西门子模块6ES7215-1HF40-0XB0型号规格
一、跳步与循环
复杂的控制系统不仅I/O点数多,功能表图也相当复杂,除包括前面介绍的功能表图的基本结构外,还包括跳步与循环控制,系统往往还要求设置多种工作方式,如手动和自动(包括连续、单周期、单步等)工作方式。手动程序比较简单,一般用经验法设计,自动程序的设计一般用顺序控制设计法。
1.跳步
如图1所示用状态器来代表各步,当步S31是活动步,并且X5变为“1"时,将跳过步S32,由步S31进展到步S33。这种跳步与S31![]() S32
S32![]() S33等组成的“主序列"中有向连线的方向相同,称为正向跳步。当步S34是活动步,并且转换条件
S33等组成的“主序列"中有向连线的方向相同,称为正向跳步。当步S34是活动步,并且转换条件![]() 时,将从步S34返回到步S33,这种跳步与“主序列"中有向连线的方向称为逆向跳步。显然,跳步属于选择序列的一种特殊情况。
时,将从步S34返回到步S33,这种跳步与“主序列"中有向连线的方向称为逆向跳步。显然,跳步属于选择序列的一种特殊情况。

图1 含有跳步和循环的功能表图
2.循环
在设计梯形图程序时,经常遇到一些需要多次重复的操作,如果一次一次地编程,显然是非常繁琐的。我们常常采用循环的方式来设计功能表图和梯形图,如图1所示,假设要求重复执行10次由步S33和步S34组成的工艺过程,用C0控制循环次数,它的设定值等于循环次数10。每执行一次循环,在步S34中使C0的当前值减1,这一操作是将S34的常开触点接在C0的计数脉冲输入端来实现的,当步S34变为活动步时,S34的常开触点由断开变为接通,使C0的当前值减1。每次执行循环的后一步,都根据C0的当前值是否为零来判别是否应结束循环,图中用步S34之后选择序列的分支来实现的。假设X4为“1",如果循环未结束,C0的常闭触点闭合,转换条件![]() 满足并返回步S33;当C0的当前值减为0,其常开触点接通,转换条件
