6ES7215-1HF40-0XB0现货供应
(1)将电路的时域模型变换为相量模型(即保持电路的结构不变,将各个元件R、L、C用复阻抗表示,电源用相量表示);每个元件或无源二端网络都用复阻抗或复导纳表示;
(2)运用基尔霍夫定律(KCL、KVL)和元件伏安关系的相量形式并结合各种分析方法建立复代数方程;联立求解复代数方程组,根据题目要求求出电压或电流响应相量;
(3)把求出的电压或电流响应相量变换成正弦量,根据需要写出正弦量的解析式或计算出其它量。
正弦交流电路的分析计算与直流电路的分析计算一样。
需注意:电压、电流改为相量、电阻改为阻抗。
使用相量法之后,分析计算电阻电路的各种方法和电路定理都可用于正弦电路的稳态分析,其差别仅在于所得电路方程为相量形式的代数方程(复数方程)以及用相量描述的电路定理,而计算为复数运算
引入相量的概念,交流电路的新有定律都与直流电路有相同的形式,即直流电路中所有的分析方法对交流电路均适用。基尔霍夫电流定律用方程表达为 ![]()
当电路处于正弦稳态时,所有激励和响应都是同频率的正弦时间函数。 正弦电流 ![]() ,则对电路的任一节点而言,根据
,则对电路的任一节点而言,根据
基尔霍夫电流定律有 ![]()
将上式中对复数取虚部的运算与求和的运算次序交换 ① ,得
![]()
上式的几何解释为,旋转相量 ![]() 于任意时刻在虚轴上的投影恒等于零。
于任意时刻在虚轴上的投影恒等于零。
相量 ![]() 必然恒等于零,即
必然恒等于零,即 ![]() (1a )
(1a )
将上式各项除以 ![]() ,得
,得
![]() (1b)
(1b)
式 (1) 就是基尔霍夫电流定律的相量形式。用语言表述为:在正弦电流电路中,由任一节点流出 ( 或流入 ) 的各支路电流的有效值相量 ( 或幅值相量 )的代数和恒等于零。
基尔霍夫电压定律用方程表达为 ![]()
在正弦稳态下,设正弦电压 ![]() , 则对任何回路而言,根据基尔霍夫电压定律,并按照导出式 (1) 的相同步骤,可以得
, 则对任何回路而言,根据基尔霍夫电压定律,并按照导出式 (1) 的相同步骤,可以得
到 ![]() (2a )
(2a )
和 ![]() (2b)
(2b)
以上两式就是基尔霍夫电压定律的相量形式。用语言表述为:在正弦电流电路的任一回路中,沿着任意选定的回路参考方向计算各支路电压有效值相量 ( 或幅 值相量 ) 的代数和恒等于零
三菱电机80年代推出的F系列小型PLC在90年代初被F1,系列和F2系列取代,F1,系列在我国曾经有很高的。其后的FX2系列在硬件和软件功能上都有很大的提高,后来推出的FXo,FX0s,FX0N和FX2N等系列实现了微型化和多品种化,可满足不同用户的需要。Fl系列和FX2系列早已属于淘汰产品,三菱电机现在的FX系列产品样本中仅有FX1S ,FXlN、FX2N和Fx2NC这4个子系列,与过去的产品相比,在性能价格比上又有明显的提高。
FX系列的适应面广,如FX2N和FX2NC多可扩展到256个I/O点,并且有很强的网络通信功能,能够满足大多数要求较高的系统的需要,FX系列是国内使用得多的PLC系列产品之一
FX2NC具有很高的性能体积比和通信功能,可安装到比标准的PLC小很多的空间内。I/O型连接器可降低接线成本,节约接线时间。I/O点数可扩展到256点,可选用实时时钟,多可连接4个特殊功能模块。利用内置的功能,可控制两轴(包括插补功能),通过增加扩
展单元可控制多轴。
通过通信扩展板或特殊适配器可实现多种通信和数据链接,如CC–link,Profibus,DeviceNet开放式网络通信,RS–232C和RS–485通信,N:N链接、并行链接、计算机链接和I/O链接。FX2NC系列也可以使用FX0N和FX2N的扩展模块。


