西门子6ES7512-1CK01-0AB0性能参数
中途的张力架动作的补偿、能以图2所示的独特的张力架补偿功能在小变动范围内与以控制。、在变频器中是按三垦独特的卷绕曲线进行计算的、并随着卷绕时间的经过、对卷绕粗度予以补偿。其情况如图3所示。
张力架补偿是随张力架位置而进行的可变增益控制,可对比较缓慢的巻粗现象所引起的变化及加减速时的急剧的变化都予以补偿。卷绕计算曲线具有4套设定、并能以外部输入信号来进行选择。由此、卷绕时间或绕线筒直径发生很大的变化、也能以1条曲线切换信号简便地改变系统。
2.3应用于送线机
在形形色色的卷绕系统的构成中、有时还需要同卷绕側进行动作的送线側的装置(送线机)。本控制法、是此类装置所为合适的送线机对应功能。 而本控制的手法是为抑制微小振动张力架的偏移幅度而进行的盲区控制以及抑制振动现象并能进行高速响应的可变增益控制,这些都在变频器内部予以了增强。同送线机一样由于断线时的DC制动(直流制动)的停止动作,在通线时的反转方向的回卷控制从而形成了廉价的系统构成并提高了其控制性能和作业性能。
3.后记
近几年来变频器应用系统正迅速地趋向特性化,若只是单纯地意识到通用性能的话则就难以满足特性化用户的需求。作为用户来说,现在也更为急切地要求变频器能对各用途市场的迅猛发展的动向逐步予以对应。
本文所记载的对卷绕装置方面的应用、是对应形形色色系统而开发的专用功能的实例。
日益追求技术发展的各种变频器应用系统正在不断地实现专用化,希望本文能为正在致力于变频卷绕控制的用户提供帮助。
是生产扁形电缆为实例的8条独立的送线机构成图。
送线机是同卷绕側的卷绕速度予以联动来作为其基本动作的。但在不能得到卷绕装置而来的速度情报时、联动运转就会成为非常困难的动作。是在这种情况下、本控制也能同卷绕側的速度无关来进行供线。