满足并返回步S33;当C0的当前值减为0,其常开触点接通,转换条件![]() 满足,将由步S34进展到步S35。
满足,将由步S34进展到步S35。
在循环程序执行之前或执行完后,应将控制循环的计数器复位,才能保证下次循环时循环计数。复位操作应放在循环之外,图1中计数器复位在步S0和步S25显然比较方便。
二、选择序列和并行序列的编程
循环和跳步都属于选择序列的特殊情况。对选择序列和并行序列编程的关键在于对它们的分支和合并的处理,转换实现的基本规则是设计复杂系统梯形图的基本准则。与单序列不同的是,在选择序列和并行序列的分支、合并处,某一步或某一转换可能有几个前级步或几个后续步,在编程时应注意这个问题。
1.选择序列的编程
(1)使用STL指令的编程
如图2所示,步S0之后有一个选择序列的分支,当步S0是活动步,且转换条件X0为“1"时,将执行左边的序列,如果转换条件X3为“1"状态,将执行右边的序列。步S32之前有一个由两条支路组成的选择序列的合并,当S31为活动步,转换条件X1得到满足,或者S33为活动步,转换条件X4得到满足,都将使步S32变为活动步,系统程序使原来的活动步变为不活动步。

图2 选择序列的功能表图一
如图3所示为对图2采用STL指令编写的梯形图,对于选择序列的分支,步S0之后的转换条件为X0和X3,可能分别进展到步S31和S33,在S0的STL触点开始的电路块中,有分别由X0和X3作为置位条件的两条支路。对于选择序列的合并,由S31和S33的STL触点驱动的电路块中的转换目标均为S32。

图3 选择序列的梯形图一
在设计梯形图时,其实没有必要特别留意选择序列的如何处理,只要正确地确定每一步的转换条件和转换目标即可。
(2)使用通用指令的编程
如图5所示对图4功能表图使用通用指令编写的梯形图,对于选择序列的分支,当后续步M301或M303变为活动步时,都应使M300变为不活动步,应将M301和M303的常闭触点与M300线圈串联。