西门子模块6ES7322-1BH10-0AA0型号规格
1.状态继电器
状态继电器是用于编制顺序控制程序的一种编程元件(状态标志),它与后面介绍的STL指令(步进梯形指令)一起使用。
通用状态继电器没有断电保持功能。在使用IST(初始化状态功能)指令时,其中的S0~S9供初始状态使用。
电池后备/锁存状态继电器在断电时用带锂电池的RAM或EEPROM来保存其ON/OFF状态。
2.状态继电器使用举例
某机械手先后有下降、夹紧等动作,其顺序功能图如图1所示。如果起动信号X0为ON,则状态继电器S20被置位(变为ON),控制下降的电磁阀Y0动作。下限位开关Xl为ON时,状态继电器S21被置位,控制夹紧的电磁阀Y1动作。随着动作的转移,前一状态继电器自动变为OFF状态。不对状态继电器使用步进梯形指令时,可以把它们当作普通辅助继电器(M)使用
3.信号报警器标志(Annunciator Flags)
在使用应用指令ANS(信号报警器置位)和ANR(信号报警器复位)时,状态继电器S900~S999可用作外部故障诊断的输出,称为信号报警器
LDP,ANDP和ORP是用来作上升沿检测的触点指令,触点的中间有一个向上的箭头,对应的触点仅在位元件的上升沿(由OFF变为ON)时接通一个扫描周期。
LDF,ANDF和ORF是用来作下降沿检测的触点指令,触点的中间有一个向下的箭头,对应的触点仅在位元件的下降沿(由ON变为OFF)时接通一个扫描周期。
上述指令可以用于X,Y,M,T,C和S。在下图中X2的上升沿或X3的下降沿,Y0仅在一个扫描周期为ON。

用手持式编程器输入指令LDP,ANDP或ORP指令时,先按LD,AND或OR键,再按P/I键,输入指令LDF,ANDF或ORF指令时,先按LD,AND或OR键,再按F键
西门子S120电源模块6SL3130-7TE31-2AA3
在操作电气设备时,该设备的某些部分必然会处于危险电压下。
如果不正确的操作设备,可能造成死亡、重伤或巨大的财产损失。
只有具备相应资质的人员才可以操作此设备或在其附近工作。
只有规范运输、存放、并规范地安装和装配设备,才能确保设备正常、可靠地运行。
开始安装或维护工作前应该关闭设备的主开关,防止设备被接通。
违反该规定可能会导致作业人员接触到带电零部件,从而导致严重的人身伤害甚至死亡。
SITOP PSU100S 是一款用于连接到单相交流电网的开关型电源。 本电源输出的是一个可由电位计调节的直流电压。 电源输出端为电位隔离,设计有空载保护和短路保护。 LED 信号用于显示运行状态。 通过信号触点可以处理设备的运行状态。
① | 输入交流电压 |
② | 输出直流电压 |
③ | 信号触点 |
④ | 电位计 22.2…28 / 24...28 V / 11.5…15.5 V |
⑤ | 指示灯(输出电压正常) |
⑥ | 导轨滑块 |
⑦ | 自然对流 |
⑧ | 上方/下方空间 |
SITOP PSU8200 5 A 1ph 和 SITOP PSU8200 10 A 1ph 是用于连接到单相交流电压网上的主开关模式电源。设备输出的是电子稳压式直流电压,电压大小可通过电位计设置。电源输出端为电位隔离,设计有空载保护和短路保护。LED 用于显示操作状态。通过信号触点可以处理设备的运行状态。通过远程触点可实现设备的远程开启/关闭。
① | AC 输入端 |
② | DC 输出端 |
③ | 24 - 28.8 V 电位计 |
④ | 信号触点 (13、14),远程触点 (15、16) |
⑤ | 指示灯 (24 V O.K.、OVERLOAD、SHUT DOWN) |
