6ES7212-1HE40-0XB0现货供应
直流伺服和交流伺服相似,可以采用控制器开环控制方式,控制器半闭环控制和全闭环控制系统。
直流伺服系统控制面板结构如下,面板右侧为与直流接口板的接口,包括电机驱动接口和编码器接口;左侧为与运动控制器面板的接口,包括位置控制模式接口和速度控制模式接口。

m+,m-信号为直流无刷伺服电机的线,用于驱动电机的运动。
a+,a-,b+,b-,c+,c-,5+,0v信号为编码器信号,用于反馈电机轴的实际位置。
a,/a,b,/b,c,/c,+5v,pul+,dir+,ognd,ovcc,gnd,dac,reset,alm,enable为与控制器相连的控制信号。
其含义为:
a,/a,b,/b,c,/c为驱动器反馈给运动器控制器的编码器信号。
+5v为电源。
pul+,pul-为脉冲信号,用于位置模式下的电机控制。
dir+,dir-为方向信号,用于位置模式下的电机控制。
ognd,ovcc,gnd分别为模拟地,模拟电源和数字地。
dac为驱动器接受的模拟控制信号,范围一般为-10v-10v。
reset,alm,enable为控制信号,分别表示驱动器的复位,报警以及使能功能。
直流伺服驱动器通常具有速度控制模式和位置控制模式。
采用位置模式时,输入控制信号为脉冲和方向(或是正负脉冲),采用速度模式时,输入控制信号为模拟量。驱动器将输入信号转化为速度控制信号,经过速度控制器转化为电流控制信号,电流信号通过pwm回路作用于功率扩大模块的输出模块,后施加给电机。

直流伺服驱动器采用idm只能伺服驱动器。
idm240/640是嵌入式智能、高精密、全数字化的伺服驱动器,可驱动方波或正弦波无刷伺服电机(pmsm),直流有伺服电机,通过can或rs-485接口可组成多达256个轴的分布式智能网络运动系统,嵌入的可编程运动语言(tml)提供各种运动控制和专用功能。
主要特点如下 :
分布式智能,单轴主控运行或从动轴模式
控制模式:位置,速度,转矩,电压,外部变量
运动模式:脉冲+方向,齿轮,profiling,contouring
可编程保护:位置误差,过流,过压或欠压,i2t,
dsp控制技术:基于motionchiptm 技术
rs232/485串行接口,波特率可达115kb
can2.0局域总线,兼容canopen,波特率可达1mhz
输出电流:连续电流5a/8a,峰值电流16a,
电源电压:12-48vdc(idm240) ,12-48vdc(逻辑电源)/80v(电机)(idm640)
紧凑结构设计:136 x 84.5 x 26 mm
控制软件采用easy motion studio,控制软件特点如下:
图形化评估分析编程工具easymotion studio平台快速设置电机、驱动器参数及编程运动程序,tml_lib函数库是智能化伺服驱动器在 pc上执行运动控制应用的一个函数库,在c/c++、basic、delphi、labview开发的应用程序中调用库中的.dll文件执行后,能直接与驱动器通信、设置参数、查询状态、传送命令、定义运动事件,测试输入输出口状态等。
starter kit for idm640:包含驱动器的完整组件,包括一个idm640驱动器,一个电机,一个i/o板,easymotion studio软件,以及应用程序的帮助和完整文件。是测试您的运动控制程序的理想实验平台。如上所述均包含在一个可立即运行、即插即用的组件中。