对于选择序列的合并,当步M301为活动步,并且转换条件X1满足,或者步M303为活动步,并且转换条件X4满足,步M302都应变为活动步,M302的起动条件应为:![]() ,对应的起动电路由两条并联支路组成,每条支路分别由M301、X1和M303、X4的常开触点串联而成。
,对应的起动电路由两条并联支路组成,每条支路分别由M301、X1和M303、X4的常开触点串联而成。

图4 选择序列功能表图二

新力川伺服电机 / 威纶触摸屏TP6071IP / QD70P8模块/QY42P
通讯线TK-Q 编程线USB-QC30R2
1、伺服电机接线
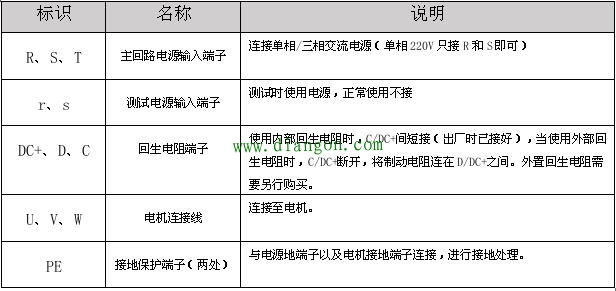
(1) 驱动器主电路端子名称
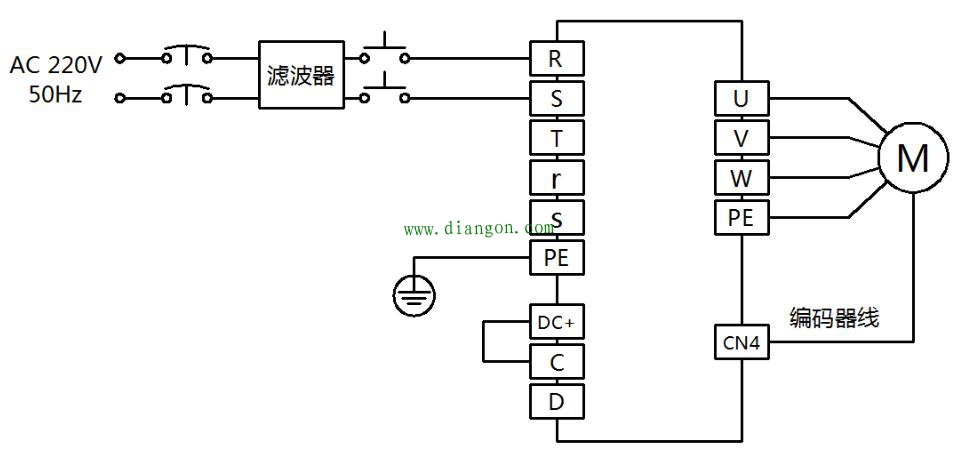
(2)电源接线方式(有单相,三相,这里采用单相)
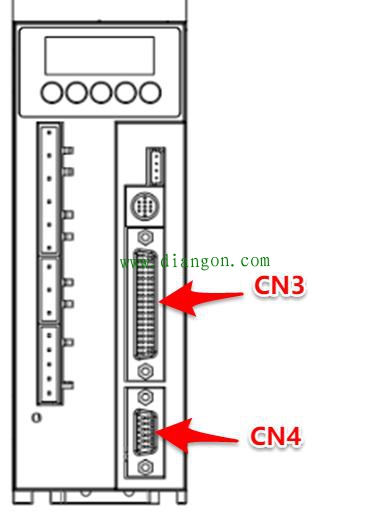
