西门子6ES7331-7NF10-0AB0性能参数
(一)决定系统所需的动作及次序。
当使用可编程控制器时,重要的一环是决定系统所需的输入及输出。输入及输出要求:
(1) 步是设定系统输入及输出数目。
(2) 第二步是决定控制先后、各器件相应关系以及作出何种反应。
(二)对输入及输出器件编号
每一输入和输出,包括定时器、计数器、内置寄存器等都有一个的对应编号,不能混用。
(三)画出梯形图。
根据控制系统的动作要求,画出梯形图。
梯形图设计规则
(1)触点应画在水平线上,并且根据自左至右、自上而下的原则和对输出线圈的控制路径来画。
(2)不包含触点的分支应放在垂直方向,以便于识别触点的组合和对输出线圈的控制路径。
(3)在有几个串联回路相并联时,应将触头多的那个串联回路放在梯形图的上面。在有几个并联回路相串联时,应将触点多的并联回路放在梯形图的左面。这种安排,所编制的程序简洁明了,语句较少。
(4)不能将触点画在线圈的右边。
(四)将梯形图转化为程序
把继电器梯形图转变为可编程控制器的编码,当完成梯形图以后,下一步是把它的编码编译成可编程控制器能识别的程序。
这种程序语言是由序号(即地址)、指令(控制语句)、器件号(即数据)组成。地址是控制语句及数据所存储或摆放的位置,指令告诉可编程控制器怎样利用器件作出相应的动作。
(五)在编程方式下用键盘输入程序。
(六)编程及设计控制程序。
(七)测试控制程序的错误并修改。
(八)保存完整的控制程序
工业生产现场的环境条件一般是比较恶劣的,干扰源众多。例如大功率用电设备的启动或者停止引起电网电压的波动形成低频干扰;电焊机、电火花加工机床、电机的电刷等会产生高频电火花干扰;各种动力电源线会通过电磁耦合产生工频干扰等等。这些干扰都会影响可编程控制器的正常工作。
可编程控制器是专门在生产现场使用的控制装置,在设计制造时已采取了很多措施,使它的环境适应力比较强。为了确保整个系统稳定可靠,还是应当尽量使可编程控制器有良好的工作环境条件,并采取必要的抗干扰措施。
一、可编程控制器的安装
安装环境
可编程控制器适用于大多数工业现场,但它对使用场合、环境温度等还是有一定要求的。控制可编程控制器的工作环境可以有效地提高它的工作效率和使用寿命。在安装可编程控制器时要避开下列场所:
*环境温度超过0~55℃的范围。
*相对湿度超过85%或者存在露水凝聚(有温度突变或其他因素所引起的)。
*太阳光直接照射。
*有腐蚀和易燃的气体,例如氯化氢、硫化氢等。
*有大量铁屑及灰尘。
*频繁或连续的振动,振动频率为10~55Hz,幅度为0.5mm(峰—峰)。
*超过10g(重力加速度)的冲击。
小型可编程控制器外壳的四个角上均有安装孔,有两种安装方法,一种是用螺钉固定,不同的单元有不同的安装尺寸。另一种是DIN(德国工业标准)轨道固定,DIN轨道配套使用的安装夹板左右各一对,在轨道上先装好左右夹板,装上可编程控制器,拧紧螺丝。为了使控制系统工作可靠,通常把可编程控制器安装在有保护外壳的控制柜中,以防止灰尘、油污水溅;为了保证可编程控制器在工作状态下其温度保持在规定环境温度范围内,安装机器应有足够的通风空间、基本单元和扩展单元之间要有30mm以上间隔。如果周围环境超过55℃,要安装电风扇强迫通风。
为了避免其它外围设备的电干扰,可编程控制器应尽可能远离高压电源线和高压设备,可编程控制器与高压设备和电源线之间应留出至少200mm的距离。
当可编程控制器垂直安装时,要严防导线头、铁粉、灰尘等脏物从通风窗掉入可编程控制器内部。导线头等脏物会损坏可编程控制器印制电路板,使其不能正常工作。
