西门子6ES7517-3AP00-0AB0安装调试
"NI LabVIEW帮助我们实现了高达2 kHz的ESP端口切换速率,并通过缩短风洞的整个操作周期为客户节省费用。我们在压力测量中实现0.01% FS的精度。"
关键字:
开发一个可用于飞机配置与组件的动静力测量、可用于电源设备的进气测试(即进气兼容性研究)、可用于稳定性导数评估的微震荡测试,也可用于模拟飞机失速与尾旋形成的高震荡与旋转导数的功能全面的、灵活可靠的测试系统。
The Solution:
利用NI的PXI与SCXI平台以及LabVIEW实时软件,开发一个可靠且高度**的数据采集与控制系统。
"NI LabVIEW帮助我们实现了高达2 kHz的ESP端口切换速率,并通过缩短风洞的整个操作周期为客户节省费用。我们在压力测量中实现0.01% FS的精度。"
风洞是一种空气动力学测试设备,它用于研究物体周围的气流模式并测量作用其上的空气动力。一个典型的风洞包含一个安置飞机模型的测试部分、一个位于该测试部分之前的压缩部分与稳定部分和一个位于该测试部分之后的扩散部分。位于该扩散部分的风扇提供所需的气流。这样的配置准确地模拟了飞机与气流间的相对运动。
风洞测试中的测量系统通常包含动静力测量、压力分布测量和用于依风向确定模型方向的位置测量。
系统配置
数据采集系统是一个包含有NI SCXI-1125模块的基于PXI的系统,用于接收来自压力扫描仪的压力测量结果。扫描仪中的压力端口的切换通过NI PXI-6527 完成,它也负责切换与监测系统中隔离阀、蝴蝶阀和球形阀的状态。
SCXI-1125用于采集压力传感器的输出以计算马赫数。该系统利用NI SCXI-1520 的六个通道采集来自六个张力测量装置的作用力数值。一个NI PXI-7344 运动控制器板卡控制与运动控制板卡接口的模型与渐增编码器的方向,将方向信息回传至系统。PXI-4472也用于振动与声压测量。
系统实现
系统软件基本分成两个模块,校准模块与采集模块。
校准模块——软件利用五点校准法校准压力传感器、ESP(电子压力扫描仪)和张力测量装置平衡。通过软件完成作用力平衡的端到端校准,以创建校准矩阵。NI LabVIEW 用于方便校准的执行,并提供非常准确的结果。该系统还可以验证校准的效果。
在创建新的校准并通过压力检验验证校准效果时所使用的GUI屏幕显示如图1 和图2 所示。

图1.ESP 校准屏幕显示

图2.经过校准的压力值的验证
采集模块——前面所提及的研究涉及两个基本的测量,压力测量和作用力测量。这两个测量都通过两阶段完成:一阶段采集压力与张力测量装置平衡的偏移量,另一阶段完成实际测量。偏移量将从第二阶段的测量中抽取,映射至对应的工程数值。
压力测量
飞机模型中的速率分布是通过采集来自模型上固定点的压力测量值所得。这项工作是通过端口与模型中一些固定点相连的电子压力扫描仪完成的。
在实际采集开始前,软件控制着维护流速及将模型引入气流所需的序列。用户仅须输入马赫数,该软件便可以控制整个风洞。在压力测量过程中,运动控制板卡用于让模型指向预设位置。
NI LabVIEW 帮助我们实现了高达2 kHz 的ESP 端口切换速率,并通过缩短风洞的整个操作周期为客户节省费用。我们在压力测量中实现0.01% FS 的精度。图3 展示了压力测量窗口。