(3)伺服驱动器面板
(4)位置控制模式接线
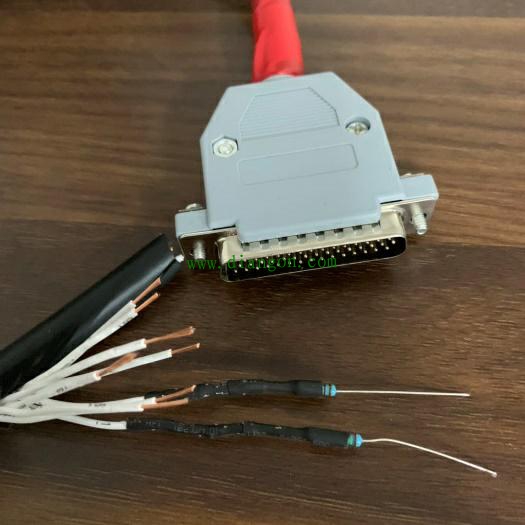
CN3端子

CN3端子定义
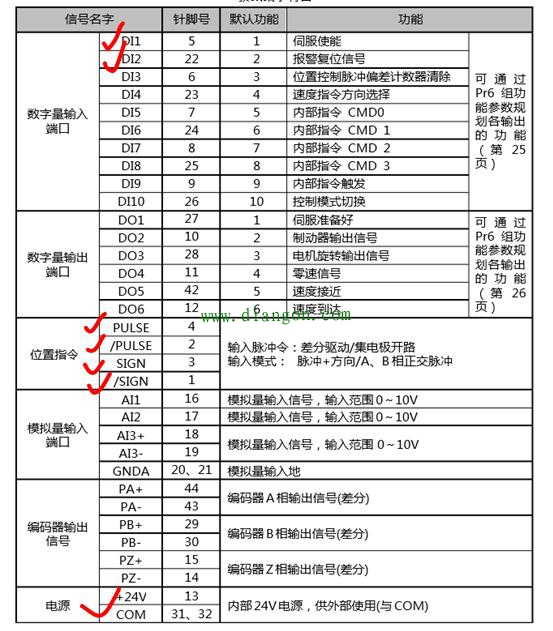
位置控制所需的控制端子如上图所示,针脚号1、针脚号2需要接100Ω电阻。

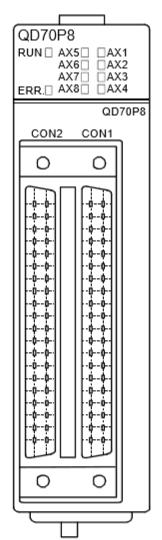
三菱QD70P8模块端子定义

伺服驱动器与三菱plc接线

注:引脚5和引脚22接输出Y,可以根据自己实际需要更改输出端子
PLC参数设置
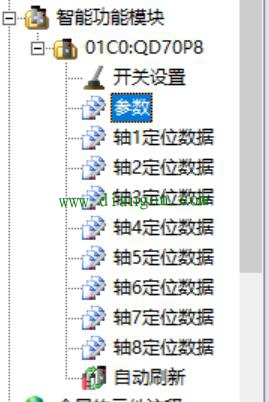
轴1定位数据:选择定位结束,INC就是相对位置控制,其他参数可以根据自己需要设置,这里可以默认。

参数设置:一般直接默认设置就可以。

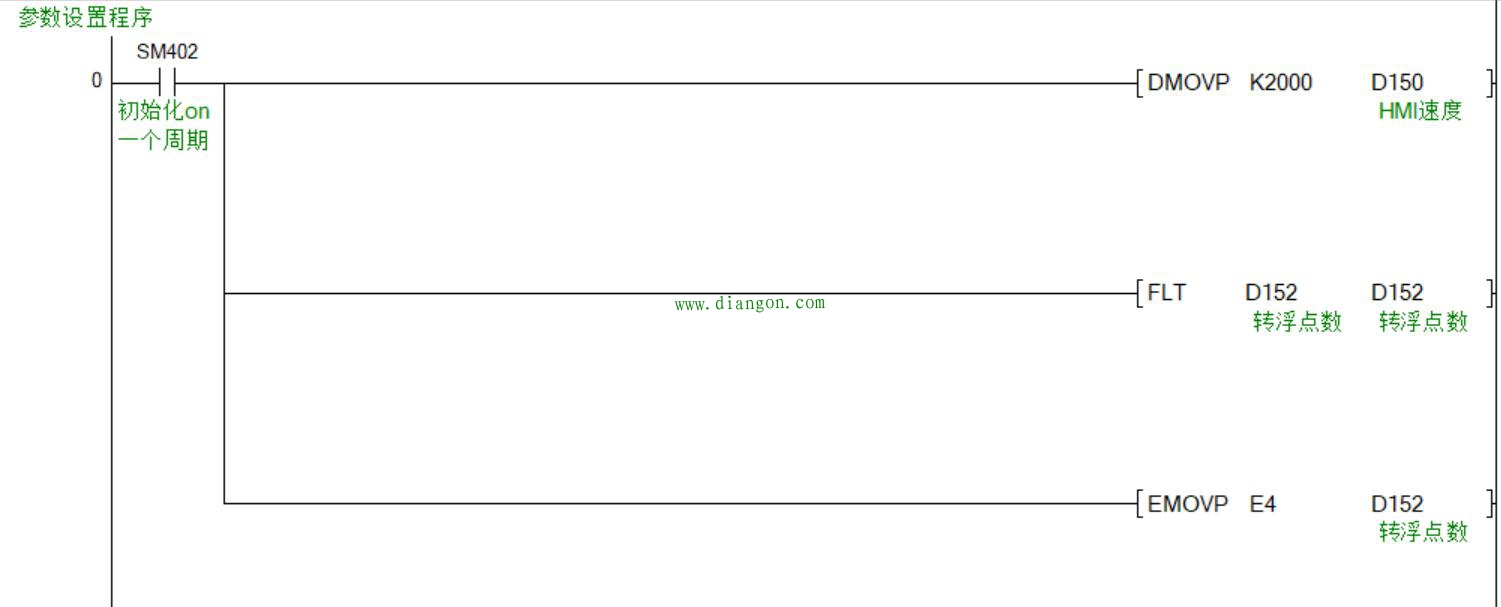