卷绕側的速度变化、全反映在张力架的动作上、检测此张力架的动作并进行原位控制、为事先预防送线时的过张力及卷绕的松卷现象、来改变旋转方向和转矩。由此动作、即能进行不受卷绕側速度影响的单独的送线机控制。、考虑到断线时的紧急停机、在超越了断线判断电平时、其进行DC制动(直流制动)停止动作。、在进行卷线的准备作业时、若发生过多的送线时、即会在反转方向进行回卷控制。
送线机构成图
2.4应用于卷绕机
从送线筒把线材送到绕线筒的卷绕机方面、会因其线的材质而要求某种恒定的張力和某种恒定的线速度。图6所示的光纤的卷绕装置中、由于使用的是非常容易断线的线材、应以数m~数十m/分的低速来进行恒張力、恒线速度的卷绕。
其特征在于驱动送线部绕线筒的变频器和驱动卷绕部分绕线筒的变频器是互相独立地进行控制的。卷绕側的变频器、是以装置滑車上所设置的PG速度传感器的速度反馈脉冲为依据来进行线速度恒定控制的。送线側的变频器是使用着专用的卷绕功能的、并以张力架的位置检测反馈信号为基准来进行張力的恒定控制的。
也就是说,不使用相互的比率联动信号等、而是以卷绕側变频器的线速度恒定控制为基础、即由送线侧的变频器紧跟卷绕侧的变频器速度来进行張力控制、从而总能保持稳定的卷绕动作。、对予卷绕的中途停机后的再起动、或是改变卷线筒直径时的再起动、都能不受比率联动影响而进行稳定的卷绕动作。
表示卷线筒转速―经过时间的特性。相互控制部分的线速度、从卷绕开始到卷绕结束是始终保持恒速的。为保持此恒定速度、相互的卷线筒的转速、在送线部分是逐渐上升的、而在卷绕部分则是逐渐下降的。
在实现此特性时、特别是供线側的变频器的張力控制是起了很大效果的。通常、为把张力架的位置控制在所希望的位置时,使用PI控制,若增益的设定値不太合适时、就可能会经常发生微小的或是较大的振動现象而使控制变得非常困难
组织块OB是操作系统与用户程序之间的接口,组织块由操作系统调用,组织块中的程序是用户编写的。S7 plc的组织块用来创建在特定的时间执行的程序或相应特定事件的程序,例如延时中断OB、外部硬件中断OB和错误中断OB等。