⑥ | 选择开关 A/B |
⑦ | DIN 导轨滑槽 |
⑧ | 对流 |
⑨ | 上方/下方空间 |
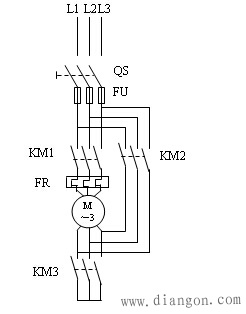
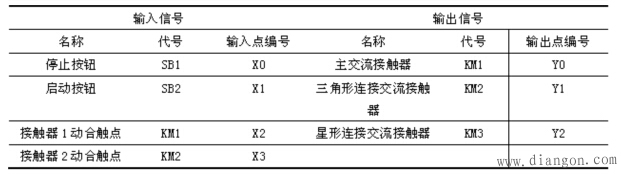
按照三相异步电动机控制原理图(图1)接线或用控制模板代替。图中的QS为电源刀开关,当KM1、KM3主触点闭合时,电动机星形连接;当KM1、KM2主触点闭合时,电动机三角形连接。 设计一个三相异步电动机星-三角降压启动控制程序,要求合上电源刀开关,按下启动按钮SB2后,电机以星形连接启动,开始转动5S后,KM3断电,星形启动结束。 若项目描述改为:设计一个三相异步电动机星-三角降压启动控制程序,要求合上电源刀开关,按下启动按钮SB2后,电机以星形连接启动,开始转动5S后,KM3断电,星形启动结束。为了有效防止电弧短路,要延时300ms后,KM2接触器线圈得电,电动机按照三角形连接转动。不考虑过载保护。 (1) 输入点和输出点分配 见表。
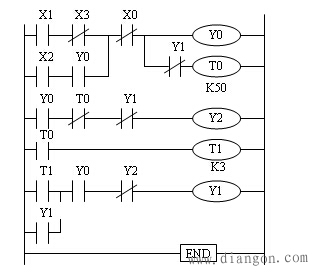
表 输入点和输出点分配表 (2) plc接线图 按照图1完成PLC的接线。图中输入端的24V电源可以利用PLC提供的直流电源,也可以根据功率单独提供电源。若实验用PLC的输入端为继电器输入,也可以用220V交流电源。 图1中,电路主接触器KM和三角形全压运行接触器的动合辅助触点作为输入信号接于PLC的输入端,便于程序中对这两个接触器的实际动作进行监视,通过程序以保证电机实际运行的安全。PLC输出端保留星形和三角形接触器线圈的硬互锁环节,程序中也要另设软互锁。 (3)程序设计 图2为电机星-三角降压启动控制的梯形图。在接线图1中将主接触器KM1和三角形连接的接触器KM2辅助触点连接到PLC的输入端X2、X3,将启动按钮的动合触点X1与X3的动断触点串联,作为电机开始启动的条件,其目的是为防止电机出现三角形直接全压启动。因为,若当接触器KM2发生故障时,如主触点烧死或衔铁卡死打不开时,PLC的输入端的KM2动合触点闭合,也就使输入继电器X3处于导通状态,其动断触点断开状态,这时按下启动按钮SB2(X1闭合),输出Y0也不会导通,作为负载的KM1就无法通电动作。
在正常情况下,按下启动按钮后,Y0导通,KM1主触点动作,这时如KM1无故障,则其动合触点闭合,X2的动合触点闭合,与Y0的动合触点串联,对Y0形成自锁。定时器T0开始计时,计时5s。 Y0导通,其动合触点闭合,程序第2行中,后面的两个动断触点处于闭合状态,从而使Y2导通,接触器KM3主触点闭合,电机星形启动。当T0计时5s后,使Y2断开,即星形启动结束。该行中的Y1动断触点起互锁作用,保证若已进入三角形全压启动时,接触器KM3呈断开状态。 T0定时到的也就是星形启动结束后,防止电弧短路,需要延时接通KM2,程序第3行的定时器T1起延时0.3s的作用。 T1导通后,程序第4行使Y1导通,KM2主触点动作,电机呈三角形全压启动。这里的Y2动断触点也起到软互锁作用。由于Y1导通使T0失电,T1也因T0而失电,程序中用Y2的动断触点对Y1自锁。 按下停止按钮,Y0失电,从而使Y1或Y2失电,也就是在任何时候,只要按停止按钮,电机都将停转。 (4)运行并调试程序 a.将梯形图程序输入到计算机。 b.下载程序到PLC,并对程序进行调试运行。观察电机在程序控制下能否实现自动星-三角降压启动。 c.调试运行并记录调试结果。 |