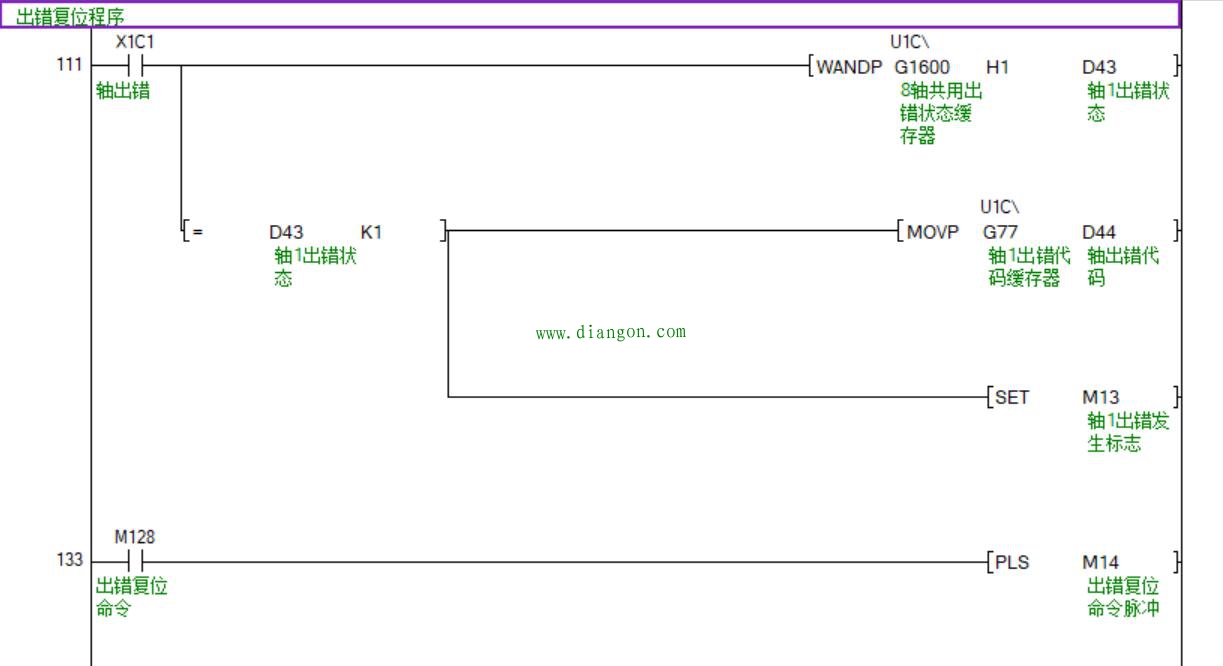
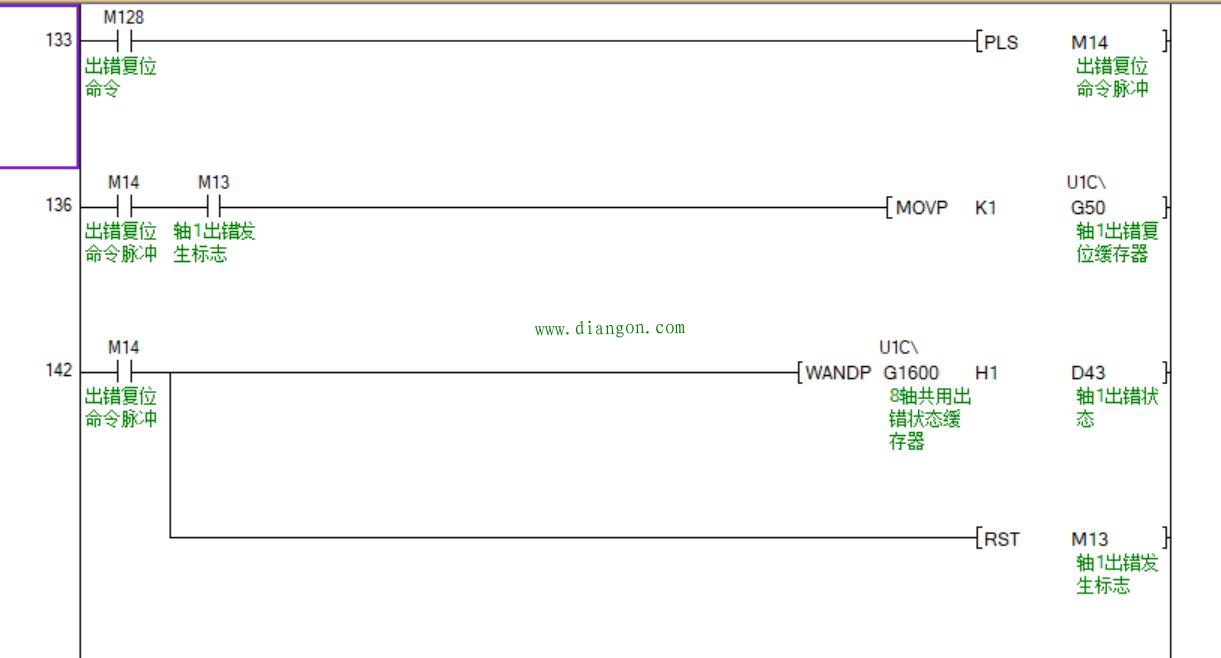
2、PLC程序
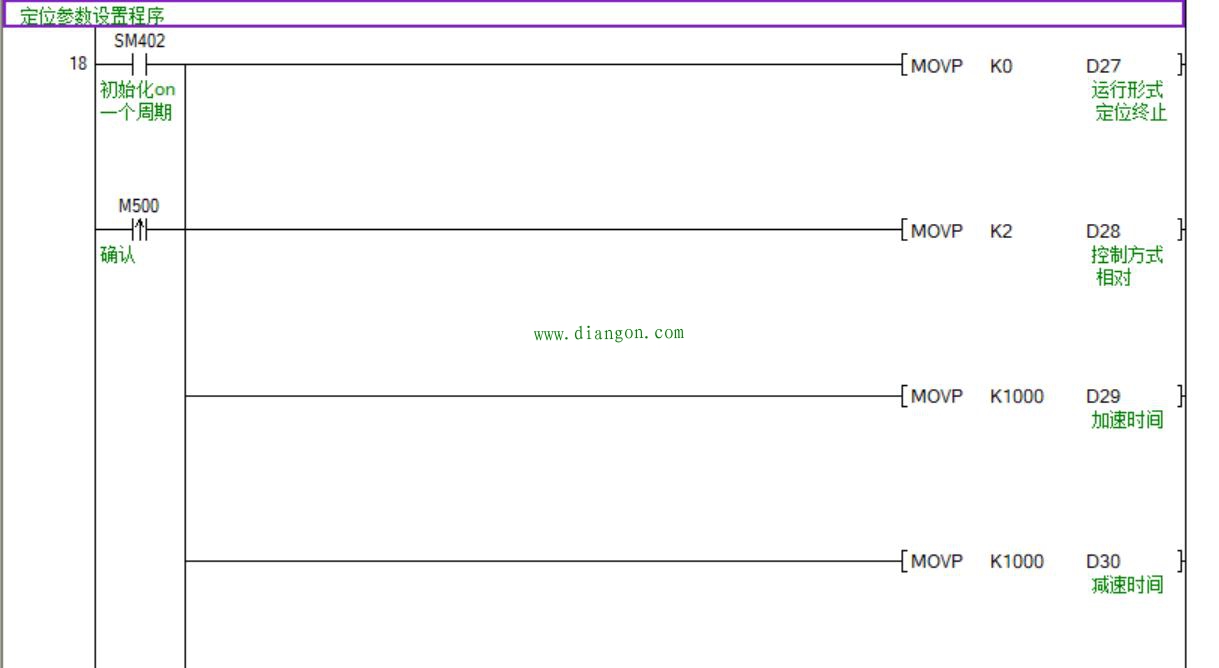
初始化设置先设置速度为2000,后面在人机界面可以自己调整
脉冲数转换:电机走一圈用的模组走5mm的距离
电机走一圈脉冲10000pulse,人机界面输入1mm,需要2000脉冲,距离是浮点数,需要用到浮点数相关指令。
ü FLT D152 D152将整型D152转换为浮点数
ü EMOVP E4 D152浮点数赋值
ü E* D152 E2000 D154 浮点数相乘
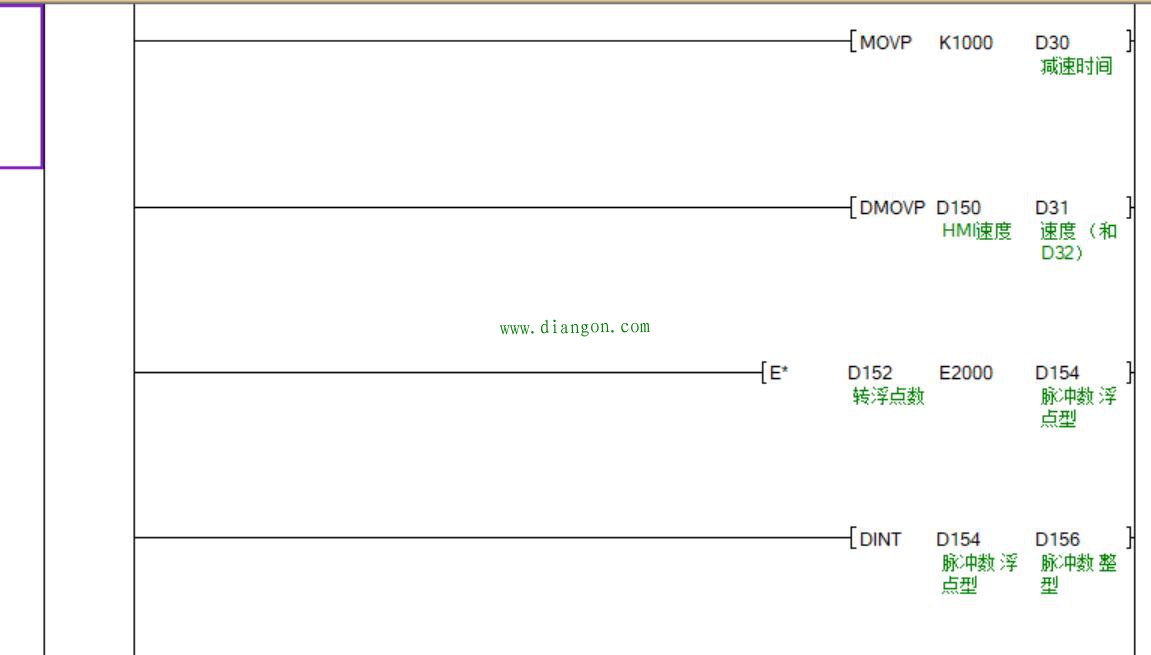
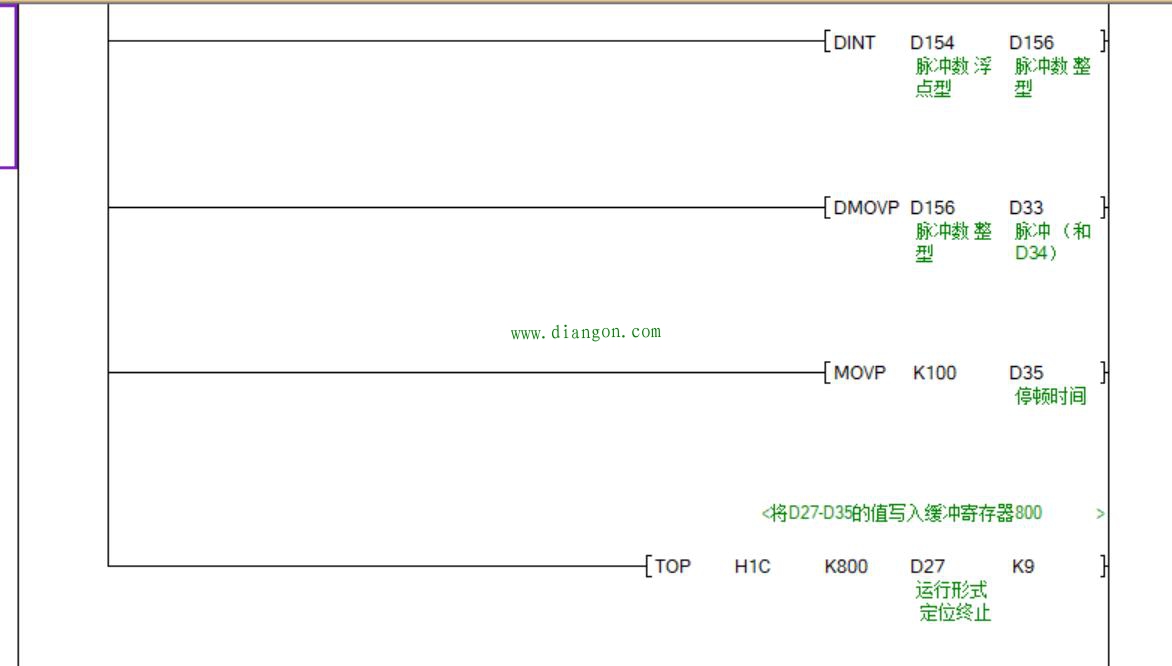