模拟量扩展模块都是特殊功能模块,可用特殊功能模块读指令FROM(FNC78)和特殊功能模块写指令TO(FNC79)进行编程。
FROM指令用于从特殊单元缓冲存储器(BFM)中读入数据。格式:

含义:将编号为m1的特殊单元模块内,从缓冲存储器(BFM)号为m2开始的n个数据读入基本单元,并存放在从[D.]开始的n个数据寄存器中。
TO指令用于向特殊单元缓冲存储器(BFM)中写入数据。格式:

说明:
⑴ m1:特殊功能模块的模块号码。
模块号从基本单元近的开始按No.0→→No.2┅┅顺序连接。
模块号用于以FROM/TO指令指定哪个模块工作。
⑵ m2:缓冲存储器(BFM)号码。
特殊功能模块中内藏了32点16位RAM存储器,即缓冲存储器。缓冲存储器号为#0~#32766,其内容根据各模块的控制目的而设定。
⑶ n:待传送数据的字数。
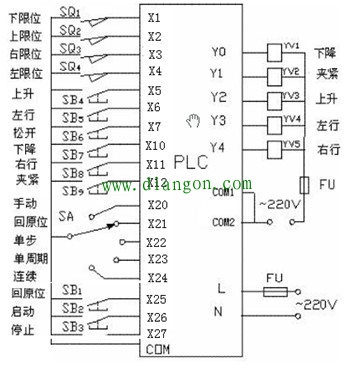
| 一、系统的硬件设计 1、系统元件I/O分配表 根据分析,可得plc控制系统的输入输出点分配
2、绘制PLC硬件接线图及硬件连接 根据I/O分配表,可画出PLC的外部接线示意图。
二、系统的软件设计 运用步进指令编写机械手顺序控制的程序比用基本指令更容易、更直观。在机械手的控制系统中,手动和回原点工作方式用基本指令很容易实现,故手动和回原点工作方式用基本指令编写,自动工作方式用步进指令编写。 机械手控制系统的程序总体结构如图所示,分为公用程序、自动程序、手动程序和回原点程序等四部分。其中自动程序包括单步、单周期和连续运行的程序,由于它们的工作顺序相同,可将它们合编在一起。
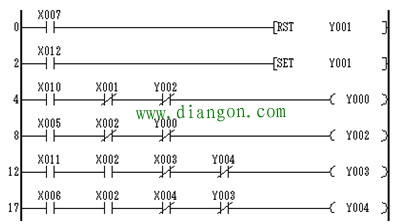
手动程序如图2所示,用X5~X12对应的机械手的上下、左右移和夹钳松紧的按钮,按下不同的按钮,机械手执行相应的动作。
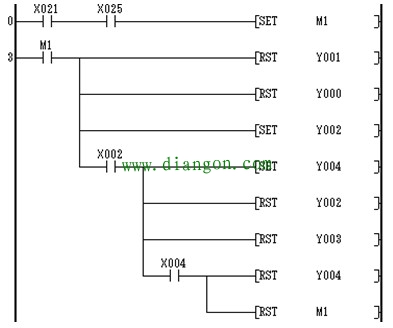
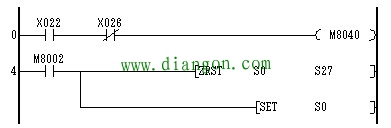
如图3为回原点程序,在系统处于回原点状态时,按下回原点按钮(X25为ON),机械手松开并上升,当上升到上限位,机械手左移直到碰到左限位开关才停止。 公用程序如图4所示,当执行但不工作方式时,X22为ON,特殊辅助继电器M8040为ON,为禁止转移状态。假设系统处于初始状态,当按下启动按钮,系统开始以单步工作方式运行,在完成某一步的动作后必须按一次启动按钮,系统才能进入下一步。
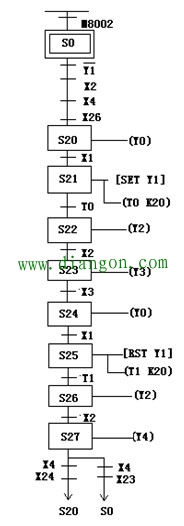
图 机械手自动单周期/连续运行的状态转移图 |