次用S120![]() ,方案是CU310+PM240+1FT7+1500T 。
,方案是CU310+PM240+1FT7+1500T 。
1.其中有个伺服带抱闸 ,这个抱闸一般是这么控制的? 我想用CU310的DO16控制抱闸,看了老半天不知道应该连接哪个参数 ![]()
2.伺服次通电都要调整什么参数? 只做静态优化+动态优化能满足正常使用吗?
3. 还有电流环默认是125 可以改到62.5吗?
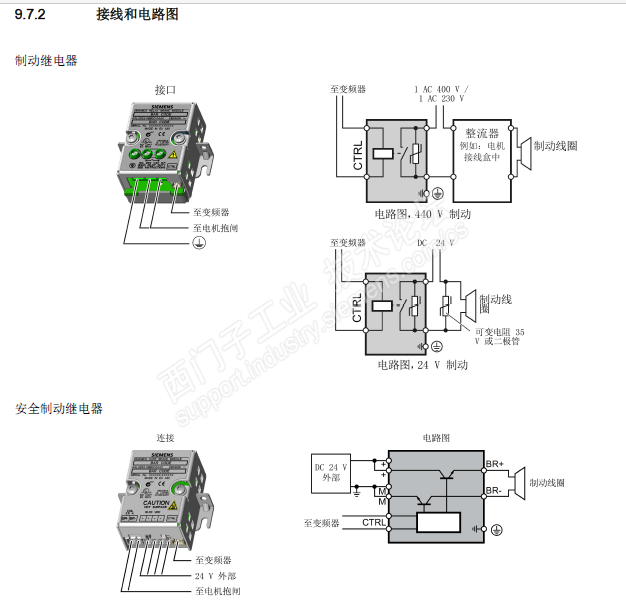
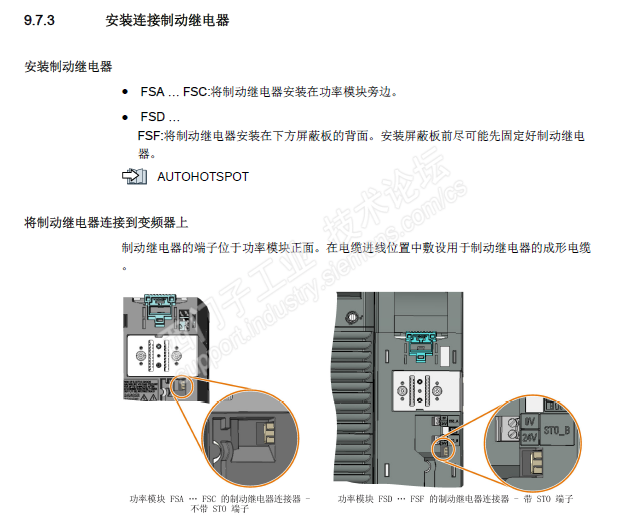
抱闸可以连接到PM240-2功率模块上,需要配置制动继电器。
次用S120![]() ,方案是CU310+PM240+1FT7+1500T 。
,方案是CU310+PM240+1FT7+1500T 。
1.其中有个伺服带抱闸 ,这个抱闸一般是这么控制的? 我想用CU310的DO16控制抱闸,看了老半天不知道应该连接哪个参数 ![]()
2.伺服次通电都要调整什么参数? 只做静态优化+动态优化能满足正常使用吗?
3. 还有电流环默认是125 可以改到62.5吗?
抱闸可以连接到PM240-2功率模块上,需要配置制动继电器。