ü DINT D154 D156浮点数转为D156
ü TOP H1C K800 D27 K9
将D27开始的9个数据寄存器的数值存入模块的缓冲寄存器中,当模块安装在基板槽口0时,则选择H00,我是安装在第8槽口,输入输出从X1C0,Y1C0开始,为H1C,K800是轴1的缓冲数据寄存器,轴2为k900,以此类推,可接8个轴。
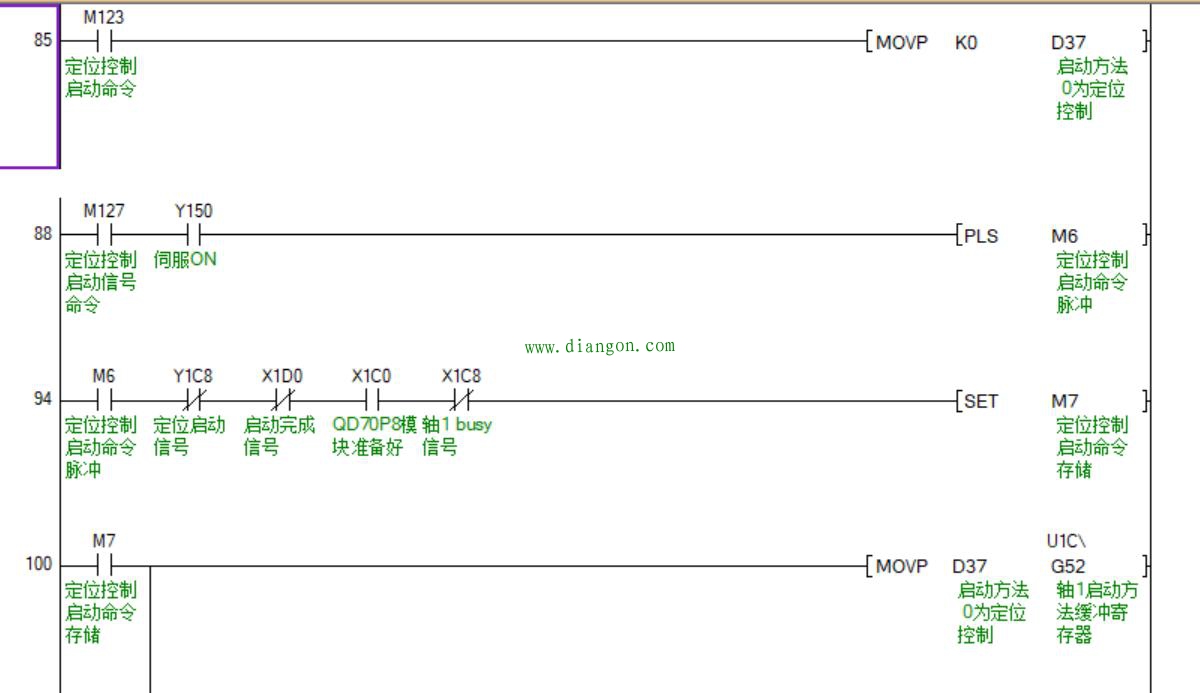

注意:程序中,运行形式和控制方式一定要写入,否则将报错。定位形式0,控制形式为2。

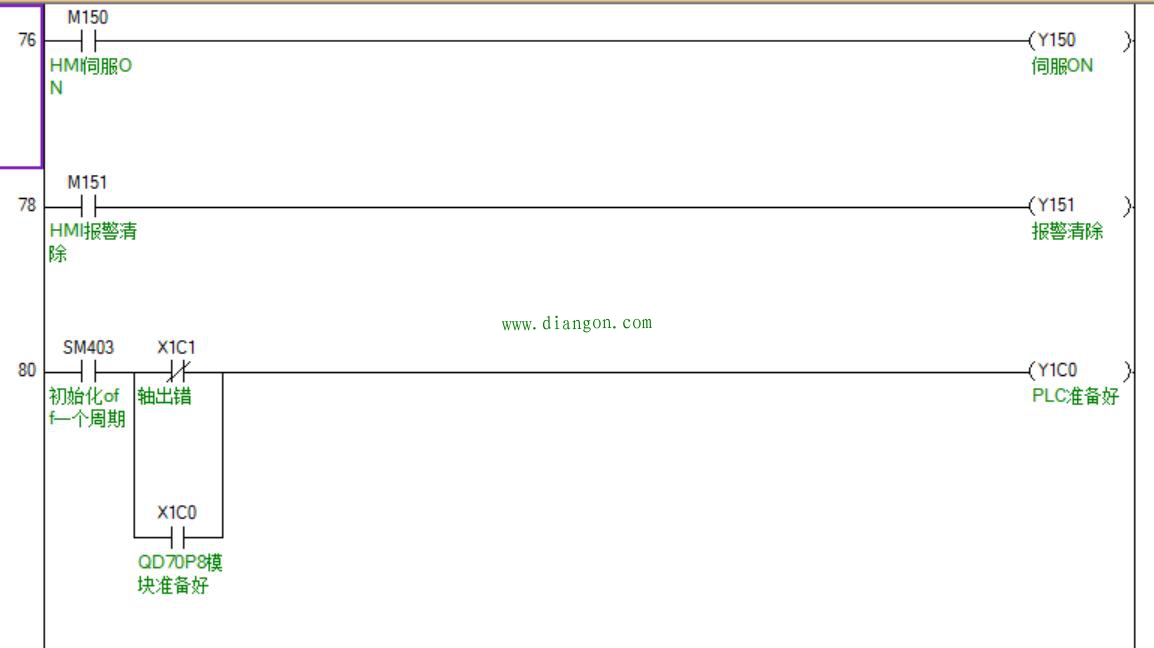
3、hmi对应程序
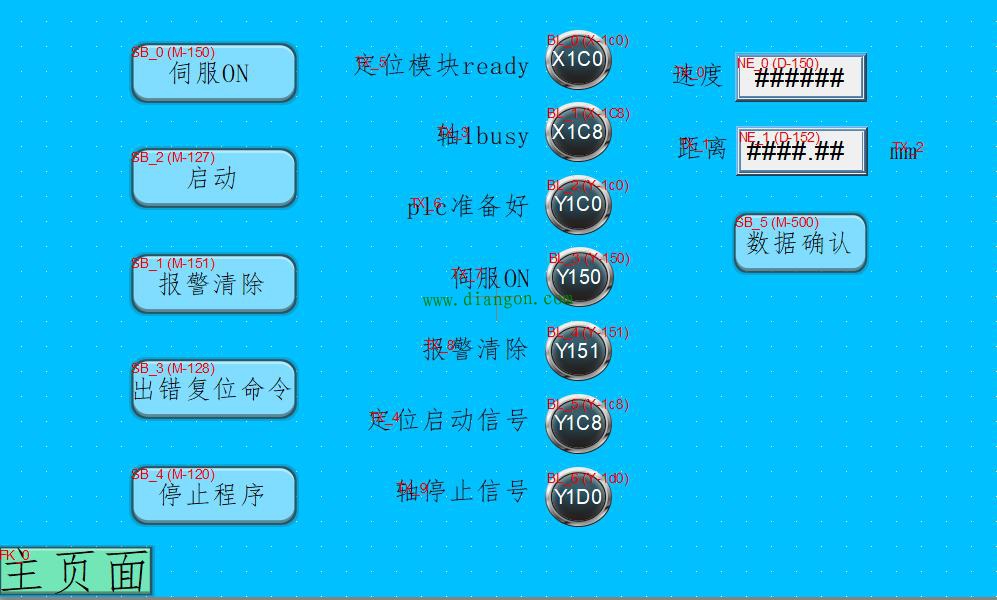
工作过程:在速度、距离中输入数据,电机数据确认按钮,开启伺服ON按钮,锁住电机,再按下启动按钮,电机将按照设定的距离和速度动作。当电机出错,查找原因并按下报警清除按钮,清除报警