一、中断的基本概念
1、中断过程
中断处理用来实现对特殊内部事件或外部事件的快速响应,如果没有中断,CPU循环执行组织块OB1,因为除了背景组织块OB90以外,OB1的中断优先级低,CPU检测到中断源的中断请求,操作系统在执行完当前程序的当前指令(即断点处)后,立即响应中断。CPU暂停正在执行的程序,调用中断源的中断组织块OB来处理,执行完中断组织块后,返回被中断的程序断点处继续执行原来的程序。
有中断事件发生时,如果没有下载相应的组织块,CPU将会进入STOP模式,生成和下载一个空的组织块,出现相应的中断事件时,CPU也不会进入STOP模式。
PLC的中断源可能来自I/O模块的硬件中断,或者来自CPU模块内部的软件中断,例如时间中断、延时中断、循环中断和编程错误引起的中断。
一个OB的执行被另一个OB中断时,操作系统对现场进行保护,被中断的OB的局部数据压入L堆栈(局部数据堆栈),被中断的断点处的现场信息保存在I堆栈(中断堆栈)和B堆栈(块堆栈)中。中断程序不是由逻辑块调用,而是在中断事件发生时由操作系统调用,因为不能预知系统何时调用中断程序,中断程序不能改写其他程序中可能正在使用的存储器,中断程序应尽可能的使用局部变量。编写中断程序应越短越好,减少中断程序的执行时间,减少对其他事件处理的延迟,否则可能引起主程序控制的设备操作异常。
2、组织块的分类
组织块只能由操作系统启动,它由变量声明表和用户编写的控制程序组成。
(1)启动组织块:用于系统初始化,CPU上电或操作模式切换到RUN时,S7-300执行OB100,S7-400根据组态的启动方式执行OB100~OB102中的一个。
(2)循环执行OB1:需要连续执行的程序放在OB1中,循环执行。
(3)定期执行的组织块:包括时间中断组织块OB10~OB17,和循环中断组织块OB30~OB38,可以根据设定的日期时间或时间间隔执行中断程序。
