设计CU310-2控制单元标配有以下接头和接口:现场总线接口CU310?2PN:1个PROFINET接口,带有PROFIdriveV4配置文件的2个端口(RJ45插座)CU310?2DP:1个采用PROFIdriveV4行规的PROFIBUS接口1个用于与DRIVE-CLiQ电机或其它DRIVE-CliQ设备(如编码器单元或端子模块)通信的DRIVE-CLiQ接口1编码器分析功能,用于分析以下编码器信号增量式编码器TTL/HTLSSI编码器,无增量信号1个PE(保护用地线)连接1个电子装置电源接口,通过24VDC电源连接器连接1点温度传感器输入(KTY84?130或PTC)3个可设置参数的故障(可与固件V4.5或更高版本结合使用)数字量输入(隔离)或6个可设置参数的数字量输入(隔离。
除了极为灵活的定位功能,由于其一体化的监控和补偿功能,Epo还具有高度的用户友好性和灵活性。各种不同的操作模式及其功能增强了灵活性和设备生产率,例如,通过“运行中快速"和无扰地校正运动控制。预组态的PROFIdrive定位框可供使用,一旦选择此定位框,其可以自动建立到基本定位器的内部“连接"。Epo基本定位器的功能借助以下基本组件实现闭环位置控制位置实值感测(包括低级别测量探头评估和基准标记搜索)位置控制器(包括限值、适配和预控计算)监控功能(停止、定位和动态跟踪误差监控,和凸轮信号)机械系统反向间隙补偿模数偏移量极限值速度/加速度/延迟/冲击限制软件限位开关(通过位置设定点评估进行行程限制)停止凸轮(使用硬限位开关分析进行移动范围限制)参考或调整设定参考点(对于处于静止的轴)搜索基准(单个模式包括反向能、自动换向、归位至“输出凸轮和编码器零点标号"或只是“编码器零点标号"或“外部零点标号(BERO)")捕捉参考(借助于测量输入分。
CU310?2控制单元需要装有V4.4版或更高版本的固件的CF卡。CU310?2PN控制单元使用PROFINETIO和PROFIdriveV4配置文件与更别的控制系统通信。带有CU310?2PN的SINAMICSS120驱动系统假设PROFINETIO设备的功能,可执行下列功能:PROFINETIO设备100Mbit/s全双工通讯支持实时PROFINETIO:RT(实时)IRT(等时同步实时),*小发随着人力资源的匮乏,非标自动化机械在未来的市场将不断扩大,普及。相应的从事行业内的人才也将有大的需求。设计是理论知识,生产上不要求多美观,实用就好,宗旨是简单,,经济,实用。作为的设计师,对机械方案的评估要有*的判断能。
除驱动对象外,还可在这些控制单元上实现工艺对象。可将这些对象进行分组以形成工艺功能包,并提供扩展的运动控制功能(如同步操作、凸、路径插补等)或工艺功能(如凸轮控制器、温度或压力控制)。SIMOTIOND中集成有符合IEC61131-3的PLC,这意味着该系统不仅能够控制运动序列,还可控制包括HMI及I/O的整台机器。的开环和闭环控制功能与驱动对象相关的输入和输出变量的时间特性可通过集成的轨迹功能进行测量,并通过STARTER调试工具进行显示。轨迹可记录*多4个信号。一个记录可通过自由选择边界条件来触发,例如,通过一个输入或输出变量的值来触发。基本定位器功能模块(EPos)基本定位器“Epos"可作为一个激活的功能模块在所有SINAMICSS120控制单元上调