二、接线
电源
PLC的供电电源为50Hz、220V±10%交流市电。
S7-200系列可编程控制器有直流24V输出接线端,该接线端可为输入传感器(如光电开关或接近开关)提供直流24V电源。
如果电源发生故障,中断时间少于10ms,可编程控制器工作不受影响。若电源中断超过10ms或电源下降超过允许值,则可编程控制器停止工作,所有的输出点均断开。当电源恢复时,若RUN输入接通,则操作自动进行。
对于电源线来的干扰,可编程控制器本身具有足够的抵制能力。如果电源干扰特别严重,可以安装一个变比为1:1的隔离变压器,以减少设备与地之间的干扰。
三、接地
良好的接地是保证可编程控制器可靠工作的重要条件,可以避免偶然发生的电压冲击危害。接地线与机器的接地端相接,基本单元接地,如果要用扩展单元,其接地点应与基本单元的接地点接在一起。
为了抑制附加在电源及输入端、输出端的干扰,应给可编程控制器接以专用地线,接地点应与动力设备(如电动机)的接地点分开。若达不到这种要求,则也必须做到与其它设备公共接地,禁止与其它设备串联接地。接地点应尽可能靠近可编程控制器。
四、直流+24V接线端
使用无源触点的输入器件时,可编程控制器内部24V电源通过输入器件向输入端提供每点7mA的电流。
可编程控制器上的24V接线端子还可以向外部传感器(如接近开关或光电开关)提供电流。L+端子作传感器电源时, M端子是直流L+地端,即0V端。如果采用扩展单元,则应将基本单元和扩展单元的24V端连接起来。任何外部电源都不能接到这个端子。
如果有过载现象发生,电压将自动跌落,该点输入对可编程控制器不起作用。
每种型号的可编程控制器其输入点数量是有规定的。对每一个尚未使用的输入点,它不耗电,在这种情况下24V电源端子外供电流的能力可以增加。
S7-200系列可编程控制器的空位端子在任何情况下都不能使用。
五、输入接线
可编程控制器一般接受行程开关、限位开关等输入的开关量信号。输入接线端子是可编程控制器与外部传感器负载转换信号的端口,输入接线一般指外部传感器与输入端口的接线。
输入器件可以是任何无源的触点或集电极开路的NPN管。输入器件接通时,输入端接通,输入线路闭合,输入指示的发光二极管亮。
输入端的一次电路与二次电路之间采用光电耦合隔离。二次电路带R-C滤波器,以防止由于输入触点抖动或从输入线路串入的电噪声引起可编程控制器的误动作。
若在输入触点电路串联二极管,在串联二极管上的电压应小于4V。若使用带发光二极管的舌簧开关时,串联二极管的数目不能超过两只。
输入接线还应特别注意:
(1)输入接线一般不要超过30m,但如果环境干扰较小,电压降不大时,输入接线可适当长些。
(2)输入、输出线不能用同一根电缆。输入、输出线要分开走。
(3)可编程控制器所能接受的脉冲信号的宽度应大于扫描周期的时间。
六、输出接线
(1)可编程控制器有继电器输出、晶闸管输出、晶体管输出三种形式。
(2)输出端接线分为独立输出和公共输出。当可编程控制器的输出继电器或晶闸管动作时,同一号码的两个输出端接通。在不同组中可采用不同类型和电压等级的输出电压。但在同一组中的输出,只能用同一类型、同一电压等级的电源。
(3)由于可编程控制器的输出元件被封装在印制电路板上,并且联接至端子板,若将连接输出元件的负载短路,将烧毁印制电路板,应用熔丝保护输出元件。
(4)采用继电器输出时承受的电感性负载大小影响到继电器的工作寿命,因继电器的工作寿命要求要长。
(5)可编程控制器的输出负载可能产生噪声干扰,要采取措施加以抑制。