(4)事件驱动的组织块:延时中断OB20~OB23在过程事件出现后延时一定时间再执行中断程序,硬件中断OB40~OB47用于需要快速响应的过程事件,时间出现时马上中止当前正在执行的程序,执行对应的中断程序。diangon.com版权所有!异步错误中断0B80~OB87和同步错误中断OB121、OB122用来决定出现错误时系统如何响应。
3、中断的优先级:也就是组织块的优先级,如果在执行中断程序(组织块)时,又检测到一个终端请求,CPU将比较两个中断源的中断优先级,如果优先级相同,按照产生中断请求的先后次序进行处理。如果后者的优先级比正在执行的OB的优先级高,将中止当前的正在处理的OB,
4、对终端的控制:时间中断和延时中断有专用的允许处理中断和禁止中断的系统功能SFC。
SFC39“DIS_INT”用来禁止中断和异步错误处理,可以禁止所有中断,有选择的禁用某些优先级范围的中断,或者只禁止指定的某个中断;
SFC40“EN_INT”用来激活新的中断和异步错误处理,激活中断是指允许处理中断,做好了在中断事件出现时执行对应的组织块的准备。可以全部允许或有选择的允许。
SFC41“DIS_AIRT”延迟处理比当前优先级更高的中断和异步错误,直到用SFC42允许处理中断或当前OB执行完毕,SFC42“EN_AIRT”用来允许立即处理被SFC41暂时禁止的中断和异步错误,SFC41和SFC42配对使用。
5、组织块的变量声明表:OB块是操作系统调用的,OB没有背景数据块,也不能为OB声明输入、输出参数和静态变量,OB的变量声明表中只有临时变量,OB的临时变量可以是基本数据类型、复杂数据类型或数据类型ANY。OB块包含OB的启动信息的20B的临时局部变量TEMP,这些信息在OB启动时由操作系统提供,包括启动事件、启动日期和时间、错误及诊断事件。声明表中的变量的具体内容与组织块的类型有关,参见下表 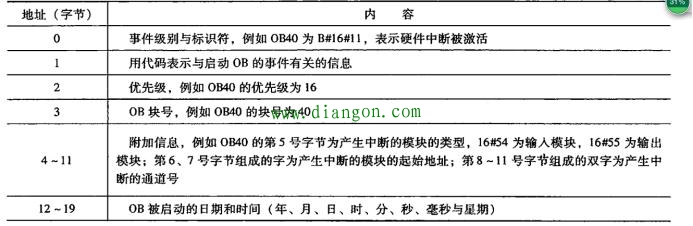
