S7-200与V20的USS通讯 1、本例程的系统配置: (1)安装Step7 Micro/Win V4.0 SP6软件和USS协议V2.3,软件下载地址: ......
S7-200与V20的USS通讯
1、本例程的系统配置:
(1)安装Step7 Micro/Win V4.0 SP6软件和USS协议V2.3,软件下载地址:
西门子标准库指令:
Micro/WIN V4.0 SP6软件下载地址:
(2)PC/PPI电缆、S7-200、电源模块、通信电缆。
(3)V20驱动装置和一台PC机。
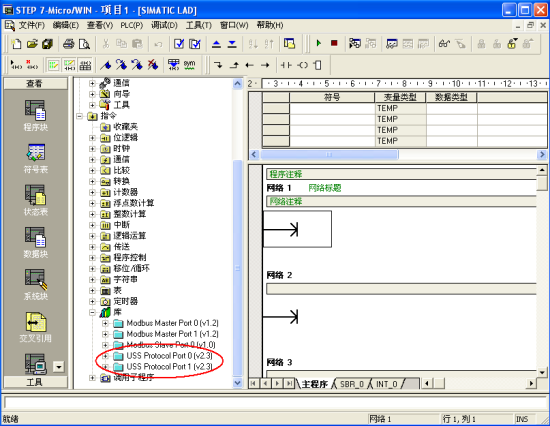
2、在使用MicroWin software 创建项目之前,确认USS库文件已经安装:
3、创建一个例程:
3.1 设置通讯接口
本例程使用PC/PPI电缆。

3.2 建立PC和PLC之间的连接
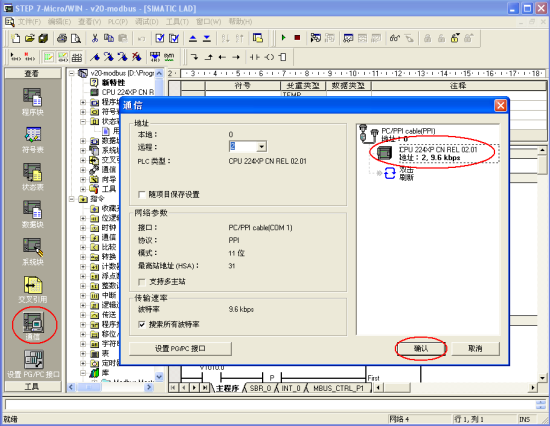
“双击刷新”搜索到PLC后,点击”确认”。
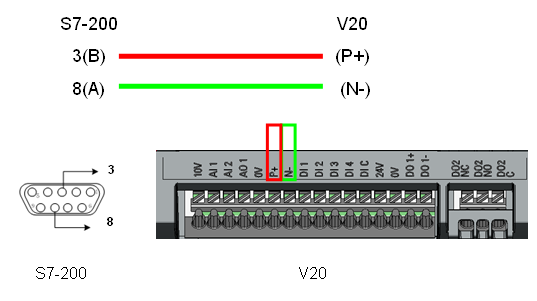
3.3 用电缆将S7-200 Port 0端口与V20的RS485接口相连(注意端口连接规则:V20的
P+对3、N-对8),如下图所示:
3.4 变频器参数设置:
V20 可以通过选择连接宏Cn010实现USS控制,也可以通过直接更改变频器参数的方法来实现。参数设置如下表所示:
表一:
| 参数 | 描述 | Cn010默认值 | 实际设置 | 备注 |
| P0700[0] | 选择命令源 | 5 | 5 | RS485为命令源 |
| P1000[0] | 选择频率 | 5 | 5 | RS485为速度设定值 |
| P2023 | RS485协议选择 | 1 | 1 | USS协议 |
| P2010[0] | USS/MODBUS波特率 | 8 | 6 | 波特率为9600bps |
| P2011[0] | USS地址 | 1 | 3 | 变频器的USS地址 |
| P2012[0] | USS PZD长度 | 2 | 2 | PZD部分的字数 |
| P2013[0] | USS PKW长度 | 127 | 127 | PKW部分字数可变 |
| P2014[0] | USS/MODBUS报文间断时间 | 500 | 0 | 接收数据时间 |
3.5 使用USS协议的初始化模块初始化S7-200的PORT0端口:
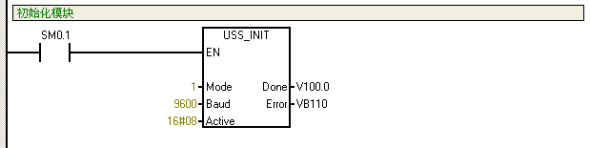
EN使能:每次改变通讯状态都应该执行一次初始化指令。EN信号应该通过边沿检测元件脉冲激活。
Mode:用这个USS输入值选择通讯协议。
1:为端口0指定USS协议,并启用该协议。
0:为端口0指定PPI协议,并禁止USS协议。
Baud: 波特率:9600,19200…115200。
Active:激活驱动地址。
Done:当USS_INIT 指令执行完成后,Done=1。
Error:指令执行的结果,如果有错误,显示错误代码。
Active:激活驱动地址举例:

3.6 使用USS——CTRL模块来控制USS地址为3的变频器,为了运行变频器需要按照表一设置参数:

状态表:

功能块定义:
EN:通常情况总是激活。
RUN:指示驱动为启用(1),或禁止(0)。
OFF2:允许V20自由停车。
OFF3:允许V20快速停止。
F _ACK:V20故障复位。
DIR:V20转动方向(0:逆时针;1:顺时针)。
Drive:V20地址 0-31。
Speed:速度给定值,以全速的百分比给出 (-200.0~~200.0%,负值时,V20反向)。
Resp_R:轮询V20,扫描时=1,并更新下面值。
Error:错误字节,参见表:USS指令执行错误。
Status:V20返回状态值。
Speed:V20速度,(-200.0~~200.0%)。
Run_EN:V20运行状态(1:运行;0:停止)。
D_DIR:V20转动方向(0:逆时针;1:顺时针)
Inhibit:V20禁止位状态。 (0:启用;1:禁止)。要清除禁止位,必须将Fault清零,
RUN,OFF2, OFF3输入也要清零。
Fault:指示故障状态。根据V20故障表确认故障。故障排除后,置位F _ACK使Fault
清零。
表二:Error 信息
| Error代码 | 说明 |
| 0 | 没有错误 |
| 1 | 驱动未响应 |
| 2 | 检测到驱动响应中存在校验和错误 |
| 3 | 检测到驱动响应中存在奇偶校验错误 |
| 4 | 由于用户程序干扰导致出错 |
| 5 | 尝试执行了无效命令 |
| 6 | 提供的驱动地址无效 |
| 7 | 该通讯接口不能实现USS协议 |
| 8 | 该通讯接口正在忙于处理指令 |
| 9 | 驱动速度输入溢出 |
| 10 | 驱动响应的长度不正确 |
| 11 | 驱动响应的首字符不正确 |
| 12 | 驱动响应的长度字符不正确 |
| 13 | 驱动响应错误 |
| 14 | 给出的DB_PTR地址不正确 |
| 15 | 给出的参数号不正确 |
| 16 | 选择了无效的协议 |
| 17 | 启用USS:不允许更改 |
| 18 | 指定了无效的波特率 |
| 19 | 无通讯:驱动未激活 |
| 20 | 驱动响应中的参数或值不正确 |
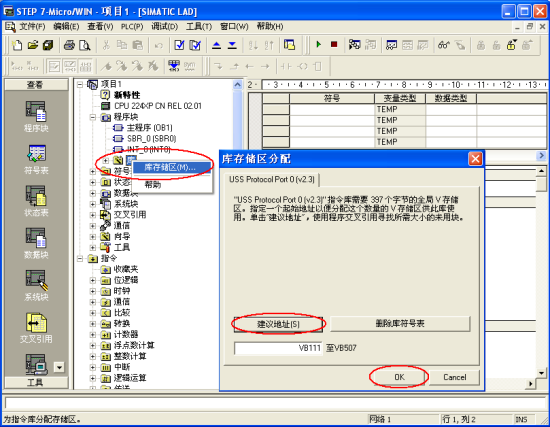
3.7 库存储区分配:在编译程序之前,选择 “程序块” ->“ 库” 右键,选择“库存储区”。在点击 “建议地址” 选择V存储区的地址后点击 “OK”退出。
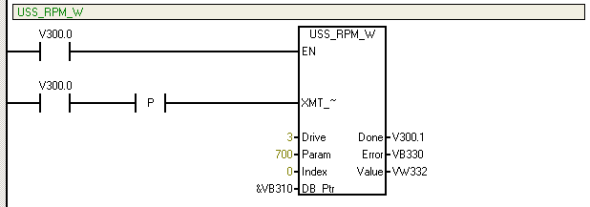
3.8 读写U16类型参数:
3.81举例:使用USS_RPM_W读取参数P0700的值;
状态表:

注意:
(1)读参数P0700,其数据类型为U16无符号整数。
(2)只要给V300.0一个上升沿,就完成一次P0700参数的读操作。
(3)读入的参数被放在VW332里。
(4)需要注意的是Index为0时代表读Pxxx.0参数组
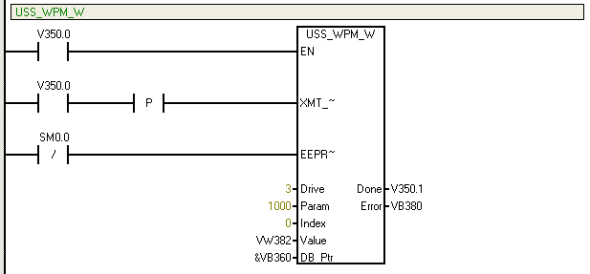
3.8.2 举例:使用USS_RPM_W设置参数P1000。
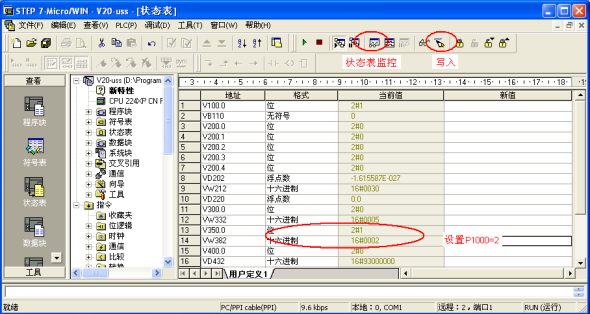
状态表:
注意:
(1)写参数P1000,其数据类型为U16无符号整数。
(2)只要给V350.0一个上升沿,就完成一次P1000参数的写操作。
(3)EEPR~的逻辑为0时,写入的值只保存到RAM中,为1时,写入得值保存到EEPROM。
(4)EEPROM中写数据是有次数限制的,V20多不超过50000次。
3.9 读写U32类型参数:
3.9.1举例:使用USS_RPM_D读取参数P0771.In000的值;
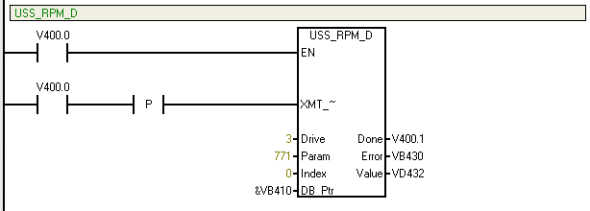
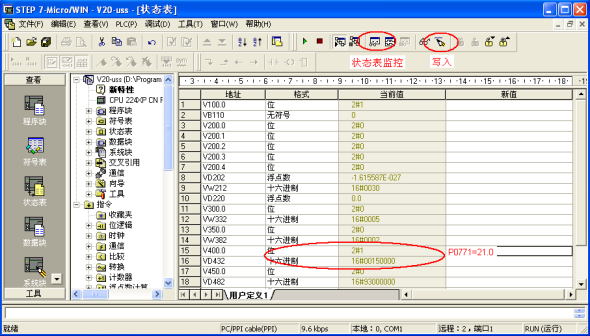
状态表:
注意:
(1)读参数P771,其数据类型为U32无符号整数。
(2)只要给V400.0一个上升沿,就完成一次P771参数的读操作。
(3)读入的参数被放在VD432里。16#00150000=21.0。
(4)需要注意的是Index为0时代表读Pxxx.0参数组。
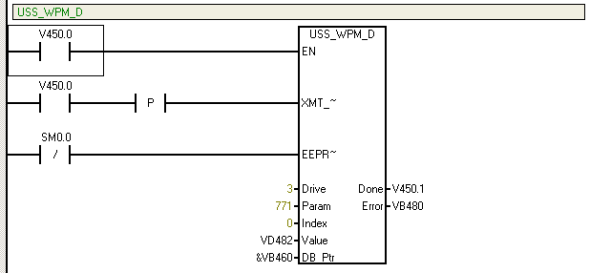
3.9.2 举例:使用USS_WPM_D设置参数P0771.In000
状态表:

注意:
(1)写参数P771,其数据类型为U32无符号整数。
(2)只要给V450.0一个上升沿,就完成一次P771参数的写操作。
(3)EEPR~的逻辑为0时,写入的值只保存到RAM中,为1时,写入得值保存到EEPROM。
(4)EEPROM中写数据是有次数限制的,V20多不超过50000次。
3.10读写Float类型参数:
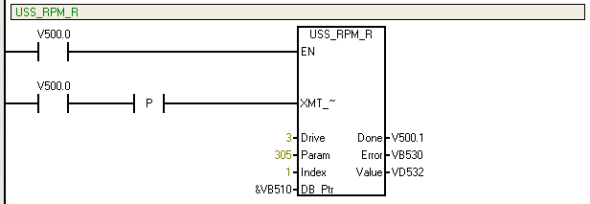
3.10.1举例:使用USS_RPM_R读取参数P0305.In001的值;
状态表:

注意:
(1)读参数P0305.In001,其数据类型为浮点数。
(2)只要给V550.0一个上升沿,就完成一次P0305.In001参数的读操作。
(3)读入的参数被放在VD532里。
(4)需要注意的是Index为1时代表读Pxxx.1参数组。
3.10.2举例:使用USS_WPM_R设置参数P0305.In001=1.5A
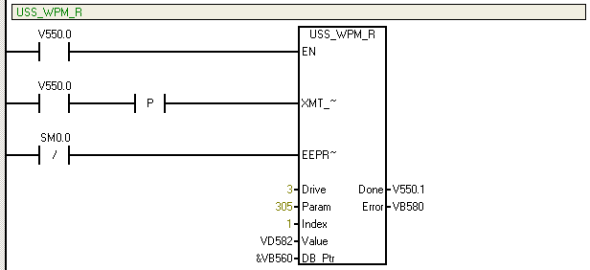
状态表:
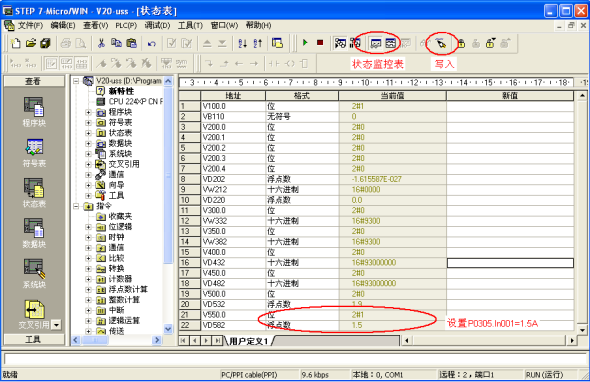
注意:
(1)写参数P0305.In001,其数据类型为浮点数。P0305更改条件:P0010=1快速调试。
(2)只要给V550.0一个上升沿,就完成一次参数P0305.In001的写操作。
(3)EEPR~的逻辑为0时,写入的值只保存到RAM中,为1时,写入得值保存到EEPROM。
(4)EEPROM中写数据是有次数限制的,V20多不超过50000次。
关键词
V20、USS