对于能使用户造成伤害的危险负载,除了在控制程序中加以考虑之外,应设计外部紧急停车电路,使得可编程控制器发生故障时,能将引起伤害的负载电源切断。
交流输出线和直流输出线不要用同一根电缆,输出线应尽量远离高压线和动力线,避免并行
西门子6AV2123-2DB03-0AX0
S7-200 SMART每个CPU系统只允许使用一条扩展电缆。扩展电缆的程度为1m。
订货号 | 6ES7288-6EC01-0AA0 |
| 电缆长度 | 1m |
| 重量 | 80g |
表1.S7-200 SMART扩展电缆
扩展电缆安装
可以将其安装在CPU和一个EM之间,或者安装在任意两个EM之间,具体安装如下图所示:

图1. 扩展电缆安装图
 在振动环境中安装扩展电缆 如果将扩展电缆连接在移动或固定不牢的模块上,电缆头连接处可能会慢慢松动。 为了提供额外的应力消除作用,应使用电缆扎带将电缆头固定在DIN导轨(或其它位置)上。安装期间拉拽电缆时应避免用力过猛。安装完成后,确保电缆与模块连接到位。
在振动环境中安装扩展电缆 如果将扩展电缆连接在移动或固定不牢的模块上,电缆头连接处可能会慢慢松动。 为了提供额外的应力消除作用,应使用电缆扎带将电缆头固定在DIN导轨(或其它位置)上。安装期间拉拽电缆时应避免用力过猛。安装完成后,确保电缆与模块连接到位。
1、输入接线
plc一般接受行程开关、限位开关等输入的开关量信号。输入接线端子是PLC与外部传感器负载转换信号的端口。输入接线,一般指外部传感器与输入端口的接线。
输入器件可以是任何无源的触点或集电极开路的NPN管。输入器件接通时,输入端接通,输入线路闭合,输入指示的发光二极管亮。
输入端的一次电路与二次电路之间,采用光电耦合隔离。二次电路带RC滤波器,以防止由于输入触点抖动或从输入线路串入的电噪声引起PLC误动作。
若在输入触点电路串联二极管,在串联二极管上的电压应小于4V。若使用带发光二极管的舌簧开关,串联二极管的数目不能超过两只。
输入接线还应特别注意以下几点:
(1)输入接线一般不要超过30m。但如果环境干扰较小,电压降不大时,输入接线可适当长些。
(2)输入、输出线不能用同一根电缆,输入、输出线要分开。
(3)可编程控制器所能接受的脉冲信号的宽度,应大于扫描周期的时间。
2、输出接线
(1)可编程控制器有继电器输出、晶闸管输出、晶体管输出3种形式。
(2)输出端接线分为独立输出和公共输出。当PLC的输出继电器或晶闸管动作时,同一号码的两个输出端接通。在不同组中,可采用不同类型和电压等级的输出电压。但在同一组中的输出只能用同一类型、同一电压等级的电源。
(3)由于PLC的输出元件被封装在印制电路板上,并且连接至端子板,若将连接输出元件的负载短路,将烧毁印制电路板,应用熔丝保护输出元件。
(4)采用继电器输出时,承受的电感性负载大小影响到继电器的工作寿命,继电器工作寿命要求长。
(5)PLC的输出负载可能产生噪声干扰,要采取措施加以控制。
对于能使用户造成伤害的危险负载,除了在控制程序中加以考虑之外,还应设计外部紧急停车电路,使得可编程控制器发生故障时,能将引起伤害的负载电源切断。交流输出线和直流输出线不要用同一本电缆,输出线应尽量远离高压线和动力线,避免并行。
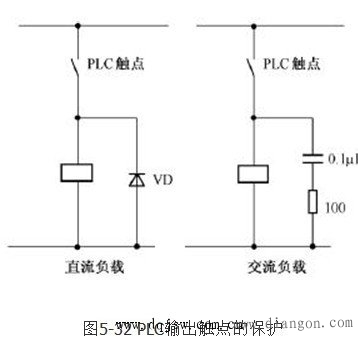
PLC与感性设备的连接:
当PLC输入输出端接有感性负载元件时,直流输出的续流管保护(直流电路两端并联续流二极管),交流输出阻容吸收电路。

对与大容量负载电路,须在继电器主触头两端连接RC阻容吸收电路