二、启动组织块
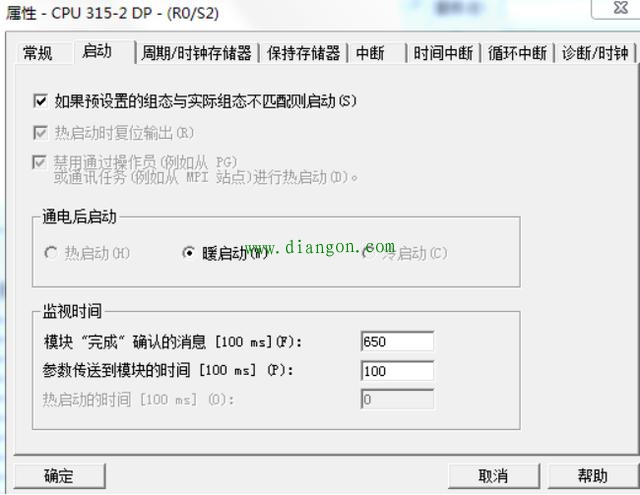
1、CPU的启动模式和启动组织块
400的CPU有3中启动方式,暖启动、热启动和冷启动,300CPU只能暖启动,参见下图:
用户可以通过在启动组织块中编写程序,用来设置CPU的初始化操作,例如设置开始运行时的某些变量的初始值和输出模块的初始值等。
1)暖启动过程映像数据以及非保持的存储器位、定时器和计数器被复位。具有保持功能的存储器位、定时器、计数器和所有的数据块将保留原数值,执行一个OB100后,循环执行OB1,将模式选择开关从STOP切换到RUN,执行一次暖启动。
2)热启动:400CPU在RUN模式下电源突然丢失,很快又重新上电,将执行OB101,自动完成热启动,从上次RUN模式结束时程序被中断之处继续执行,不对计数器等复位。
3)冷启动:所有系统存储区均被清除,即复位为零,包括有保持功能的存储区。调用OB102后循环执行OB1。
2、循环中断组织块
循环中断组织块用于按**时间间隔循环执行中断程序,例如周期性执行闭环控制系统PID控制程序,间隔时间从cpu从STOP切换到RUN开始计算。S7-300大多数只能使用OB35,其余CPU可以实用的循环中断OB的个数和CPU型号有关。时间间隔不能小于5ms。时间间隔过短,还没有执行完循环中断程序又开始调用它,将会产生时间错误时间,调用OB80,如果没有调用OB80,CPU将进入STOP。
举例说明:
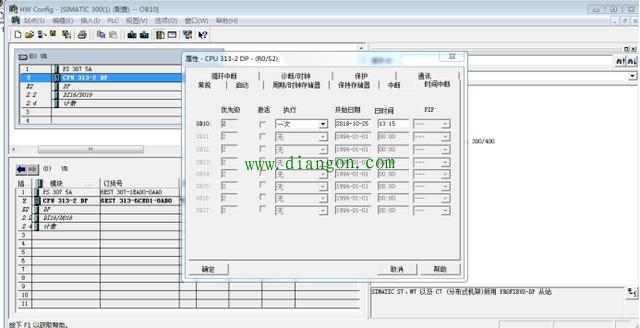
硬件组态如下:采用CPU315-2DP,双击硬件组态中的CPU,打开属性对话框,由【周期性中断】选项卡可知只能使用OB35。
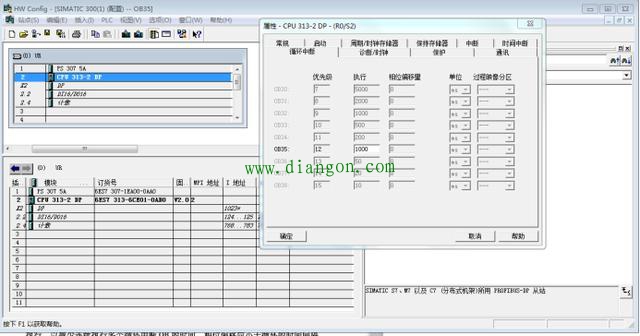
默认的循环周期为100ms,改成1000ms。
OB100程序