基本定位器可用于解决基本运动控制任务,无需使用一个外部控制器。集成功能,用于带电机编码器或机器编码器的直线和旋转轴的及相对定位。SINAMICSS120驱动系统中的Epo基本定位器提供了强大、的定位功能。由于其灵活性和自适应性,基本定位器可用于一系列定位任务中。这些功能无论是在调试还是操作时都易于处理,并且综合监控功能十。在不使用外部位置控制器的情况下,可以实现许多应用。Epo基本定位器用于在/相对定位条件下定位带有旋转以及线性电机编码器或机器编码器(间接或直接测量系统)的线性或旋转轴(模数)。Epo是一个功能模块,其可在伺服控制或向量控制中激活。用户友好的组态和调试,包括控制面板(通过PC操作)和带有STARTER调试工具的诊断功。
理的结构型式PLC主要有整体式和模块式两种结构型式。整体式PLC的每一个I/O点的平均价格比模块式的便宜,且体积相对较小,一般用于系统工艺过程较为固定的小型控制系统中;而模块式PLC的功能扩展灵活方便,在I/O点数、输入点数与输出点数的比例、I/O模块的种类等方面选择余地大,且维修方便,一般于较复杂的控制系统。安装方式的选择PLC系统的安装方式分为集中式、远程I/O式以及多台PLC联网的分布式。集中式不需要设置驱动远程I/O硬件,系统反应快、成本低;远程I/O式适用于大型系统,系统的装置分布范围很广,远程I/O可以分散安装在现场装置附近,连线短,但需要增设驱动器和远程I/O电源;多台PLC联网的分布式适用于多台设备分别独立控制,又要相互联系的场合,可以选用小型PLC,但必须要附加通讯模。
相应的功能要求一般小型(低档)PLC具有逻辑运算、定时、计数等功能,对于只需要开关量控制的设备都可满足。对于以开关量控制为主,带少量模拟量控制的系统,可选用能带A/D和D/A转换单元,具有加减算术运算、数据传送功能的增强型低档PLC。对于控制较复杂,要求实现PID运算、闭环控制、通信联网等功能,可视控制规模大小及复杂程度,选用中档或PLC。中、PLC价格较贵,一般用于大规模过程控制和集散控制系统等场合。响应速度要求PLC是为工业自动化设计的通用控制器,不同档次PLC的响应速度一般都能满足其应用范围内的需要。如果要跨范围使用PLC,或者某些功能或信号有特殊的速度要求时,则应该慎重考虑PLC的响应速度,可选用具有高速I/O处理功能的PLC,或选用具有快速响应模块和中断输入模块的PLC
在下面我们给出了一些例子来演示如何通过操作面板定时器的运行时间和显示定时器的剩余时间。在此条目结尾是实现此条目所描述功能的DEMO项目。1) 可视化操作
2) 控制块功能
3) 下载 1) 可视化操作

图. 01
示例中可以实现以下可视化动作:
选择所需定时器 (1)
TP (产生脉冲)
TON (产生 延时接通)
TOF (产生 延时断开)
监视信号 (2)
绿色: 信号接通
灰色: 信号断开
启动定时器 (3)
如果计数器没有激活可以启动定时器。
复位定时器 (Reset) (4)
复位定时器,恢复定时器到启动之前的初始状态。
即时定时器激活时,也可以复位,此时将中断定时器的计数进程。
预置定时器运行时间(时间单位:毫秒/秒/分钟/小时/天)
只有选择对应的选项域才能接受输入。
通过下拉列表选择时间单位 (5)
持续时间也是 106751 天, 2562047 小时,
153722867 分, 9223372036 秒或 9223372036854 毫秒。
以多种时间单位输入总时间 (6)
的持续时间是 106751 天,23 小时, 47 分, 16 秒 854 毫秒。
过程收到的持续时间 (7)
注释