图3.数据采集——压力测量
作用力测量
一个风洞涉及两种类型的作用力测量,静力测量和动力测量。静力测量要求将模型保持在预先设定的位置,而动力测量则要求在预先设定的曲线上移动模型并采集作用力的数值。
作用力测量涉及模型的偏移量的采集——使模型始终处于预设位置或者在预设的曲线上移动模型,并采集数据。接着,启动实际序列——顺序打开隔离阀、球形阀、蝴蝶阀和压力调节阀,并通过NI DIO 模块监测其状态。软件检验所设置的马赫数。
一旦达到了所设定的马赫数,软件将模型推入空气流中。在静力测量情况下,模型移动至某个特定的位置,进行作用力数据采集;模型移动至另一个位置,进行作用力数据采集;如此反复。对于动力测量,在模型引入气流中后,启动次采集。
模型旋转至与气流相同的曲线,并减小阀门。
挑战在于控制模型的位置并同步采集作用力数据和位置数据。如果没有NI运动控制板卡和PXI,这项工作将不可能通过单个处理器完成。运动控制器中的DSP 处理器帮助我们毫不复杂地完成了这项工作,并使得这两项操作相互独立且同步。
振动与声压测量
加速计与PXI-4472 相连,用于测量模型在特定马赫数情况下的振动。还通过所连接的麦克风采集飞机模型上的声压水平,供震荡研究使用。
所开发的系统为前述空气动力学研究提供了极高的灵活性与可靠性。我们能够将风洞控制、模型调整控制和数据集成在一个系统,免除了三个系统及其繁杂同步的必要。
基于PLC的水位测控装置开发与应用
1 引言
水位测控装置是水电厂的重要测控设备,水电厂的上下游水位是防汛安全的重要数据,拦污栅压差影响机组出力、水工建筑安全,水头值影响调速器协联曲线,进而影响机组效率甚至安全稳定运行,水位测控装置需满足长期稳定可靠运行。目前的水电厂水位测控装置普遍采用定制仪表采集前端水位传感器的格雷码值,换算栅差、水头等,输出开关信号报警,输出4~20ma信号至监控、远动、调速器。在运行维护中存在以下问题:采用电缆长距离输送格雷码信号,防雷、抗干扰能力差,仪表、传感器易损坏;4个24位格雷码传感器需100芯电缆维护困难;定制的仪表扩展性差,输入、输出校准,参数整定操作复杂;价格高,备品备件采购困难。开发基于通用硬件设备的水位测控装置意义重大。
根据水电厂水位测控具体要求,我们自主设计了基于plc的水位测控系统,具有高可靠性、配置灵活、安装维护简单方便特点。
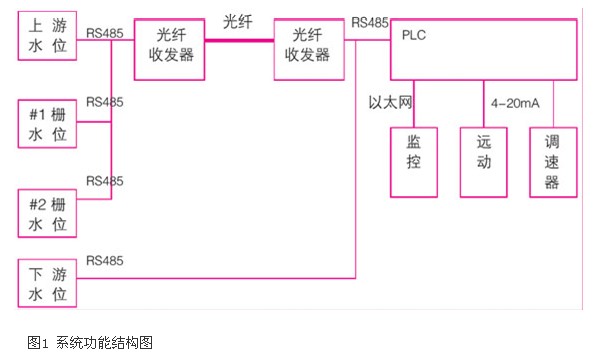
2 系统功能结构
水东水电站装设有上游、#1拦污栅后、#2拦污栅后、下游四个水位测量井,配置浮子式水位测量装置,采用值光电编码器将水位信息转换成数字信号。坝上传感器距离中控室500m,下游传感器距离中控室30m,为提高系统的防雷、抗干扰能力,坝上传感器通信采用光纤传输。水位测控装置plc通过rs485串行口采集编码器水位数据,经过换算处理模拟量输出模块输出4~20ma的上游、下游海拔值信号至远动rtu装置,输出4~20ma的水头信号至机组调速器电气调节装置。计算机监控系统通过网络连接水位测控装置plc,采集所有水位信息,故障报警信号等,并可远程设置相关参数、定值,系统功能结构如图1所示。
3 实现原理
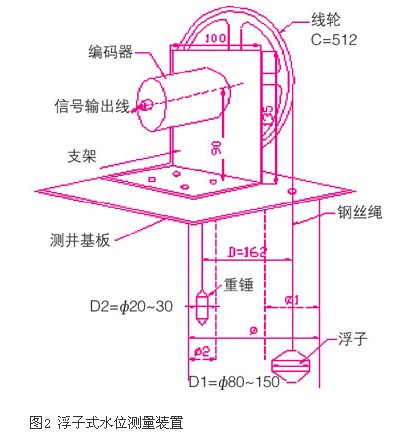