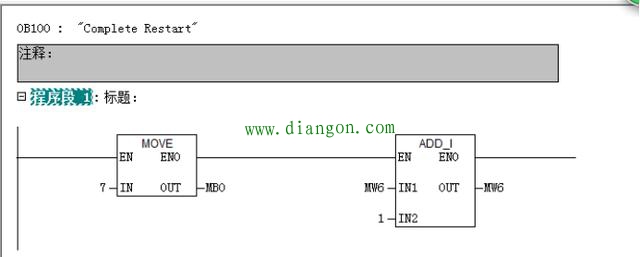
用MOVE将MB0的初值置7,即低3位为1,用ADD_I将MW6加1.
OB35程序:每经过1000ms,MW2被加1.如下图

禁止和激活硬件中断
SFC40“EN_IRT”和SFC39“DIS_IRT”分别是激活和禁止中断和异步错误的系统功能。参数MODE的数据类型为BYTE,MODE为2是激活OB_NR,采用16进制数来设置。
编写OB1程序如下:
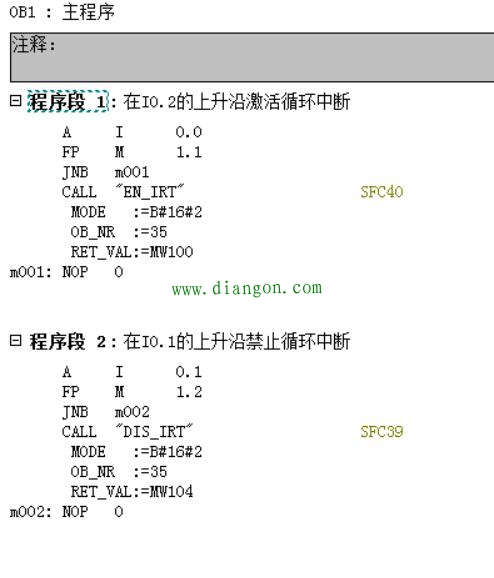
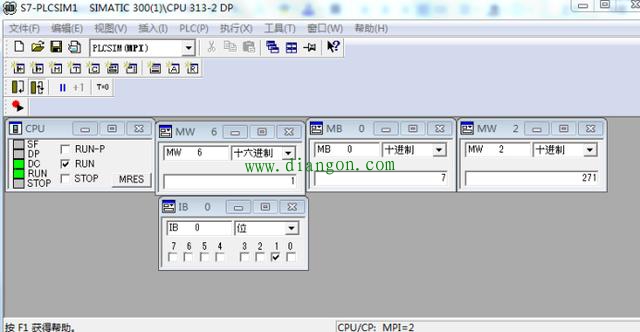
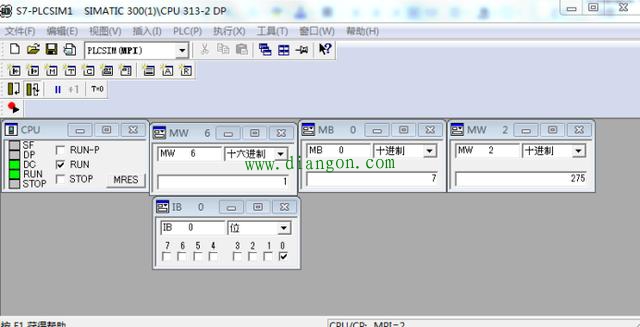
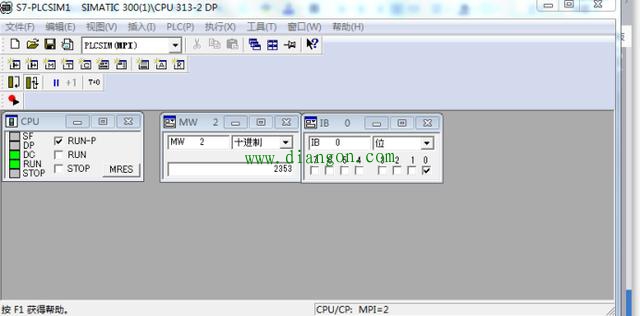
仿真实验如下:进入RUN模式后,可以看到MW6的值一直为1,表明只调用了一次OB100,MB0的低3为被置1,MW2每秒加1.用鼠标模拟产生I0.1循环中断被禁止,MW2不再加1,用鼠标模拟产生I0.0,循环中断被激活,MW2又开始加1.
3、时间中断组织块
300CPU只能使用OB10,400CPU可以使用OB10~17,可以设置在某一个特定的日期时间产生一次时间中断,也可以设置从设定日期时间开始,周期性的重复产生中断,可以用SFC28~SFC30设置、取消和激活时间中断。
1)、基于硬件组态的时间中断
要求在到达设置的日期和时间时,用Q4.0自动启动某台设备。具体如下:
硬件组态:打开CPU属性中的“时刻中断”选项卡,设置执行启动设备的日期和时间,执行方式为“一次”。
生成OB10,编写OB10程序如下,设置时间到时,将需要启动的设备对应的输出点置为1:
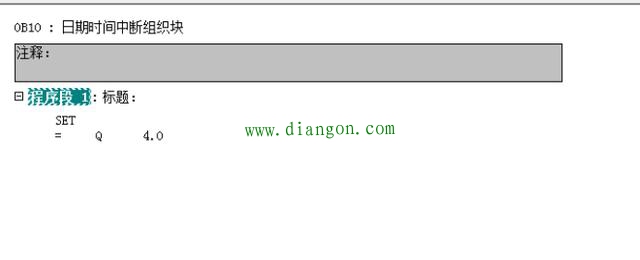