| 1、基本概念 我们生活在一个物质的世界中。世间所有的物质都包含了化学和物理特性,我们是通过对物质的表观性质来了解和表述物质的自有特性和运动特性。这些表观性质就是我们常说的质量、温度、速度、压力、电压、电流等用数学语言表述的物理量,在自控领域称为工程量。这种表述的优点是直观、容易理解。在电动传感技术出现之前,传统的检测仪器可以直接显示被测量的物理量,其中也包括机械式的电动仪表。 2、标准信号 在电动传感器时代,中央控制成为可能,这就需要检测信号的远距离传送。纷繁复杂的物理量信号直接传送会大大降低仪表的适用性。大多传感器属于弱信号型,远距离传送很容易出现衰减、干扰的问题。才出现了二次变送器和标准的电传送信号。二次变送器的作用就是将传感器的信号放大成为符合工业传输标准的电信号,如0-5V、0-10V或4-20mA(其中用得多的是4-20mA)。而变送器通过对放大器电路的零点迁移以及增益调整,可以将标准信号准确的对应于物理量的被检测范围,如0-100℃或-10-100℃等等。这是用硬件电路对物理量进行数学变换。中央控制室的仪表将这些电信号驱动机械式的电压表、电流表就能显示被测的物理量。对于不同的量程范围,只要更换指针后面的刻度盘就可以了。更换刻度盘不会影响仪表的根本性质,这就给仪表的标准化、通用性和规模化生产带来的无可限量的好处。 3、数字化仪表 到了数字化时代,指针式显示表变成了更直观、更**的数字显示方式。在数字化仪表中,这种显示方式实际上是用纯数学的方式对标准信号进行逆变换,成为大家习惯的物理量表达方式。这种变换就是依靠软件做数学运算。这些运算可能是线性方程,也可能是非线性方程,现在的电脑对这些运算是易如反掌。 4、信号变换中的数学问题 信号的变换需要经过以下过程:物理量-传感器信号-标准电信号-A/D转换-数值显示。 声明:为简单起见,我们在此讨论的是线性的信号变换。略过传感器的信号变换过程。 假定物理量为A,范围即为A0-Am,实时物理量为X;标准电信号是B0-Bm,实时电信号为Y;A/D转换数值为C0-Cm,实时数值为Z。 如此,B0对应于A0,Bm对应于Am,Y对应于X,及Y=f(X)。由于是线性关系,得出方程式为Y=(Bm-B0)*(X-A0)/(Am-A0)+B0。又由于是线性关系,经过A/D转换后的数学方程Z=f(X)可以表示为Z=(Cm-C0)*(X-A0)/(Am-A0)+C0。那么就很容易得出逆变换的数学方程为X=(Am-A0)*(Z-C0)/(Cm-C0)+A0。方程中计算出来的X就可以在显示器上直接表达为被检测的物理量。 5、plc中逆变换的计算方法 以S7-200和4-20mA为例,经A/D转换后,我们得到的数值是6400-32000,及C0=6400,Cm=32000。于是,X=(Am-A0)*(Z-6400)/(32000-6400)+A0。 例如某温度传感器和变送器检测的是-10-60℃,用上述的方程表达为X=70*(Z-6400)/25600-10。经过PLC的数学运算指令计算后,hmi可以从结果寄存器中读取并直接显示为工程量。 用同样的原理,我们可以在HMI上输入工程量,由软件转换成控制系统使用的标准化数值。 在S7-200中,(Z-6400)/25600的计算结果是非常重要的数值。这是一个0-1.0(100%)的实数,可以直接送到PID指令(不是指令向导)的检测值输入端。PID指令输出的也是0-1.0的实数,通过前面的计算式的反计算,可以转换成6400-32000,送到D/A端口变成4-20mA输出。 |