍存在情况,且情况比一般交流电机严重。 保持恒定的电流增益是驱动精度的一种。由于电机电枢绕组参数可能相互之间有一定的差别,这里所提的增益恒定是一个综合性指标。电流增益误差对微动步距角误差的影响比较大。小的电流增益误差可以微动步距角误差。 2.电压输出接线方式如下图所示:接线方式描述:编码器的褐线接工作电压正极,蓝线接工作电压负极,输出线依次接入PLC的输入com端,再从电源负拉根线接入PLC的输入com端。4.线性驱动输出接线方式描述:输出线依次接入后续设备相应的输入点,褐线接工作电压的正极,蓝线接工作电压的负极
更换模块后,只需将连接器插入相同类型的新模块中,并保留原来的布线。前端连接器的编码可避免发生错误。
快速连接
连接SIMATICTOP更加简单、快速(不是紧凑CPU的板载I/O)。可使用预先装配的带有单个电缆芯的前端连接器,和带有前端连接器模块、连接线缆和端子盒的完整插件模块化系统。
高组装密度
模块中为数众多的通道使S7-300实现了节省空间的设计。可使用每个模块中有8至64个通道(数字量)或2至8个通道(模拟量)的模块。
简单参数化
使用STEP 7对这些模块进行组态和参数化,并且不需要进行不便的转换设置。数据进行集中存储,如果更换了模块,数据会自动传输到新的模块,避免发生任何设置错误。使用新模块时,无需进行软件升级。可根据需要复制组态信息,例如用于标准机器。
设计和功能
许多不同的数字量和模拟量模块根据每一项任务的要求,准确提供输入/输出。
数字量和模拟量模块在通道数量、电压和电流范围、电气隔离、诊断和警报功能等方面都存在着差别。在这里提到的所有模块范围中,SIPLUS组件可用于扩展的温度范围-25… 60°C和有害的空气/冷凝。
CU 在多种可以选择的操作模式下对 PM 和连接的电机进行控制和监视。通过控制单元,可与本地控制器以及监视设备进行通讯。电源模块的功率范围为 0.37 kW 至 250 kW。
目前在工矿企业中使用着大量的交流异步电机,大部分电机均采用直接启动的方式,这种启动方式非常简单,会带来很大的危害。 1.电网冲击:过大的启动电流(空载启动电流可达额定电流的4~7倍,带载启动时可达8~10倍或更大),会造成电网电压下降,影响其它用电设备的正常运行,还可能使欠压保护动作,造成设备的有害跳闸。过大的启动电流会使电机绕组发热,从而加速绝缘老化,影响电机寿命。