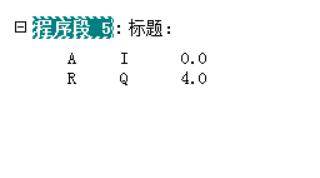
OB1程序:用I0.0将Q4.0复位
2)用SFC控制时间中断
除了在硬件组态功能中设置和激活时间中断外,也可以在用户程序中调用SFC来设置和激活时间中断,
在OB1调用SFC31来查询中断状态,读取的状态用MW16保存。如下图。
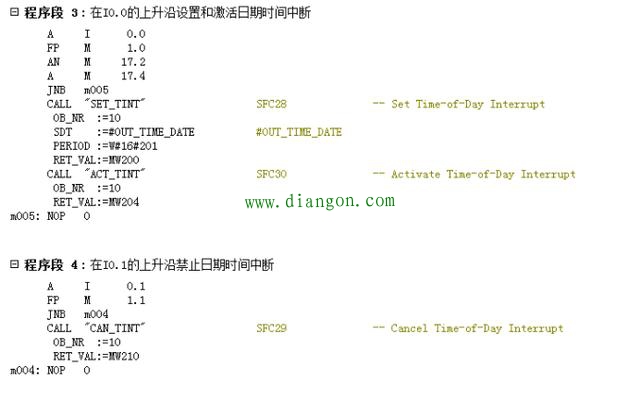
在I0.0的上升沿调用SFC28和SFC30分别来设置和激活时间中断OB10。用I0.1调用SFC29来禁止时间中断。各SFC的参数中的RET_VAL是执行时可能出现的错误代码,为0时无错误,OB_NR是组织块编号,SFC28用来设置时间中断,它的参数SDT是开始产生中断的日期和时间。PERIOD用来设置执行方式,w#16#0201表示每分钟产生一次中断。
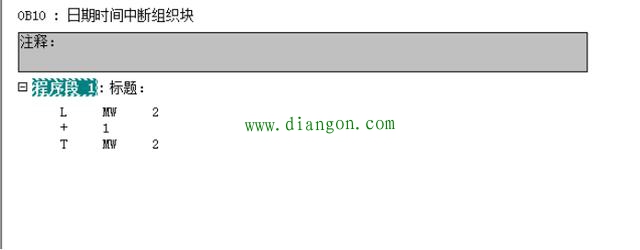
OB10程序如下:将MW2加1.
4、硬件中断组织块
OB40~47用于快速响应信号模块、通信模块和功能模块的信号变化,具有硬件中断功能的上述模块将中断信号传送给到CPU时,将触发硬件中断,S7-300只能用OB40。
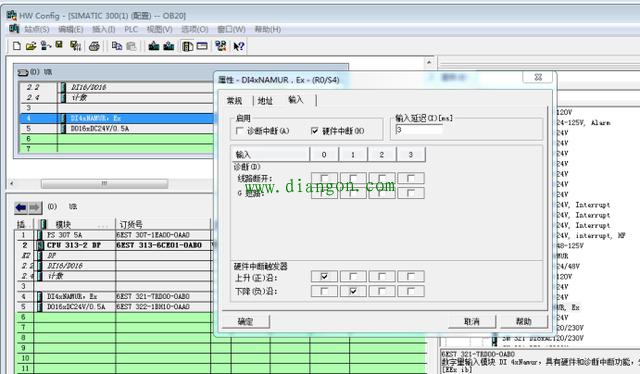
1)硬件组态
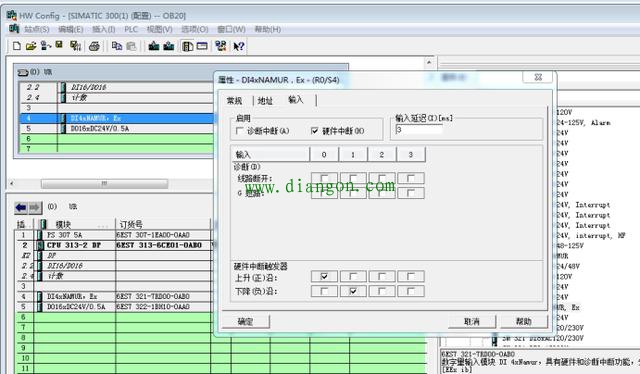
双击DI/DO模块,在属性对话框设置I0.0上升沿中断,I0.1下降沿中断。如下图所示:
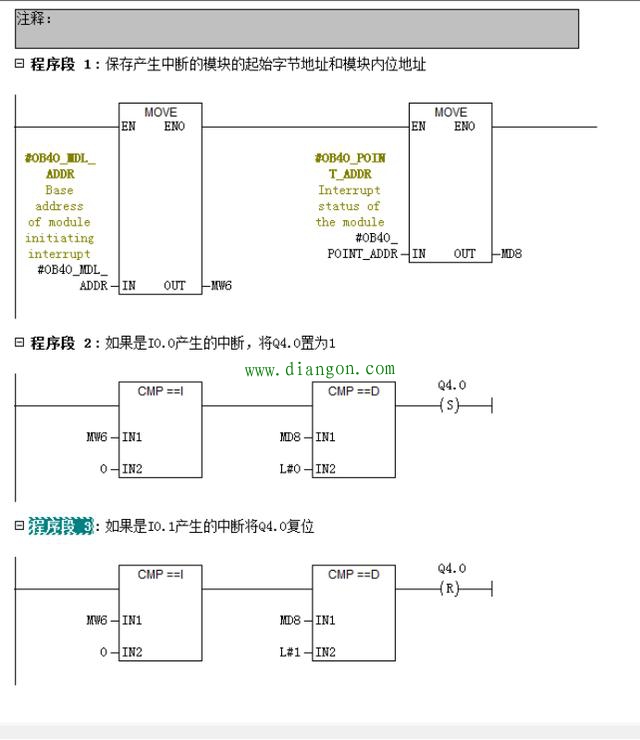
2)编写OB40程序
判断是哪个模块的哪个点产生中断,执行相应的操作。
3)禁止和激活硬件中断
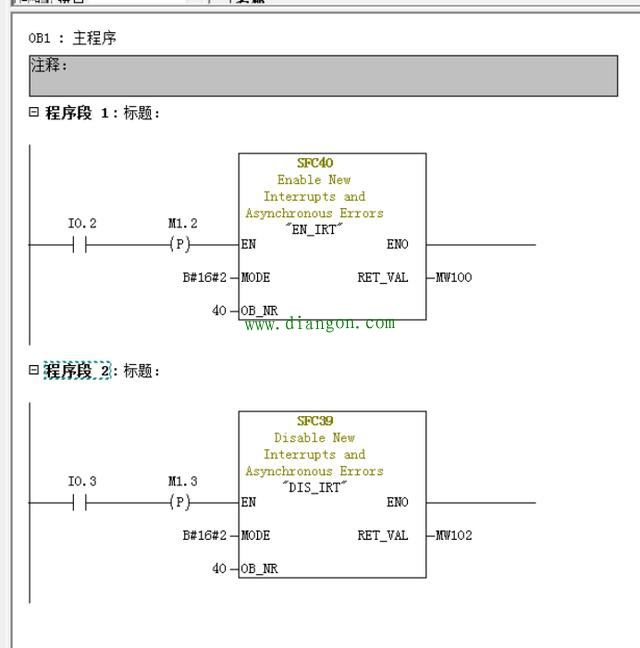