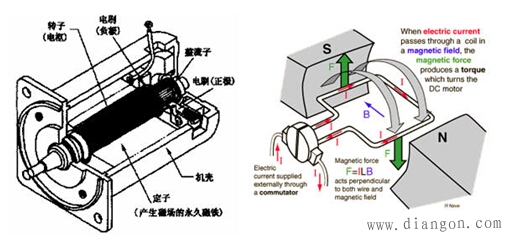
直流伺服电机包括如下组成部分:
定子:磁场—永磁体
转子:电枢绕组
换向:换向器与碳刷
加于直流电机的直流电源,借助于换向器和电刷的作用,使直流电机电枢线圈流过的电流,方向是交变的,从而使电枢产生的电磁转矩的方向恒定不变,确保直流电动朝确定的方向连续旋转。
直流伺服优点:
· **的速度控制
· 转矩速度特性很硬
· 原理简单、使用方便
· 价格优势
缺点:
· 电刷换向
· 速度限制
· 附加阻力
· 产生磨损微粒(对于无尘室)
步进驱动器选型指南:
驱动器的电流:电流是判断驱动器驱动能力大小的依据,通常驱动器大额定电流不能大于电机的额定电流。驱动器输出电流设定决定电机的力矩,电流设定值越大时,电机输出力矩越大,但电流设定过大时电机和驱动器的发热也比较严重。通常的设定方式采用额定电流值作为参考、但实际应用中的佳值应在些基础上调整。驱动器的电流主要规格有:2.0a、3.0a、4.0a、6.0a、8.0a等。
驱动器的供电电压:驱动器的输入电压的高低决定电机的高速性能。供电电压越高,电机高速时力矩越大,越能避免高速进失步。但电压过高会导致驱动器过压保护,电机发热较多,可能导致驱动器损坏。在高压下工作时,电机低速运动的振动会大一些。常规输入电压有 24vdc,48vdc等。
驱动器的细分:步进电机驱动器的工作模式有整步、半步、细分,主要区别在于电机线圈电流的控制精度。通常步进电机都有低频振动的特点,通过细分设置可以改善电机低速运行的平稳性。
目前,国内经济型步进驱动电路主要有以下几种:
1.单电压限流型驱动电路
单电压限流型驱动电路是步进电动机一相的驱动电路,l是电动机绕组,晶体管vt可以认为是一个无触点开关,它的理想工作状态应使电流流过绕组l的波形尽可能接近矩形波。由于电感线圈中的电流指数规律上升,其时间常数 ,须经过 的时间后才能达到稳态电流。
v在晶体管vt截止时起续流和保护作用,以防止晶体管截止瞬间绕组产生的反电势造成管子击穿,串联电阻rd使电流下降更快,从而使绕组电流波形后沿变陡。
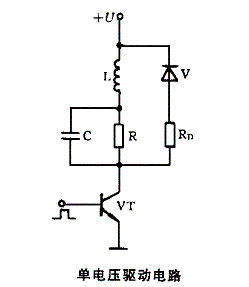
由于步进电动机绕组本身的电阻很小,时间常数很大,从而严重影响电动机的启动频率。为了减小时间常数,在励磁绕组中串以电阻r,这样时间常数 就大大减小,缩短了绕组中电流上升的过度过程,从而提高了工作速度。
在电阻r两端并联c,是由于电容上的电压不能突变,在绕组由截止到导通的瞬间,电压全部降落在绕组上,使电流上升更快,电容c又称为加速电容。
这种电路的缺点是r上有功率消耗。为了提高快速性,需加大r的阻值,随着阻值的加大,电源电压也势必提高,功率消耗也加大,正因为这样,单电压限流型驱动电路的使用受到了限制。
2.高低压切换型驱动电路
优点:功耗小,启动力矩大,突跳频率和工作频率高。
缺点:大功率管的数量要多用一倍,增加了驱动电源。
高低压切换型驱动电路的后一级如图 (a)所示,相应的电压电流波形图如图(b)所示。这种电路中采用高压和低压两种电压供电,一般高压大于60v,低压为5~20v。v1在vt1和vt2都截止时通过电源和v2为电机绕组提供放电回路。在t1-t2时间内。

vt1和vt2均饱和导通,+80v的高压电源经过vt1和vt2管加到步进电动机的绕组上,使其电流迅速上升,当时间到达t2时,或电流上升到某一数值时,ub2变为低电平,vt2截止,电动机绕组的电流由+12v电源经过vt1管来维持。
此时,电流下降到电动机的额定电流,直到t3时ub1也为低电平,vt1管截止,电动机绕组电流下降到0。一般电压ub1由脉冲分配经过几级放大获得,电压ub2由单稳定时或定流装置再经脉冲变压器获得。
3.pwm 型驱动电路
恒频脉宽调制功放电路基本上是把斩波恒流和斩波平滑功放电路的特点集于一身,功能更好。v1是20khz的方波,它作为各相d触发器的时钟信号cp,以保证各相以同样的频率进行斩波。v2是步进控制信号。
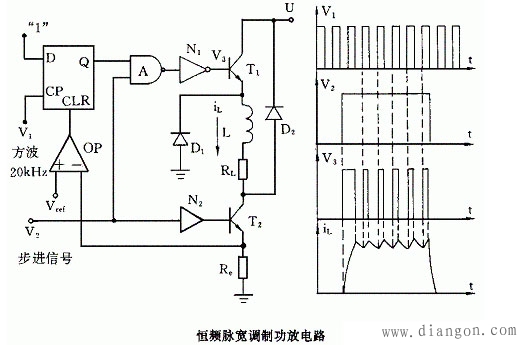
vref是比较器op的正输入端信号,它用于确定电机绕组电流il 的稳定值。恒频脉宽调制功率放大电路不但有较好高频特性,有效地减少了的噪声,还降低了功耗。体积也可以减少。由于斩波的频率较高,对功放管的要求也稍高。而这种电路的低频振荡也较高。
步进电动机的驱动电路实际上是一种脉冲放大电路,使脉冲具有一定的功率驱动能力。由于功率放大器的输出直接驱动电动机绕组,功率放大电路的性能对步进电动机的运行性能影响很大。对驱动电路要求的核心问题则是如何提高步进电动机的快速性和平稳性