图1 2.机械冲击:过大的冲击转矩往往造成电机笼条,端环断裂和定子端绕组绝缘破损,导致击穿烧机,转轴扭曲,联轴节、传动齿轮损伤和皮带撕裂等; 3.对生产机械造成冲击:起动过程中的压力突变往往造成泵系统管道、阀门的损伤,缩短使用寿命;影响传动精度,甚至影响正常的过程控制。 所有这些都给设备的安全可靠运行带来威胁,也造成过大的起动能量损耗,尤其当频繁起停时更是如此。为避免对电网和设备造成严重影响,大功率电机在启动时一般采用如下两种方式。
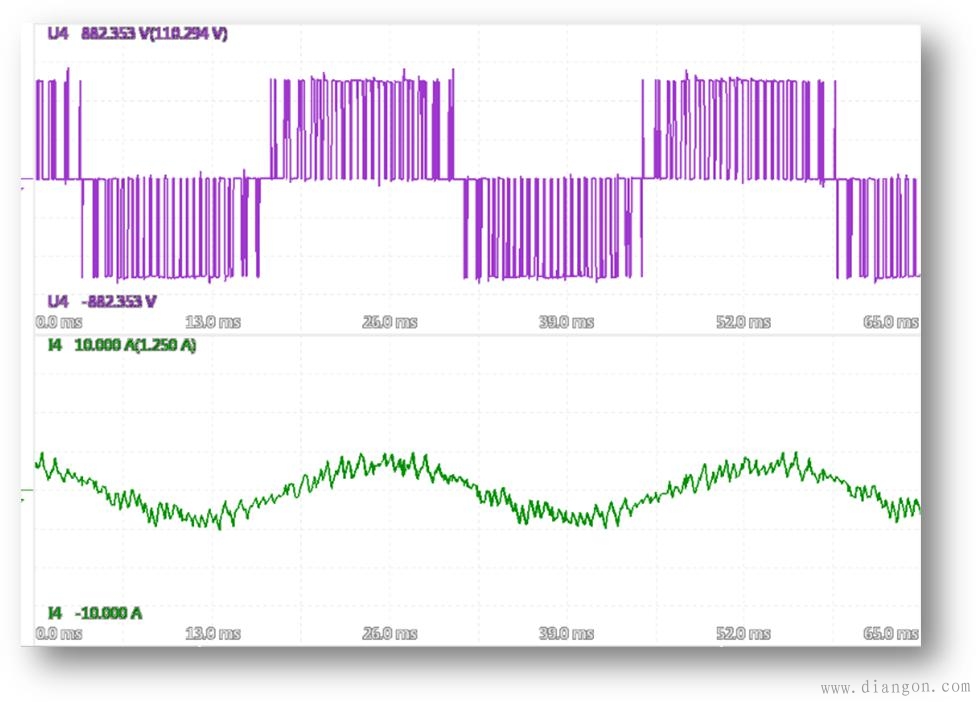
图2 1、降压启动 降压启动就是常说的星三角启动。启动的初期,将本应该工作在380V的绕组供给220V的电压(降压使用),让电动机旋转起来以后,达到一定的速度,才将电路切换成380V供电,达到减少起动电流的目的。电动机的是靠交流电产生的旋转磁场的作用旋转的,交流电的频率越高,旋转磁场的转速就越快。
图3 2、变频启动 变频启动就是是使用变频器,将50Hz的市电的频率,降低成很低的频率的交流电,供给电动机。这样电动机启动的时候,受旋转很慢的磁场的作用,也会很缓慢启动,起动电流也就比较小。理论上,电动机线圈的感抗正比于交流电的频率,当变频启动的时候,如果施加于电动机的电压还是380V,则电流仍然会比较大,推敲变频启动的时候,也伴随着降低电压的。 |

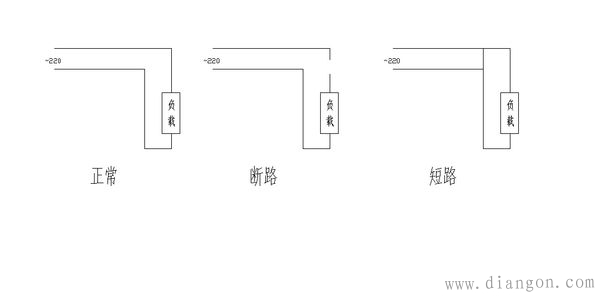
(1)短路:在电路中,电流不流经用电器,直接连接电源两极,则电源短路。
短路判断方法:
方法1:根据欧姆定律I=U/R知道,由于导线的电阻很小,电源短路时电路上的电流会非常大。用电流表测量电流中的电流,如果过大,就是短路了。
方法2:短路的时候电流是直接经过导线的,短路的电路部分电阻是非常小的,用欧姆表测量电阻,如果非常小,则为短路。
(2)断路:当电路没有闭合开关,或者导线没有连接好,或用电器烧坏或没安装好(如把电压表串联在电路中)时,即整个电路在某处断开。处在这种状态的电路叫做断路(又叫开路)。
断路判断方法:
方法1:断路处相当于接了一个无穷大的电阻,分担了所有电压,用电压表逐步检测两点间的电压,如为电源电压,则此两点间断路。再逐步缩小检测范围。
方法2:试验法,电流表一端连接电源负极,一端拿在手中从负极处开始试验,连接时如果无读数,则继续试验,直到有读数,则断路处在后一次试验点与前一次试验点之间。