输入数据类型为“LTIME"的过程值在可视化中显示数据类型为“TIME"。这就是说可显示的范围是 24 天,20 小时,31 分,23 秒 和 647 毫秒或 2147483647 毫秒。如果值更大会显示 #### 。在控制器中正常处理数值并在可视化中正确显示剩余时间。
删除输入输出域 (清除) (8)
手动清除,将持续时间复位为0 (5) (6)。
监视剩余时间
在下拉列表选择时间单位输出时间 (9)
这种输出类型的小数点后位数取决于显示值的小数位数量。
1 数字 > 小数点后3 位数
2 数字 > 小数点后2 位数
3 数字 > 小数点后1 位数
4 数字和更多 > 小数点后没有位数
以多种时间单位输出总时间 (10)
注释
样例中的画面支持所有精智面板和运行版。
使用运行版时,至少需要修改按钮。
使用基本面板,不能控制输入元素的操作,如使用脚本复位预置时间。使用 “可见性" 替换 “控制使能"和 在 “CLEAR"按钮上用VB脚本调用系统命令。
2) 控制块功能
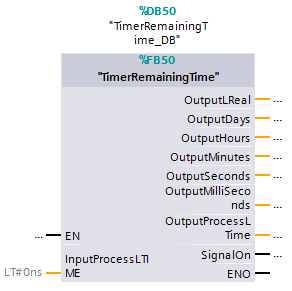
图. 02
控制块FB50 “TimerTimeRemaining"是保持模块。如不需要可以删除
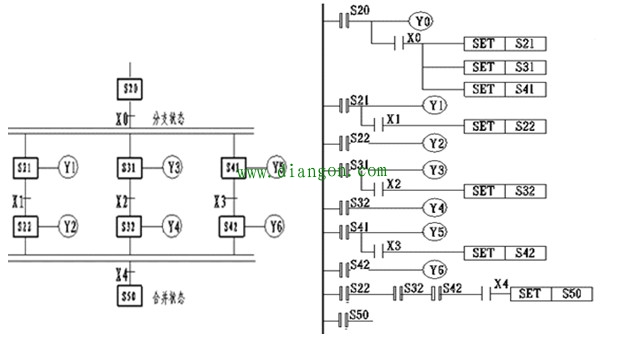
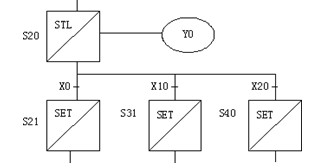
| 1、选择性分支状态转移图 从多个流程顺序中选择执行一个流程,称为选择性分支。图1就是一个选择性分支的状态转移图。
该状态转移图有三个流程图,S20为分支状态 ,根据不同的条件( X0,X10,X20), 选择执行其中一个条件满足的流程。 X0,X10,X20不能为ON,S50为汇合状态,可由S22、S32、S42任一状态驱动。 2、选择性分支、汇合的编程 编程原则是先集中处理分支状态,再集中处理汇合状态。 (1)分支状态的编程 编程方法是**行分支状态的驱动处理,再依顺序进行转移处理。 图1的分支状态S20 见图2
按分支状态的编程方法,对S20进行驱动处理(OUT Y0),按S21、S31、S41的顺序进行转移处理。 (2)汇合状态的编程 编程方法是**行汇合前状态的驱动处理,再依顺序进行向汇合状态的转移处理。 图1的汇合状态及汇合前状态,如图3所示。 按照汇合状态的编程方法,依次将 S21、S31、S32、S41、S42的输出进行处理,按顺序进行从 S22(分支)、S32(第二分支)、S42(第三分支)向S50的转移。
|
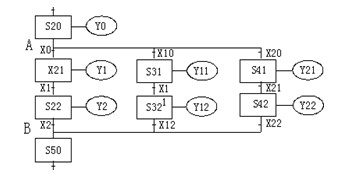
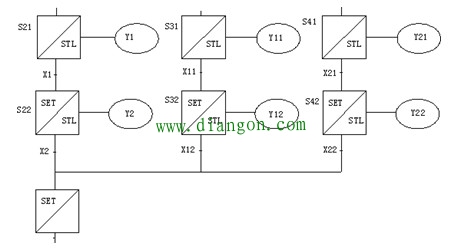
| 1、并行分支结构 并行分支结构是指处理多个程序流程。图中当S20步被激活成为活动步后,若转换条件X0成立就执行左、中、右三支程序。 S50为汇合状态,由S22、S32、S42三个状态共同驱动,当这三个状态都成为活动步且转换条件X4成立时,汇合转换成S50步。 2、并行性分支、汇合的编程 编程原则是先集中处理分支转移情况,依顺序进行各分支程序处理,后集中处理汇合状态,见图所示,根据步近梯形图可以写出指令表程序。
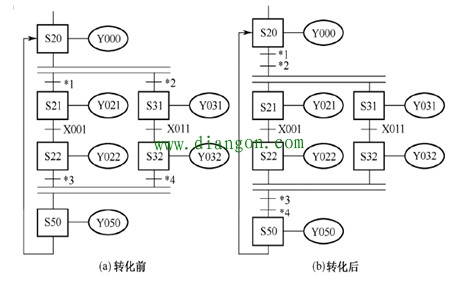
3、并行性分支结构编程的注意事项 (1)并行分支结构的汇合多能实现8个分支的汇合。 (2)在并行分支、汇合处不允许有下图(a)的转移条件,而必须将其转化为下图(b)后,再进行编程。
|