3.1 浮子式水位测量装置
该装置安装在测井口上方,当液位变化时,浮子随之上升或下降,测绳带动线轮做旋转运动,与线轮同轴连接的多圈值编码器就输出与液位对应的数字信号(见图2)。装置具有结构简单、合理,可靠性高、适应性强等优点,能够长期用于液位测量。
基于PLC的水位测控装置开发与应用
3.2 编码器
根据现场实际需求,编码器选用现场总线型输出的多圈值编码器。
值编码器由机械位置确定编码,每个编码唯一不重复,它不受停电、干扰的影响,无需记忆,无需找参考点,不用一直计数,什么时候需要知道位置,什么时候就去读取,这样,编码器的抗干扰特性、数据的可靠性大大提高了。多圈值编码器另一个优点是由于测量范围大,实际使用往往富余较多,这样在安装调试时不必费劲找零点,将在测量范围内的某一中间位置作为起始点就可以了,从而大大简化了安装调试难度。
编码器信号输出主要有并行格雷码输出、串行ssi输出、总线型输出、模拟量4~20ma输出。并行格雷码和模拟量输出信号读取简单但不适合长距离传输,串行ssi输出大部分是与西门子plc的ssi模块配套成本较高。现场总线型编码器用通讯方式传输信号,信号遵循rs485的物理格式,连接线少,传输距离远,对于编码器的保护和可靠性就提高了。信号的接收设备只需一个接口,就可以读多个编码器信号,多个编码器集中控制的情况下可以大大节省成本。
3.3 水位测控装置plc
plc选用m340模块化plc,它是施耐德公司生产的性能价格比很高的可编程控制器,已广泛应用于工业控制的各个领域。cpu模块选用高性能、大内存的bmxp34 2020,带一个100m以太网、一个485串行口;输入、输出模块可根据现场实际需求灵活配置。
4 软件设计
4.1 编程步骤
plc的硬件配置、控制程序采用施奈德的编程软件包unity pro完成,pc通过网络或usb与m340plc进行程序传送。首**行plc硬件组态,含底版、电源、cpu、输入输出模块等。通过电源模块属性可查看电源使用情况,应保留一定余量,否则需更换容量更大的电源模块;在cpu模块的serialport口配置串行链路参数如:485modbus主站、波特率9600、帧延时4ms、数据位8位、停止位1位、偶校验;创建网络链路ethernet1并配置ip地址等网络通信参数,将cpu模块的ethernet口链接到网络链路ethernet1;根据现场模拟量信号要求配置模拟量输出模块参数;定义相关变量等。
4.2 plc程序设计
(1)程序结构。程序采用模块化设计,具有较高可读性、可维护性其程序结构如图3所示。
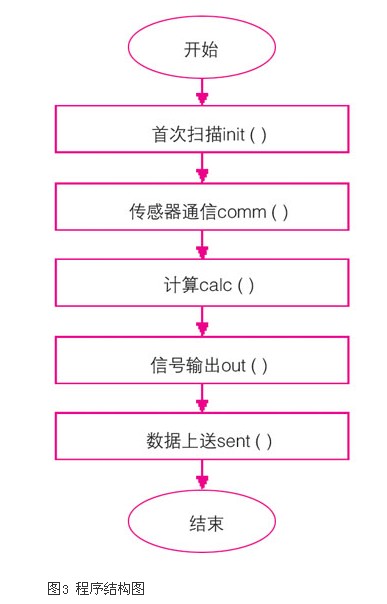
(2)程序注释。plc上电扫描执行初始化init()子程序,初始化通信参数,上、下游海拔预置值,各个传感器调零值,拦污栅压差整定值等。
传感器通信comm()子程序,分时读取传感器水位值,通信故障时水位保持原值。
计算calc()子程序,计算出上、下游,拦污栅后的实际海拔值,拦污栅压差、各机组有效水头等。
信号输出out()子程序,拦污栅压差过大报警、通信故障报警、装置故障报警、4~20ma模拟量输出等。
数据上送sent()子程序,根据监控上位机通信规约,组织上送数据信文,含各实际海拔值、有效水头、详细故障信息、拦污栅压差报警定值等。