OB1程序在I0.2的上升沿调用SFC40激活OB40对应的硬件中断,I0.3的上升沿调用SFC39禁止OB40对应的硬件中断,SFC的MODE为2时,OB_NR为实参的OB的编号,程序如下:
5、延时中断组织块
PLC的普通定时器的工作和扫描工作方式有关,其定时精度较差,需要高精度的延时,应使用延时中断OB,用SFC32启动延时中断,延时时间1~60000ms,精度为1ms,
硬件组态
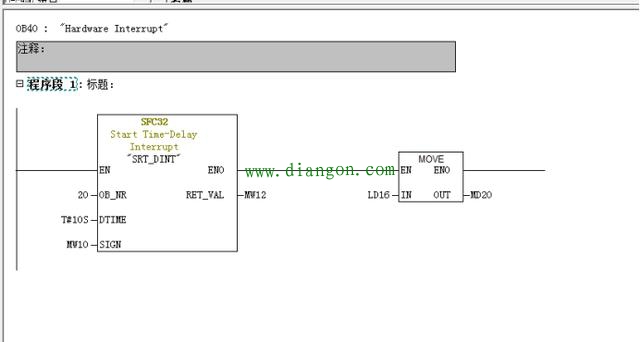
OB40程序:在I0.0的上升沿出发硬件中断,CPU调用OB40,在OB40中调用SFC32启动延时中断,延时10s,从LD12开始8B临时局部变量是调用OB40的日期时间,用MOVE指令讲起中的后4个字节LD16保存到MD20中。
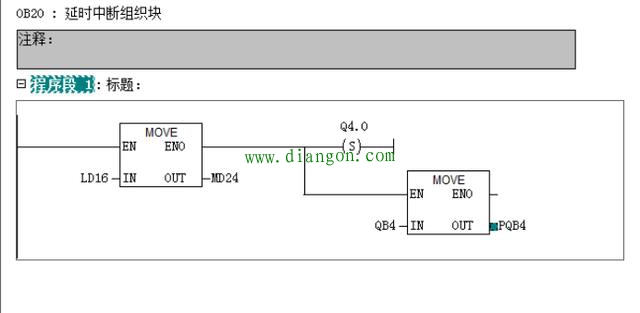
10s延时时间到,CPU调用SFC32指定的OB20.在OB20中用MOVE保存调用OB20的日期时间的后4个字节,将Q4.0置为,并通过PQB4立即输出。
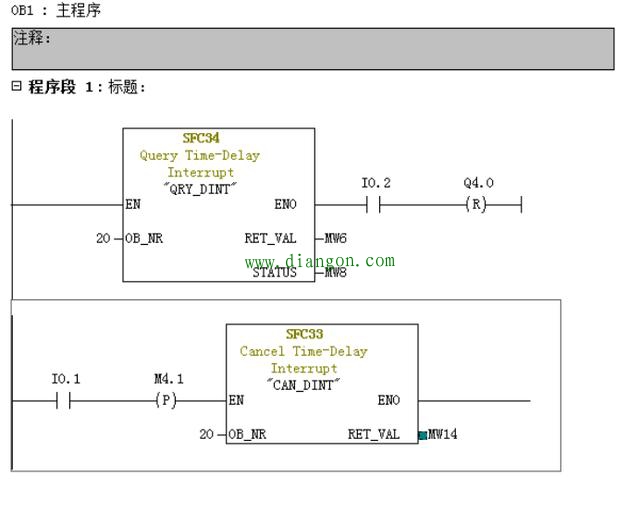
用I0.2将Q4.0复位,在OB1调用SFC34来查询延时中断的状态字,查询结果用MW8保存,其低字节为MB9,OB_NR的实参是延时中断OB的编号。RET_VAL为SFC执行时的错误代码,为0时无错误。
6、异步错误组织块
操作系统可以检测下列错误:不正确的CPU功能、操作系统执行中的错误、用户程序中的错误、I/O中的错误。当检测到一个错误,将启动相应的组织块如下图:
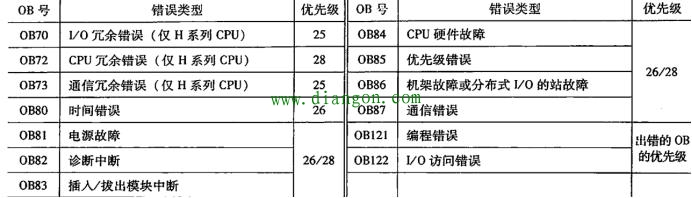
用户可以在组织块中编程,对发生的错误采取相应的措施,以减少或消除错误的影响,若没有生成或下载处理错误相应的组织块,当出现错误时CPU将进入STOP模式,下载一个空的OB,CPU也不会进入STOP。
利用系统功能SFC可以屏蔽、延迟或禁止各种OB的启动事件
|